Линейное (или также векторное) пространство —
основополагающий термин, встречающийся, наверное, в подавляющем
большинстве работ по высшей математике. Поэтому он является также
необходимым пунктом программы по линейной алгебре любого факультета, на
котором преподаётся высшая математика. Это одна из тех абстракций, которые
ближе к жизни, чем большинство других, и которая, тем не менее, позволяет нам
изучить очень много свойств самых разнообразных объектов, категорически не
вдаваясь в какие-либо детали. Поэтому именно ей посвящена данная статья.В этой связи вспомним сперва о такой вещи, как школьные геометрические
векторы.Что тогда называлось вектором? Грубо говоря, вектором в школе была
некоторая стрелочка, которая имела длину и направление и могла быть
приложена к любой точке (например, к началу координат).Ассортимент действий с векторами был не очень велик: мы могли умножить
вектор на вещественное число, изменив этим его длину (и сменив направление
на противоположное, если число было отрицательное), и сложить его с
каким-нибудь другим вектором. При этом у каждого вектора был обратный (той
же длины, но направленный в противоположную сторону), сумма с которым давала
так называемый нулевой вектор. В частности, благодаря этому мы могли также
вычитать векторы.Притом эти свойства векторов были справедливы и для двухмерного, и для
трёхмерного случая. А можно больше?Оказывается, что этих свойств достаточно, чтобы создать нечто, похожее по
поведению на школьные векторы, но уходящее далеко за пределы школьной
геометрии.
Давайте скажем, что векторы — это элементы
некоторого непустого множества , на котором определены две операции:
сложение векторов (если , то ) и умножение векторов на
вещественные числа (если и , то ). Потребуем, чтобы
данные операции обладали следующими свойствами:
(ассоциативность сложения векторов);
существует особый вектор 0, называемый нулевым вектором, такой, что
Проще говоря, у нас есть набор некоторых штук, которые мы умеем складывать и
умножать на числа, причём так, как привыкли делать это с обычными
геометрическими векторами. Тогда такие штуки тоже можно называть
векторами, а множество из них всех будет называться линейным
пространством.Например, вспомним статью о матрицах. Там мы ввели такое
понятие, как вектор-столбец — таблицу чисел из строк и одного
столбца:
Вектор-столбцы одного размера можно складывать как обычные матрицы:
и умножать на числа, тоже как обычные матрицы:
Несложно проверить и выполнение для этих операций указанных выше свойств; в
частности, нулевым вектором будет вектор из нулей:
То есть получается, что множество из всех вектор-столбцов заданного
фиксированного размера с описанными выше операциями сложения и
умножения на число является вещественным линейным пространством. Оно
обозначается как .Но что же это за пространство?Мы знаем, что любая точка на плоскости (при зафиксированной системе
координат) описывается двумя числами — координатами. И каждый
геометрический вектор на плоскости тоже описывается двумя координатами —
например, координатами точки, в которую он «воткнётся», если отложить его от
начала координат. Мы также знаем, что чтобы сложить два вектора, достаточно
сложить их координаты, а чтобы умножить вектор на число, достаточно
умножить каждую координату на это число. Значит, если мы сопоставим каждому
вектору на плоскости вектор-столбец размера 2 с координатами этого вектора,
то получится, что все векторы плоскости составляют линейное пространство
! То же самое справедливо и для трёхмерного пространства: все векторы
пространства составляют линейное пространство . Получается, что для
пространство есть не что иное, как желанная абстракция,
–мерное пространство векторов!..Но и этим дело не исчерпывается. Давайте вспомним статью о
последовательностях. Последовательности мы тоже можем легко научиться
складывать и умножать на число:
Притом все вышеописанные свойства операций снова будут выполнены, и
нулевым «вектором» будет последовательность из нулей. Получается, что
всевозможные последовательности тоже образуют линейное пространство!
Причём ни при каком оно не совпадёт с , потому что каждый «вектор»
в нём описывается бесконечным количеством чисел. Оно является
бесконечномерным.
2. Линейная зависимость и базис
Первое, что нам понадобится в линейном пространстве — это система
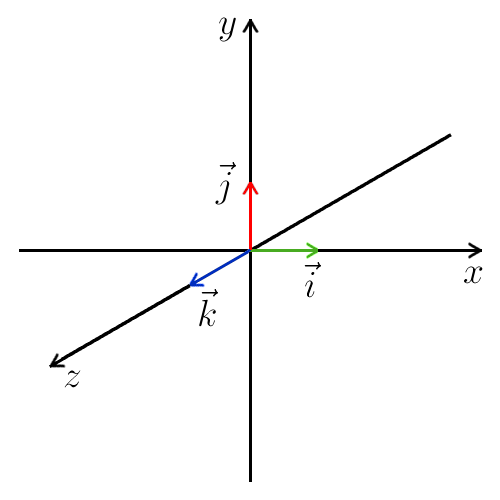
координат. В школьной геометрии в трёхмерном случае, например, у нас были
векторы :
Они также назывались ортами и несложно было увидеть, что если в
указанной системе координат какой-нибудь вектор имеет координаты
, то в терминах операций сложения векторов и умножения вектора на
число его можно было записать так:
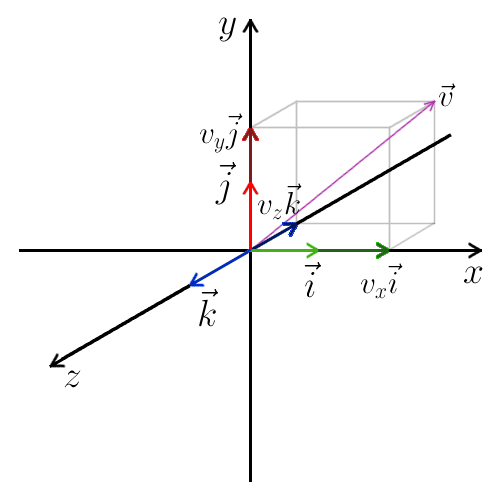
Геометрически это можно изобразить следующим образом:
То есть получается, что любой вектор трёхмерного пространства можно
представить в виде суммы трёх заранее определённых векторов с зависящими
от этого самого вектора коэффициентами. Это уже кое-что! Кстати, линейной комбинацией
каких-либо векторов называется любой вектор вида
Утверждение выше с использованием этого нового термина можно переписать:
любой вектор трёхмерного пространства является линейной комбинацией
векторов .Но, как видно, линейные комбинации существуют не только в 3D. Такую сумму
можно выписать для любых векторов любого (вещественного) линейного
пространства — а значит, можно попытаться сформулировать аналогичное
написанному выше утверждение, например, для описанного выше пространства
. И это легко сделать! Возьмём пространство (зафиксируем какое-нибудь
конкретное ) и введём в нём векторы :
Тогда, очевидно, любой вектор-столбец можно будет представить в виде их
линейной комбинации:
Векторы являются ортами линейного пространства .Таким образом, нами была получена первая аналогия между векторами школьной
геометрии и абстрактными векторами пространства , уходящая далеко
за рамки определения линейного пространства. И это только начало! Теперь изучим вот какой вопрос. Вспомним, например, плоскость. На плоскости
мы могли вводить много разных систем координат, и они могли отличаться
отнюдь не только началом отсчёта:
В приведённом примере мы просто «повернули» всю систему координат. Вектор
остался прежним, но, так как изменилась система координат (и орты
вместе с ней), то чтобы представить его в виде линейной комбинации новых орт
, нам потребуются новые координаты: и .То есть
Давайте теперь поставим перед собой задачу определить эти самые новые
координаты и . Для этого сперва заметим вот что: поскольку новые
орты — это обычные векторы, то они представимы в виде линейных комбинаций
старых орт, и наоборот. Давайте распишем эти представления:
Коэффициенты и , которые зависят только от старой и новой систем
координат, запишем в матрицы и :
(Кстати, если вы до сих пор не ознакомились со статьёй о
матрицах, настоятельно рекомендую это сделать.) Теперь подставим записанные представления в выражение для вектора :
Получается, что для нахождения и достаточно решить систему линейных
уравнений
Но, с другой стороны,
и оказывается, что справедлива также и система
Зная матрицу , мы теперь можем точно посчитать, чему равны и , но
даже это не главное. Запишем две получившиеся системы в операторной форме записи. Обозначив
получим следующий вид для записанных систем:
А эти два соотношения, выполняющиеся одновременно и для всех возможных
векторов , означают, что ! Таким образом, матрицы, которым посвящена такая обширная статья, нашли
применение уже в почти школьной геометрии плоскости. Что же будет дальше?.. Дальше нас ждёт следующий вопрос. Мы поняли, что систем координат с общим
началом отсчёта на плоскости может быть много, и что любые две из них
связаны соответствующей матрицей (и обратной к ней ). А может быть, любые
два вектора на плоскости представляют собой систему координат? Оказывается, что это почти так, и что любые два вектора на плоскости могут
использоваться в качестве системы координат, если только они не
параллельны. Случай параллельности приходится исключить, потому что
сколько ни суммируй параллельные векторы, а получаться будут векторы,
параллельные исходным, так что уже не любой вектор на плоскости будет
представим в виде линейной комбинации этих новых «орт», а только тот, что им
заведомо параллелен. (Зато он будет разлагаться в линейную комбинацию
бесконечным числом способов.)А что же будет в общем случае? Ясное дело, что всё будет не так просто. Уже в
трёхмерном пространстве трём векторам недостаточно быть непараллельными,
чтобы образовывать систему координат — нужно также, чтобы они не лежали в
одной плоскости, так как в противном случае всевозможные линейные
комбинации этих векторов не уйдут за пределы этой самой общей плоскости
(поскольку сумма векторов, лежащих в некоторой плоскости, лежит в ней же). А в
четырёхмерном случае подобное условие себе уже и представить сложно. Поэтому подойдём к вопросу выбора системы координат в пространстве
с практической точки зрения. Чего мы хотим от набора векторов,
определяющего какую-либо систему координат? Всего двух вещей:
каждый вектор интересующего нас пространства должен представляться в
виде некоторой их линейной комбинации;
эта линейная комбинация должна быть единственна, то есть у любого вектора
должен быть лишь один набор координат, описывающий его.
Второе требование может быть не так очевидно, но тем не менее оно
естественно. Мы, например, вполне могли бы взять три вектора плоскости, не
лежащих на одной прямой (то есть непараллельных) и сказать, что это система
координат, и у каждого вектора в ней было бы по три координаты. Но это
излишне, потому что, как мы знаем, двух координат для плоскости вполне
достаточно. И именно такие варианты отметает второе условие — ведь в
линейной комбинации из трёх двухмерных векторов любой можно выразить через
два других, получив тем самым ещё как минимум одну новую линейную
комбинацию, равную исходной. Теперь мы можем наконец ввести следующее фундаментальное определение:
любая конечная система векторов из произвольного
линейного пространства , удовлетворяющая двум указанным выше условиям,
называется базисом линейного
пространства . Таким образом, базисом в линейной алгебре называется система
векторов, по которой можно построить «хорошую» систему координат. Теперь дело остаётся за каким-нибудь разумным способом по заданной системе
векторов определить, является ли эта система базисом.
Ведь просто так, глянув на числа, трудно что-либо определить, а
геометрический подход теряет смысл, как только мы уходим из трёхмерного
пространства в какое-нибудь более сложное. Начнём со второго условия — единственности представления любого вектора в
виде линейной комбинации векторов базиса. (Кстати, это представление
называется разложением вектора по базису.) Что означает единственность и с
чем она может противоречить? Предположим, что единственности нет и для
некоторого вектора :
и в то же время
причём (то есть наборы коэффициентов не совпадают целиком).
Вычтем одно равенство из другого и получим, что
То есть существует линейная комбинация базисных векторов с хотя бы одним
ненулевым коэффициентом (такие линейные комбинации называются нетривиальными; тривиальной же называется линейная комбинация, все
коэффициенты в которой — нули, что вполне допустимо определением), которая
равна нулевому вектору. А это уже кое-что, и такое условие выглядит гораздо
проще, чем условие 2! В связи с этим давайте введём пару новых определений и
переформулируем определение базиса. Система векторов называется линейно независимой, если ни одна
нетривиальная линейная комбинация этих векторов не равна нулевому вектору,
и линейно зависимой,
если, наоборот, существует некая нетривиальная линейная комбинация этих
векторов, равная нулевому вектору.Наглядный пример можно привести на плоскости:
Три изображённых вектора не лежат на одной прямой, но тем не менее линейно
зависимы — ведь их сумма равна нулю. Линейной оболочкой
системы векторов из линейного
пространства называется множество всевозможных линейных комбинаций
этих векторов:
Иначе говоря, линейная оболочка — это множество из всех векторов, которые
мы можем получить, складывая заданные векторы с
различными коэффициентами. В это множество, например, входят сами векторы
, потому что любой из них является линейной комбинацией
этих векторов с одним-единственным ненулевым коэффициентом:
Также, очевидно, входит в него нулевой вектор, всегда (по определению) равный
тривиальной линейной оболочке заданных векторов:
Если и , то линейная оболочка является просто прямой,
проходящей через начало координат:
(В двухмерном и трёхмерном случае очевидно, что такое множество описывает
прямую; в общем же случае можно взять это за определение оной, и останется
лишь учесть, что прямая может быть «сдвинута» и не проходить через начало
координат.) Если и два указанных вектора непараллельны, то совершенно
аналогичным образом мы получим проходящую через начало координат
плоскость (если параллельны — снова прямую, по уже описанной выше причине,
если только, разумеется, хоть один из векторов ненулевой). Если и три
указанных вектора не лежат в одной плоскости, то их линейная оболочка будет
представлять из себя трёхмерное пространство. С линейными оболочками связан ещё один важный факт. Если у нас есть
некоторое линейное пространство и векторы , по
которым мы построили линейную оболочку , то эта
линейная оболочка тоже будет являться линейным пространством. В самом
деле, складывать векторы и умножать их на число мы уже умеем. Остаётся
проверить всего несколько пунктов определения:
Сумма любых двух векторов из должна лежать в . Проверим это. Пусть у
нас есть два каких-то вектора и , лежащих в . Раз уж они лежат в ,
то по определению они равны некоторым линейным комбинациям векторов
:
Но тогда, очевидно, их сумма тоже является линейной комбинацией тех же самых
векторов:
И тогда, снова по определению , получается, что сумма тоже обязательно
лежит в .
Произведение любого вектора на любое число должно лежать в . Тоже, в
общем-то, довольно очевидный факт: ведь если линейную комбинацию некоторых
векторов умножить на число, мы получим линейную комбинацию этих же векторов
с коэффициентами, умноженными на это число.
В пространстве должен лежать нулевой вектор. И он лежит, ведь он равен
тривиальной линейной комбинации векторов .
Для любого вектора в должен лежать вектор , обратный по
сложению, то есть такой, что . Если заметить, что
такой вектор всегда равен вектору , то видно, что он лежит в по
причине, описанной в предпредыдущем пункте.
Значит, — полноценное линейное пространство внутри линейного
пространства с теми же самыми арифметическими операциями. Подмножества
произвольного линейного пространства , сами являющиеся линейными
пространствами относительно введённой в арифметики, называются линейными подпространствами
линейного пространства . (Кстати, согласно этому определению, например,
всегда является своим подпространством. Но это так, формальности.) Теперь можно ввести новое, более короткое и лаконичное определение базиса.
Конечная система векторов из линейного пространства
называется базисом этого линейного пространства, если она линейно
независима и . И вот теперь мы наконец-то можем уверенно пойти дальше в изучении свойств
линейных пространств.
3. Конечномерные пространства
Линейное пространство называется конечномерным, если в нём существует базис. (Напомню,
что базис всегда конечен, по определению.) А вот можно ли по размеру базиса
измерить размерность пространства, например, сказать, что пространство
-мерное, если в нём есть базис из векторов? Могут ли в пространстве быть
два базиса с разным количеством векторов? К этому вопросу мы подойдём со всей строгостью и серьёзностью, и нам
предстоит доказать важнейшее утверждение — основную теорему о линейной
зависимости. Сперва рассмотрим какой-то произвольный базис
произвольного линейного пространства и зададимся сравнительно простым
вопросом: какие преобразования векторов этого базиса сохранят за ним право
называться базисом? А конкретнее, мы рассмотрим всего три преобразования.
Масштабирование одного из векторов базиса. Возьмём какое-нибудь число
и умножим на него какой-нибудь вектор . Полученная система
векторов будет базисом
наравне с прежней. Почему? Потому что любой вектор пространства по-прежнему
будет представим в виде линейной комбинации этих векторов, и по-прежнему
единственным образом. Действительно, пусть в старом базисе произвольный
вектор представлялся в виде
Тогда в новом базисе он будет представляться в виде
где . И представление это по-прежнему единственно, ведь будь
их два, представлений в исходном базисе тоже было бы два (достаточно было бы
умножить -е коэффициенты этих двух представлений на , чтобы получить
коэффициенты двух представлений того же самого вектора в старом базисе).
Прибавление к одному из векторов базиса другого, умноженного на число.
Возьмём какое-нибудь число (теперь никто не запрещает ему быть нулём,
хотя случай с нулём тривиален и неинтересен) и вместо вектора
«подсунем» в базис вектор , остальные векторы оставив
без изменения. Новая система векторов
тоже будет базисом.
Проверим это. Пусть какой-либо вектор представлялся в старом базисе в
виде
Тогда в новом базисе он примет вид
Это несложно проверить, подставив вместо сумму ,
раскрыв пару скобок и сократив пару слагаемых. Совершенно аналогично можно
получить представление вектора в прежнем базисе, зная представление в
новом. Значит, представление в новом базисе всегда существует и всегда
единственно, как и представление в прежнем базисе.
Перестановка двух векторов базиса местами. Ну тут всё очевидно.
Теперь, запасшись этими тремя возможностями изменять базис, сохраняя его
свойства, перейдём к главному утверждению. Сейчас мы попробуем доказать основную теорему о
линейной зависимости: в любом конечномерном линейном пространстве
все базисы состоят из одного и того же количества векторов.Доказывать будем от противного: давайте допустим, что это не так и что есть
два базиса с разным количеством векторов. Пусть эти базисы образуют векторы
и , причём для определённости .
Раз — базис, то через эти векторы можно выразить все
векторы второго базиса:
Запишем коэффициенты в матрицу
и попробуем поработать с ней.В матрице строк больше, чем столбцов и каждая строка представляет собой
координатное представление вектора в базисе . То
есть если мы умножим одну из строк матрицы на число, то мы фактически
умножим на это число весь вектор , применив первое из описанных выше
преобразований, оставляющих базис базисом; если же мы к одной из строк этой
матрицы прибавим (ну или вычтем) другую строку, умноженную на число, то мы
произведём второе из описанных выше преобразований с соответствующими
этим двум строкам векторами. Значит, работая с матрицей , мы можем работать со всем базисом
. Теперь остаётся в поисках противоречия, применяя
описанные выше преобразования, оставляющие базис базисом, получить некую
модифицированную систему векторов, которая базисом точно не является.
Например, в которой один из векторов — нулевой. Тогда мы сможем точно
сказать, что базисом она на самом деле не являлась никогда. Итак, у нас есть матрица . Сперва найдём элемент первого столбца этой
матрицы, не равный нулю. Его не может не быть: если весь первый столбец забит
нулями, то через векторы никак нельзя выразить вектор
(потому что как их ни складывай, а коэффициент при всегда будет
равен нулю), а это противоречит тому, что — базис. Теперь поменяем любую строчку, в которой первый элемент оказался ненулевым,
местами с первой. Получим какую-то новую матрицу
в которой первый элемент первой строчки не равен нулю. Теперь вычтем из
второй строчки первую, умноженную на некоторый коэффициент :
Теперь положим (деления на ноль не возникнет, так уж мы
выбирали ) и получим матрицу
Теперь повторим такую операцию с коэффициентом для
каждой -й строки и получим матрицу вида
Таким образом, меняя базис описанными выше
преобразованиями и перестановкой его векторов местами, мы получили
некоторый новый базис, для которого матрица имеет вот такой вот особенный
вид.Теперь приступим ко второму столбцу матрицы. Снова начнём с поиска в нём
ненулевого элемента. Если он не нашёлся — через наш новый базис нельзя
выразить вектор , и мы приходим к искомому противоречию.Так что пусть ненулевой элемент нашёлся. Если он нашёлся в какой-то строчке,
которая ниже первой, то поставим её на место второй: получаем матрицу
Теперь вычтем из каждой строчки, начиная с третьей, вторую, умноженную на
. Проделав всё это, получим матрицу вида
Если же единственный ненулевой элемент всё-таки выпал на первую строчку, то
мы можем оставить всё как было и переходить к третьему столбцу — ведь, судя
по дефициту ненулевых элементов, второй уже обнулился автоматически.Продолжая подобные рассуждения для последующих столбцов, мы приведём
матрицу к некоторому треугольному виду, который, в силу того, что строк в ней
заведомо больше, чем столбцов, будет выглядеть следующим образом:
Некоторые элементы на диагонали и даже над ней могут быть нулевыми, в
зависимости от того, как часто ненулевые элементы столбцов выпадали на уже
«отложенные» строки. Но как бы там ни было, здесь уже ясно видно, что
последние по меньшей мере векторов нашего нового базиса —
нулевые! Получается, что мы взяли некоторый базис и, используя только
преобразования, которые заведомо оставляют его базисом, пришли к странной
системе векторов, среди которых даже есть нулевые и которая поэтому
совершенно точно не способна быть базисом. Это противоречит тому, что
исходная система векторов была базисом. Значит, если
есть некоторый базис из векторов, то никакого базиса из векторов
существовать не может.Таким образом, основная теорема о линейной зависимости нами
наконец-то доказана. Теперь мы можем смело заявить, что число называется размерностью пространства ,
если в существует базис из векторов; при этом пространство также
называют -мерным. Размерность пространства обозначается как .Кроме того, если в -мерном зафиксировать какой-нибудь конкретный базис
, то можно свести любую деятельность в к деятельности
в . Достаточно отождествить любой вектор с его коэффициентами
разложения по базису . Ведь для сложения двух векторов
достаточно сложить их коэффициенты, для умножения на число — умножить все
коэффициенты на это число. Поэтому любое конечномерное пространство
можно отождествить с пространством с некоторым конкретным ,
зависящим от (а именно равным ). Таким образом, любая деятельность в -мерном линейном пространстве может
быть сведена к махинациям с матрицами и вектор-столбцами. Поэтому материал
этой статьи и статьи о матрицах в дальнейшем будет, скорее всего,
существенно пересекаться. Потому также возможны различные подходы к
решению одних и тех же задач в линейной алгебре: можно копаться в матрицах и
вектор-столбцах, которые легко себе представить и записать, а можно
оперировать линейными пространствами, подпространствами, базисами и
линейными операторами (о которых речь пойдёт дальше). Представлять себе
последние обычно сложнее, но зачастую решения могут стать существенно
короче и элегантнее. (Лишний повод разобраться в линейных пространствах
особенно ленивым студентам: во многих задачах можно будет меньше писать.)
, на котором определены две операции: сложение векторов (если
, то
) и умножение векторов на вещественные числа (если
и
, то
). Потребуем, чтобы данные операции обладали следующими свойствами:
(ассоциативность сложения векторов);

такой, что

(коммутативность сложения векторов);
;
(дистрибутивность);
(дистрибутивность);
.
 строк и одного
столбца:
строк и одного
столбца:




 .Но что же это за пространство?Мы знаем, что любая точка на плоскости (при зафиксированной системе
координат) описывается двумя числами — координатами. И каждый
геометрический вектор на плоскости тоже описывается двумя координатами —
например, координатами точки, в которую он «воткнётся», если отложить его от
начала координат. Мы также знаем, что чтобы сложить два вектора, достаточно
сложить их координаты, а чтобы умножить вектор на число, достаточно
умножить каждую координату на это число. Значит, если мы сопоставим каждому
вектору на плоскости вектор-столбец размера 2 с координатами этого вектора,
то получится, что все векторы плоскости составляют линейное пространство
.Но что же это за пространство?Мы знаем, что любая точка на плоскости (при зафиксированной системе
координат) описывается двумя числами — координатами. И каждый
геометрический вектор на плоскости тоже описывается двумя координатами —
например, координатами точки, в которую он «воткнётся», если отложить его от
начала координат. Мы также знаем, что чтобы сложить два вектора, достаточно
сложить их координаты, а чтобы умножить вектор на число, достаточно
умножить каждую координату на это число. Значит, если мы сопоставим каждому
вектору на плоскости вектор-столбец размера 2 с координатами этого вектора,
то получится, что все векторы плоскости составляют линейное пространство
 ! То же самое справедливо и для трёхмерного пространства: все векторы
пространства составляют линейное пространство
! То же самое справедливо и для трёхмерного пространства: все векторы
пространства составляют линейное пространство  . Получается, что для
. Получается, что для
 пространство
пространство 

 :
:
 имеет координаты
имеет координаты
 , то в терминах операций сложения векторов и умножения вектора на
число его можно было записать так:
, то в терминах операций сложения векторов и умножения вектора на
число его можно было записать так:

 называется любой вектор вида
называется любой вектор вида

 :
:


 являются ортами линейного пространства
являются ортами линейного пространства  остался прежним, но, так как изменилась система координат (и орты
вместе с ней), то чтобы представить его в виде линейной комбинации новых орт
остался прежним, но, так как изменилась система координат (и орты
вместе с ней), то чтобы представить его в виде линейной комбинации новых орт
 , нам потребуются новые координаты:
, нам потребуются новые координаты:  и
и  .То есть
.То есть

![\begin{array}{ccccc}\vec{i'}&=&a_{11}\vec{i}&+&a_{12}\vec{j},\\[2mm]
\vec{j'}&=&a_{21}\vec{i}&+&a_{22}\vec{j},\\[2mm]
\vec{i}&=&b_{11}\vec{i'}&+&b_{12}\vec{j'},\\[2mm]
\vec{j}&=&b_{21}\vec{i'}&+&b_{22}\vec{j'}.\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDEyNyA5MSIKICAgaGVpZ2h0PSI5MSIKICAgd2lkdGg9IjEyNyIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDkxKSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODkuODU5NCw4ODQuNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcxLDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTU2LDIuNzE5IC00LjAzMTMsMi43MzQgLTUuMDMxMyw2LjYwOSAtNS40Njg4LDguMzI4IC0wLjQyMTgsMS4xNTYgLTAuODU5MywyLjg3NSAtMi44NTkzLDIuODc1IC0wLjg3NSwwIC0yLjU5MzgsLTAuNTYzIC0yLjU5MzgsLTIuNzE5IDAsLTEuMjk3IDAuODU5NCwtNC43NSAzLjU5MzgsLTguNjI1IGwgLTQ4LjI2NTcsMCBjIC0yLjQ1MzEsMCAtNC44OTA2LDAgLTQuODkwNiwtMi43MzQgMCwtMi41NzggMi41OTM4LC0yLjU3OCA0Ljg5MDYsLTIuNTc4IGwgNDUuOTY4OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTkuNjU2Myw3ODQuNTQ3IGMgMCwwLjcxOSAtMC41NzgyLDEuMjgxIC0xLjQzNzUsMS4yODEgLTEuMjk2OSwwIC0xLjQzNzUsLTAuNDIyIC0yLjE1NjMsLTIuODU5IC0zLjczNDQsLTEzLjA3OCAtOS42MjUsLTE3LjUzMSAtMTQuMzU5NCwtMTcuNTMxIC0xLjczNDMsMCAtMy43MzQzLDAuNDM3IC0zLjczNDMsNC43MzQgMCwzLjg5MSAxLjcxODcsOC4xODcgMy4yOTY4LDEyLjUgbCAxMC4wNjI1LDI2LjcxOSBjIDAuNDIxOSwxLjE1NiAxLjQzNzUsMy43MzQgMS40Mzc1LDYuNDY4IDAsNi4wMzIgLTQuMzEyNSwxMS41IC0xMS4zNTkzLDExLjUgLTEzLjIxODgsMCAtMTguNTMxMywtMjAuODQzIC0xOC41MzEzLC0yMS45ODQgMCwtMC41NzggMC41NzgxLC0xLjI5NyAxLjU3ODEsLTEuMjk3IDEuMjk2OSwwIDEuNDM3NSwwLjU3OCAyLjAxNTcsMi41OTQgMy40NTMxLDEyLjA2MiA4LjkwNjIsMTcuODEyIDE0LjUxNTYsMTcuODEyIDEuMjgxMiwwIDMuNzM0NCwtMC4xNTYgMy43MzQ0LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE1NywtMTEuNjI1IEwgMzEuNjQwNiw3ODEuMzc1IGMgLTAuODU5MywtMi4yOTcgLTEuNzE4NywtNC41OTQgLTEuNzE4NywtNy4xNzIgMCwtNi40NjkgNC40NTMxLC0xMS42NCAxMS4zNDM3LC0xMS42NCAxMy4yMTg4LDAgMTguMzkwNywyMC45NjggMTguMzkwNywyMS45ODQgeiBNIDU4LjUsODUzLjY0MSBjIDAsMi4xNTYgLTEuNzE4Nyw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyNSwwIC03LjA0NjksLTMuMTU2IC03LjA0NjksLTYuODkxIDAsLTMuNTkzIDMuMDE1NywtNC43MzQgNC43NSwtNC43MzQgMy44NzUsMCA3LjE3MTksMy43MzQgNy4xNzE5LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTIuMTI1LDg1My4xODggYyAwLjUsMS4xODcgMC45MDYzLDIuMDc4IDAuOTA2MywzLjA3OCAwLDIuODc1IC0yLjU5MzgsNS4yNjUgLTUuNjcxOSw1LjI2NSAtMi43ODEzLDAgLTQuNTYyNSwtMS44OSAtNS4yNjU2LC00LjQ2OCBMIDcwLjI4MTMsODEzLjY1NiBjIDAsLTAuMjAzIC0wLjQwNjMsLTEuMjk3IC0wLjQwNjMsLTEuMzkgMCwtMS4wOTQgMi41OTM4LC0xLjc5NyAzLjM5MDYsLTEuNzk3IDAuNTkzOCwwIDAuNjg3NSwwLjI5NyAxLjI4MTMsMS41OTQgbCAxNy41NzgxLDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDMwNC45NjksODEwLjU0NyBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM1IC0yLjQzOCwyLjczNSAtNC41OTQsMi43MzUgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41OTQgMCwtMi43MTkgMi40NTMsLTIuNzE5IDQuNjA5LC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0NzAuMjM0LDc4MS4wOTQgYyAtMC43MTgsLTIuNDM4IC0wLjcxOCwtMi43MzUgLTIuNzE4LC01LjQ1MyAtMy4xNzIsLTQuMDMyIC05LjQ4NSwtMTAuMjAzIC0xNi4yMzUsLTEwLjIwMyAtNS44OSwwIC05LjIwMyw1LjMxMiAtOS4yMDMsMTMuNzk2IDAsNy44OTEgNC40NTMsMjMuOTg1IDcuMTg4LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYgeiBtIDkuMjA0LDM2Ljc4MSBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4LC0yMi41NjIgMTguMDk0LC0yMi41NjIgNy45MDYsMCAxNC42NTYsNi4xNzEgMTguNjcyLDEwLjkyMSAxLjQzNywtOC40ODQgOC4xODcsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMTIsMCA3Ljc2NSwyLjU5MyAxMC4zNDMsNy43NjUgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQxIDQuMzEzLDE0LjIxOSAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzgsMS4yODEgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMyAtMi4wMTUsLTIuODU5IC0yLjE0MSwtOC40ODUgLTQuODc1LC0xNy41MzEgLTEwLjc2NiwtMTcuNTMxIC00LjE3MiwwIC00LjQ1MywzLjczNCAtNC40NTMsNi42MDkgMCwzLjI5NyAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQgMS4wMTUsMy41OTQgMS43MzQsNi43NSAyLjg3NSwxMC45MjIgNS4zMTIsMjEuNTQ3IDYuNjA5LDI2LjcxOSA2LjYwOSwyNy41NzggMCwyLjAxNiAtMS41NzgsMy41OTQgLTMuNzM0LDMuNTk0IC00LjU5NCwwIC01Ljc1LC01LjAzMSAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1MjkuMjAzLDgwNi41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NzkuMjAzLDgwNi41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NTkuODU5LDg4Mi43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY0NC42NTYsNzg0LjU0NyBjIDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzNywxLjI4MSAtMS4yOTcsMCAtMS40MzgsLTAuNDIyIC0yLjE1NiwtMi44NTkgLTMuNzM1LC0xMy4wNzggLTkuNjI1LC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzM0LDAgLTMuNzM0LDAuNDM3IC0zLjczNCw0LjczNCAwLDMuODkxIDEuNzE5LDguMTg3IDMuMjk3LDEyLjUgbCAxMC4wNjIsMjYuNzE5IGMgMC40MjIsMS4xNTYgMS40MzgsMy43MzQgMS40MzgsNi40NjggMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMDYyIDguOTA2LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsLTAuMTU2IDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE2LC0xMS42MjUgbCAtMTAuMDYyLC0yNi43MzQgYyAtMC44NiwtMi4yOTcgLTEuNzE5LC00LjU5NCAtMS43MTksLTcuMTcyIDAsLTYuNDY5IDQuNDUzLC0xMS42NCAxMS4zNDQsLTExLjY0IDEzLjIxOCwwIDE4LjM5LDIwLjk2OCAxOC4zOSwyMS45ODQgeiBtIC0xLjE1Niw2OS4wOTQgYyAwLDIuMTU2IC0xLjcxOSw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyLDAgLTcuMDQ3LC0zLjE1NiAtNy4wNDcsLTYuODkxIDAsLTMuNTkzIDMuMDE2LC00LjczNCA0Ljc1LC00LjczNCAzLjg3NSwwIDcuMTcyLDMuNzM0IDcuMTcyLDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODE5LjMxMyw3OTcuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAyMy4yMyw3ODEuMDk0IGMgLTAuNzEsLTIuNDM4IC0wLjcxLC0yLjczNSAtMi43MSwtNS40NTMgLTMuMTgsLTQuMDMyIC05LjQ5LC0xMC4yMDMgLTE2LjI0LC0xMC4yMDMgLTUuODg5LDAgLTkuMjAyLDUuMzEyIC05LjIwMiwxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xOTIsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMywxNS4yMzQgOS40OCwwIDExLjM2LC0xMS43ODEgMTEuMzYsLTEyLjkzNyAwLC0wLjE0MSAtMC40NCwtMiAtMC41OCwtMi4yOTcgbCAtNy4wNSwtMjguMTU2IHogbSA5LjIxLDM2Ljc4MSBjIC0xLjU4LDMuNzM0IC01LjQ3LDkuNDg0IC0xMi45NCw5LjQ4NCAtMTYuMjMsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwODIuMiw4MDYuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4LDIuNTc4IC02LjE1LC02LjM1OSAtMTQuOSwtNi4zNTkgLTE4LjA4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjMsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3LDAgMCwtMy4wNzggYyAzLjQ3LDAuMjk3IDEyLjEyLDAuMjk3IDE2LjA5LDAuMjk3IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk3IGwgMCwzLjA3OCAtMy4xOSwwIGMgLTguOTQsMCAtOS4yNCwxLjA5NCAtOS4yNCw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTExNi42MSw3NTAuNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4LC05LjE0IC0xOC41OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTcsLTUuNTYzIDUuMjYsLTUuNTYzIDEuNjksMCA1LjE2LDEuMjA0IDUuMTYsNS4yNjYgMCwyLjU5NCAtMS43OCw1LjE3MiAtNS4yNiw1LjE3MiAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDk0IDIuMjksNi40NTMgNy42NCwxMC4xMjUgMTMuNDEsMTAuMTI1IDkuMDUsMCAxMy4zMSwtOC4wNDcgMTMuMzEsLTE2LjE4NyAwLC03Ljk1MyAtNC45NywtMTUuNzk3IC0xMC40MywtMjEuOTUzIGwgLTE5LjA3LC0yMS4yNjYgYyAtMS4wOSwtMS4wOTQgLTEuMDksLTEuMjgxIC0xLjA5LC0zLjY3MiBsIDM2Ljg2LDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOSwtOC44NDMgLTAuNzEsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40NCwtMC43ODIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMjAuODYsODgyLjc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIwOC4yOCw4MDkuNTQ3IGMgMC41OCwyLjI5NyAwLjU4LDQuMjk3IDAuNTgsNC44NzUgMCw4LjMyOCAtNi4xOSwxMi45MzcgLTEyLjY0LDEyLjkzNyAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NCAtMjIuMjcsLTIxLjk4NCAwLC0wLjcxOSAwLjU3LC0xLjI5NyAxLjQzLC0xLjI5NyAxLjE1LDAgMS4yOSwwLjU3OCAyLjAxLDIuMDE2IDUuNzUsMTMuOTM3IDEyLjk0LDE4LjM5IDE4LjM5LDE4LjM5IDMuMDIsMCA0LjYsLTEuNTc4IDQuNiwtNi42MDkgMCwtMy40NTMgLTAuNDMsLTQuODkxIC0xLC03LjQ2OSBsIC0xMy42NiwtNTQuMTU2IGMgLTIuNzIsLTEwLjY0MSAtOS40NywtMTguNjg3IC0xNy4zOCwtMTguNjg3IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNyAzLjQ1LDAuNzE5IDYuMTgsMy40NTMgNi4xOCw2LjkwNiAwLDIuMjk3IC0xLjczLDQuNTk0IC00Ljg5LDQuNTk0IC0zLjczLDAgLTcuMTgsLTMuMTcyIC03LjE4LC03LjQ2OSAwLC01Ljg5IDYuMzIsLTguMzQzIDEyLjIxLC04LjM0MyA5LjkxLDAgMjIuOTksNy4zMjggMjYuNTgsMjEuNzAzIGwgMTMuMzYsNTMuMTU2IHogbSA1Ljg5LDQ0LjA5NCBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjUyLjAyLDc2My40MjIgYyAwLDguMzI4IC0yLjc0LDE0LjUxNiAtOC42MywxNC41MTYgLTQuNTksMCAtNi44OSwtMy43MzUgLTYuODksLTYuODkxIDAsLTMuMTcyIDIuMTYsLTcuMDQ3IDcuMDMsLTcuMDQ3IDEuODgsMCAzLjQ1LDAuNTc4IDQuNzUsMS44NzUgMC4yOCwwLjI4MSAwLjQyLDAuMjgxIDAuNTgsMC4yODEgMC4yOCwwIDAuMjgsLTIuMDE1IDAuMjgsLTIuNzM0IDAsLTQuNzM0IC0wLjg2LC0xNC4wNzggLTkuMTksLTIzLjQwNiAtMS41OSwtMS43MzUgLTEuNTksLTIuMDE2IC0xLjU5LC0yLjMxMyAwLC0wLjcwMyAwLjcyLC0xLjQyMiAxLjQ0LC0xLjQyMiAxLjE1LDAgMTIuMjIsMTAuNjI1IDEyLjIyLDI3LjE0MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg5Ljg1OTQsNjM5Ljc2NiBjIC0xLjczNDQsLTEuNTc4IC03LjA0NjksLTYuNjEgLTcuMDQ2OSwtOC42MjUgMCwtMS40MzggMS4yOTY5LC0yLjcxOSAyLjczNDQsLTIuNzE5IDEuMjk2OSwwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzMSw0LjI5NyA3LjMyODEsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3MSwwLjg1OSAyLjQ1MzEsMS4yODEgMi40NTMxLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDYwLjI4MTMsNTY0LjU0NyBjIDAuNTc4MSwyLjI5NyAwLjU3ODEsNC4yOTcgMC41NzgxLDQuODc1IDAsOC4zMjggLTYuMTg3NSwxMi45MzcgLTEyLjY0MDYsMTIuOTM3IC0xNC41MTU3LDAgLTIyLjI2NTcsLTIwLjk4NCAtMjIuMjY1NywtMjEuOTg0IDAsLTAuNzE5IDAuNTYyNSwtMS4yOTcgMS40MjE5LC0xLjI5NyAxLjE1NjMsMCAxLjI5NjksMC41NzggMi4wMTU2LDIuMDE2IDUuNzUsMTMuOTM3IDEyLjkzNzUsMTguMzkgMTguMzkwNywxOC4zOSAzLjAxNTYsMCA0LjU5MzcsLTEuNTc4IDQuNTkzNywtNi42MDkgMCwtMy40NTMgLTAuNDIxOSwtNC44OTEgLTEsLTcuNDY5IEwgMzcuNzE4OCw1MTEuMjUgQyAzNSw1MDAuNjA5IDI4LjI1LDQ5Mi41NjMgMjAuMzQzOCw0OTIuNTYzIGMgLTAuNTc4MiwwIC0zLjU5MzgsMCAtNi4zMjgyLDEuNDM3IDMuNDUzMiwwLjcxOSA2LjE4NzUsMy40NTMgNi4xODc1LDYuOTA2IDAsMi4yOTcgLTEuNzM0Myw0LjU5NCAtNC44OTA2LDQuNTk0IC0zLjczNDQsMCAtNy4xODc1LC0zLjE3MiAtNy4xODc1LC03LjQ2OSAwLC01Ljg5IDYuMzI4MSwtOC4zNDMgMTIuMjE4OCwtOC4zNDMgOS45MDYyLDAgMjIuOTg0Myw3LjMyOCAyNi41NzgxLDIxLjcwMyBsIDEzLjM1OTQsNTMuMTU2IHogbSA1Ljg5MDYsNDQuMDk0IGMgMCwzLjU5MyAtMy4wMTU2LDQuNzM0IC00Ljc1LDQuNzM0IC0zLjg3NSwwIC03LjE3MTksLTMuNzM0IC03LjE3MTksLTYuODkxIDAsLTIuMTU2IDEuNzE4OCwtNC43MzQgNC44NzUsLTQuNzM0IDMuMzEyNSwwIDcuMDQ2OSwzLjE1NiA3LjA0NjksNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDEuMTI1LDYwOC4xODggYyAwLjUsMS4xODcgMC45MDYsMi4wNzggMC45MDYsMy4wNzggMCwyLjg3NSAtMi41OTM1LDUuMjY1IC01LjY3MTYsNS4yNjUgLTIuNzgxMywwIC00LjU2MjUsLTEuODkgLTUuMjY1NiwtNC40NjggTCA3OS4yODEzLDU2OC42NTYgYyAwLC0wLjIwMyAtMC40MDYzLC0xLjI5NyAtMC40MDYzLC0xLjM5IDAsLTEuMDk0IDIuNTkzOCwtMS43OTcgMy4zOTA2LC0xLjc5NyAwLjU5MzgsMCAwLjY4NzUsMC4yOTcgMS4yODEzLDEuNTk0IGwgMTcuNTc4MSw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzMDQuOTY5LDU2NS41NDcgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNCAtMi40MzgsMi43MzQgLTQuNTk0LDIuNzM0IGwgLTg0LjYxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4IDAsLTIuNzM0IDIuNDUzLC0yLjczNCA0LjYwOSwtMi43MzQgbCA4NC42MSwwIHogbSAwLC0yNi43MTkgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNSAtMi40MzgsMi43MzUgLTQuNTk0LDIuNzM1IGwgLTg0LjYxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTk0IDAsLTIuNzE5IDIuNDUzLC0yLjcxOSA0LjYwOSwtMi43MTkgbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDcwLjIzNCw1MzYuMDk0IGMgLTAuNzE4LC0yLjQzOCAtMC43MTgsLTIuNzM1IC0yLjcxOCwtNS40NTMgLTMuMTcyLC00LjAzMiAtOS40ODUsLTEwLjIwMyAtMTYuMjM1LC0xMC4yMDMgLTUuODksMCAtOS4yMDMsNS4zMTIgLTkuMjAzLDEzLjc5NiAwLDcuODkxIDQuNDUzLDIzLjk4NSA3LjE4OCwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzNCwxNS4yMzQgOS40ODQsMCAxMS4zNTksLTExLjc4MSAxMS4zNTksLTEyLjkzNyAwLC0wLjE0MSAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NyBsIC03LjA0NywtMjguMTU2IHogbSA5LjIwNCwzNi43ODEgYyAtMS41NzksMy43MzQgLTUuNDY5LDkuNDg0IC0xMi45MzgsOS40ODQgLTE2LjIzNCwwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMyOCwtMjIuNTYyIDE4LjA5NCwtMjIuNTYyIDcuOTA2LDAgMTQuNjU2LDYuMTcxIDE4LjY3MiwxMC45MjEgMS40MzcsLTguNDg0IDguMTg3LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEyLDAgNy43NjUsMi41OTMgMTAuMzQzLDcuNzY1IDIuMjk3LDQuODc1IDQuMzEzLDEzLjY0MSA0LjMxMywxNC4yMTkgMCwwLjcxOSAtMC41NzgsMS4yODEgLTEuNDM4LDEuMjgxIC0xLjI5NiwwIC0xLjQzNywtMC43MDMgLTIuMDE1LC0yLjg1OSAtMi4xNDEsLTguNDg1IC00Ljg3NSwtMTcuNTMxIC0xMC43NjYsLTE3LjUzMSAtNC4xNzIsMCAtNC40NTMsMy43MzQgLTQuNDUzLDYuNjA5IDAsMy4yOTcgMC40MjIsNC44NzUgMS43MTksMTAuNDg0IDEuMDE1LDMuNTk0IDEuNzM0LDYuNzUgMi44NzUsMTAuOTIyIDUuMzEyLDIxLjU0NyA2LjYwOSwyNi43MTkgNi42MDksMjcuNTc4IDAsMi4wMTYgLTEuNTc4LDMuNTk0IC0zLjczNCwzLjU5NCAtNC41OTQsMCAtNS43NSwtNS4wMzEgLTYuMDMxLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTEyLjYwOSw1MDUuNjU2IDEwLjUzMiwxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NjgsMTkuMDc4IDIxLjQ2OCwyOS4wMTYgMCwxMS4zMjggLTguOTUzLDE5LjI2NSAtMjEuMDYyLDE5LjI2NSAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNCAtMTguNTc4LC0xNy45ODQgMCwtNS41NjMgNC45NjksLTUuNTYzIDUuMjY1LC01LjU2MyAxLjY4OCwwIDUuMTU3LDEuMjA0IDUuMTU3LDUuMjY2IDAsMi41OTQgLTEuNzgyLDUuMTcyIC01LjI2Niw1LjE3MiAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDk0IDIuMjgxLDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ3IDEzLjMxMywtMTYuMTg3IDAsLTcuOTUzIC00Ljk2OSwtMTUuNzk3IC0xMC40MzgsLTIxLjk1MyBsIC0xOS4wNjIsLTIxLjI2NiBjIC0xLjA5NCwtMS4wOTQgLTEuMDk0LC0xLjI4MSAtMS4wOTQsLTMuNjcyIGwgMzYuODU5LDAgMi43ODEsMTcuMjgxIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQgLTEuMjAzLC03LjM0MyAtMi4xODcsLTguODQzIC0wLjcwNCwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQzOCwtMC43ODIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NzkuMjAzLDU2MS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NTkuODU5LDYzNy43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDYyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY0NC42NTYsNTM5LjU0NyBjIDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzNywxLjI4MSAtMS4yOTcsMCAtMS40MzgsLTAuNDIyIC0yLjE1NiwtMi44NTkgLTMuNzM1LC0xMy4wNzggLTkuNjI1LC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzM0LDAgLTMuNzM0LDAuNDM3IC0zLjczNCw0LjczNCAwLDMuODkxIDEuNzE5LDguMTg3IDMuMjk3LDEyLjUgbCAxMC4wNjIsMjYuNzE5IGMgMC40MjIsMS4xNTYgMS40MzgsMy43MzQgMS40MzgsNi40NjggMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMDYyIDguOTA2LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsLTAuMTU2IDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE2LC0xMS42MjUgbCAtMTAuMDYyLC0yNi43MzQgYyAtMC44NiwtMi4yOTcgLTEuNzE5LC00LjU5NCAtMS43MTksLTcuMTcyIDAsLTYuNDY5IDQuNDUzLC0xMS42NCAxMS4zNDQsLTExLjY0IDEzLjIxOCwwIDE4LjM5LDIwLjk2OCAxOC4zOSwyMS45ODQgeiBtIC0xLjE1Niw2OS4wOTQgYyAwLDIuMTU2IC0xLjcxOSw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyLDAgLTcuMDQ3LC0zLjE1NiAtNy4wNDcsLTYuODkxIDAsLTMuNTkzIDMuMDE2LC00LjczNCA0Ljc1LC00LjczNCAzLjg3NSwwIDcuMTcyLDMuNzM0IDcuMTcyLDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODE5LjMxMyw1NTIuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAyMy4yMyw1MzYuMDk0IGMgLTAuNzEsLTIuNDM4IC0wLjcxLC0yLjczNSAtMi43MSwtNS40NTMgLTMuMTgsLTQuMDMyIC05LjQ5LC0xMC4yMDMgLTE2LjI0LC0xMC4yMDMgLTUuODg5LDAgLTkuMjAyLDUuMzEyIC05LjIwMiwxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xOTIsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMywxNS4yMzQgOS40OCwwIDExLjM2LC0xMS43ODEgMTEuMzYsLTEyLjkzNyAwLC0wLjE0MSAtMC40NCwtMiAtMC41OCwtMi4yOTcgbCAtNy4wNSwtMjguMTU2IHogbSA5LjIxLDM2Ljc4MSBjIC0xLjU4LDMuNzM0IC01LjQ3LDkuNDg0IC0xMi45NCw5LjQ4NCAtMTYuMjMsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwNjUuNjEsNTA1LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMTE2LjYxLDUwNS42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIyMC44Niw2MzcuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjA4LjI4LDU2NC41NDcgYyAwLjU4LDIuMjk3IDAuNTgsNC4yOTcgMC41OCw0Ljg3NSAwLDguMzI4IC02LjE5LDEyLjkzNyAtMTIuNjQsMTIuOTM3IC0xNC41MiwwIC0yMi4yNywtMjAuOTg0IC0yMi4yNywtMjEuOTg0IDAsLTAuNzE5IDAuNTcsLTEuMjk3IDEuNDMsLTEuMjk3IDEuMTUsMCAxLjI5LDAuNTc4IDIuMDEsMi4wMTYgNS43NSwxMy45MzcgMTIuOTQsMTguMzkgMTguMzksMTguMzkgMy4wMiwwIDQuNiwtMS41NzggNC42LC02LjYwOSAwLC0zLjQ1MyAtMC40MywtNC44OTEgLTEsLTcuNDY5IGwgLTEzLjY2LC01NC4xNTYgYyAtMi43MiwtMTAuNjQxIC05LjQ3LC0xOC42ODcgLTE3LjM4LC0xOC42ODcgLTAuNTcsMCAtMy41OSwwIC02LjMyLDEuNDM3IDMuNDUsMC43MTkgNi4xOCwzLjQ1MyA2LjE4LDYuOTA2IDAsMi4yOTcgLTEuNzMsNC41OTQgLTQuODksNC41OTQgLTMuNzMsMCAtNy4xOCwtMy4xNzIgLTcuMTgsLTcuNDY5IDAsLTUuODkgNi4zMiwtOC4zNDMgMTIuMjEsLTguMzQzIDkuOTEsMCAyMi45OSw3LjMyOCAyNi41OCwyMS43MDMgbCAxMy4zNiw1My4xNTYgeiBtIDUuODksNDQuMDk0IGMgMCwzLjU5MyAtMy4wMSw0LjczNCAtNC43NSw0LjczNCAtMy44NywwIC03LjE3LC0zLjczNCAtNy4xNywtNi44OTEgMCwtMi4xNTYgMS43MiwtNC43MzQgNC44OCwtNC43MzQgMy4zMSwwIDcuMDQsMy4xNTYgNy4wNCw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyNTIuMDIsNTE4LjQyMiBjIDAsOC4zMjggLTIuNzQsMTQuNTE2IC04LjYzLDE0LjUxNiAtNC41OSwwIC02Ljg5LC0zLjczNSAtNi44OSwtNi44OTEgMCwtMy4xNzIgMi4xNiwtNy4wNDcgNy4wMywtNy4wNDcgMS44OCwwIDMuNDUsMC41NzggNC43NSwxLjg3NSAwLjI4LDAuMjgxIDAuNDIsMC4yODEgMC41OCwwLjI4MSAwLjI4LDAgMC4yOCwtMi4wMTUgMC4yOCwtMi43MzQgMCwtNC43MzQgLTAuODYsLTE0LjA3OCAtOS4xOSwtMjMuNDA2IC0xLjU5LC0xLjczNSAtMS41OSwtMi4wMTYgLTEuNTksLTIuMzEzIDAsLTAuNzAzIDAuNzIsLTEuNDIyIDEuNDQsLTEuNDIyIDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODkuODU5NCwzOTIuNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcxLDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTU2LDIuNzE5IC00LjAzMTMsMi43MzQgLTUuMDMxMyw2LjYwOSAtNS40Njg4LDguMzI4IC0wLjQyMTgsMS4xNTYgLTAuODU5MywyLjg3NSAtMi44NTkzLDIuODc1IC0wLjg3NSwwIC0yLjU5MzgsLTAuNTYzIC0yLjU5MzgsLTIuNzE5IDAsLTEuMjk3IDAuODU5NCwtNC43NSAzLjU5MzgsLTguNjI1IGwgLTQ4LjI2NTcsMCBjIC0yLjQ1MzEsMCAtNC44OTA2LDAgLTQuODkwNiwtMi43MzQgMCwtMi41NzggMi41OTM4LC0yLjU3OCA0Ljg5MDYsLTIuNTc4IGwgNDUuOTY4OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzYuNjU2MywyOTUuNTQ3IGMgMCwwLjcxOSAtMC41NzgyLDEuMjgxIC0xLjQzNzUsMS4yODEgLTEuMjk2OSwwIC0xLjQzNzUsLTAuNDIyIC0yLjE1NjMsLTIuODU5IC0zLjczNDQsLTEzLjA3OCAtOS42MjUsLTE3LjUzMSAtMTQuMzU5NCwtMTcuNTMxIC0xLjczNDMsMCAtMy43MzQzLDAuNDM3IC0zLjczNDMsNC43MzQgMCwzLjg5MSAxLjcxODcsOC4xODcgMy4yOTY4LDEyLjUgbCAxMC4wNjI1LDI2LjcxOSBjIDAuNDIxOSwxLjE1NiAxLjQzNzUsMy43MzQgMS40Mzc1LDYuNDY4IDAsNi4wMzIgLTQuMzEyNSwxMS41IC0xMS4zNTkzLDExLjUgLTEzLjIxODgsMCAtMTguNTMxMywtMjAuODQzIC0xOC41MzEzLC0yMS45ODQgMCwtMC41NzggMC41NzgxLC0xLjI5NyAxLjU3ODEsLTEuMjk3IDEuMjk2OSwwIDEuNDM3NSwwLjU3OCAyLjAxNTcsMi41OTQgMy40NTMxLDEyLjA2MiA4LjkwNjIsMTcuODEyIDE0LjUxNTYsMTcuODEyIDEuMjgxMiwwIDMuNzM0NCwtMC4xNTYgMy43MzQ0LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE1NywtMTEuNjI1IEwgNDguNjQwNiwyOTIuMzc1IGMgLTAuODU5MywtMi4yOTcgLTEuNzE4NywtNC41OTQgLTEuNzE4NywtNy4xNzIgMCwtNi40NjkgNC40NTMxLC0xMS42NCAxMS4zNDM3LC0xMS42NCAxMy4yMTg4LDAgMTguMzkwNywyMC45NjggMTguMzkwNywyMS45ODQgeiBNIDc1LjUsMzY0LjY0MSBjIDAsMi4xNTYgLTEuNzE4Nyw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyNSwwIC03LjA0NjksLTMuMTU2IC03LjA0NjksLTYuODkxIDAsLTMuNTkzIDMuMDE1NywtNC43MzQgNC43NSwtNC43MzQgMy44NzUsMCA3LjE3MTksMy43MzQgNy4xNzE5LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzA0Ljk2OSwzMjEuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDg0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ1MC4xODgsMzcxLjEwOSBjIDAuMTQsMC41NzkgMC40MjEsMS40MzggMC40MjEsMi4xNTcgMCwxLjQzNyAtMS40MzcsMS40MzcgLTEuNzE4LDEuNDM3IC0wLjE0MSwwIC01LjMxMywtMC40MzcgLTcuOTA3LC0wLjcxOSAtMi40MzcsLTAuMTU2IC00LjU5MywtMC40MzcgLTcuMTcxLC0wLjU3OCAtMy40NTQsLTAuMjgxIC00LjQ1NCwtMC40MzcgLTQuNDU0LC0zLjAxNSAwLC0xLjQzOCAxLjQzOCwtMS40MzggMi44NzUsLTEuNDM4IDcuMzEzLDAgNy4zMTMsLTEuMjk3IDcuMzEzLC0yLjczNCAwLC0xIC0xLjE0MSwtNS4xNzIgLTEuNzE5LC03Ljc1IGwgLTMuNDUzLC0xMy43OTcgYyAtMS40MjIsLTUuNzUgLTkuNjI1LC0zOC4zNTkgLTEwLjE4NywtNDAuOTM4IC0wLjcxOSwtMy41OTMgLTAuNzE5LC02LjAzMSAtMC43MTksLTcuOTA2IDAsLTE0LjY1NiA4LjE4NywtMjIuMjY1IDE3LjUxNSwtMjIuMjY1IDE2LjY3MiwwIDMzLjkwNywyMS40MDYgMzMuOTA3LDQyLjIzNCAwLDEzLjIxOSAtNy40NjksMjIuNTYyIC0xOC4yMzUsMjIuNTYyIC03LjQ4NCwwIC0xNC4yMzQsLTYuMTg3IC0xNi45NTMsLTkuMDYyIGwgMTAuNDg1LDQxLjgxMiB6IG0gLTkuMDQ3LC05NC42NzEgYyAtNC42MSwwIC05LjYyNSwzLjQ1MyAtOS42MjUsMTQuNjU2IDAsNC43MzQgMC40MjIsNy40NjkgMy4wMTUsMTcuNTE1IDAuNDIyLDEuODc1IDIuNzE5LDExLjA2MyAzLjI5NywxMi45MzggMC4yOTcsMS4xNDEgOC43NjYsMTMuOTM3IDE4LjUzMSwxMy45MzcgNi4zMjksMCA5LjIwNCwtNi4zMjggOS4yMDQsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMzIsLTIzLjEyNSAtNy42MjUsLTMwLjU5NCAtMy41OTQsLTcuNzY2IC0xMC4xODgsLTE0LjY1NiAtMTYuNzk3LC0xNC42NTYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1MDYuMjAzLDMxNi41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NTcuMjAzLDMxNi41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NTIuODU5LDM5NC43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDYyMi42NTYsMjk1LjU0NyBjIDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzNywxLjI4MSAtMS4yOTcsMCAtMS40MzgsLTAuNDIyIC0yLjE1NiwtMi44NTkgLTMuNzM1LC0xMy4wNzggLTkuNjI1LC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzM0LDAgLTMuNzM0LDAuNDM3IC0zLjczNCw0LjczNCAwLDMuODkxIDEuNzE5LDguMTg3IDMuMjk3LDEyLjUgbCAxMC4wNjIsMjYuNzE5IGMgMC40MjIsMS4xNTYgMS40MzgsMy43MzQgMS40MzgsNi40NjggMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMDYyIDguOTA2LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsLTAuMTU2IDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE2LC0xMS42MjUgbCAtMTAuMDYyLC0yNi43MzQgYyAtMC44NiwtMi4yOTcgLTEuNzE5LC00LjU5NCAtMS43MTksLTcuMTcyIDAsLTYuNDY5IDQuNDUzLC0xMS42NCAxMS4zNDQsLTExLjY0IDEzLjIxOCwwIDE4LjM5LDIwLjk2OCAxOC4zOSwyMS45ODQgeiBtIC0xLjE1Niw2OS4wOTQgYyAwLDIuMTU2IC0xLjcxOSw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyLDAgLTcuMDQ3LC0zLjE1NiAtNy4wNDcsLTYuODkxIDAsLTMuNTkzIDMuMDE2LC00LjczNCA0Ljc1LC00LjczNCAzLjg3NSwwIDcuMTcyLDMuNzM0IDcuMTcyLDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjU1LjEyNSwzNjQuMTg4IGMgMC41LDEuMTg3IDAuOTA2LDIuMDc4IDAuOTA2LDMuMDc4IDAsMi44NzUgLTIuNTkzLDUuMjY1IC01LjY3Miw1LjI2NSAtMi43ODEsMCAtNC41NjIsLTEuODkgLTUuMjY1LC00LjQ2OCBsIC0xMS44MTMsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQwNiwtMS4yOTcgLTAuNDA2LC0xLjM5IDAsLTEuMDk0IDIuNTk0LC0xLjc5NyAzLjM5MSwtMS43OTcgMC41OTMsMCAwLjY4NywwLjI5NyAxLjI4MSwxLjU5NCBsIDE3LjU3OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MTkuMzEzLDMwOC4xODggMzkuNjU2LDAgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNCAtMi40MzgsMi43MzQgLTQuNTk0LDIuNzM0IGwgLTM5LjY1NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTc5LDQuNTk0IC0yLjczNCwwIC0yLjczNCwtMi40NTMgLTIuNzM0LC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4IDAsLTIuNzM0IDIuNDUzLC0yLjczNCA0LjYwOSwtMi43MzQgbCAzOS42NDEsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTk0LC00LjU5MyAyLjcxOSwwIDIuNzE5LDIuNDM3IDIuNzE5LDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDAzLjE5LDM3MS4xMDkgYyAwLjE0LDAuNTc5IDAuNDIsMS40MzggMC40MiwyLjE1NyAwLDEuNDM3IC0xLjQ0LDEuNDM3IC0xLjcyLDEuNDM3IC0wLjE0LDAgLTUuMzEyLC0wLjQzNyAtNy45MDYsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NSAtOS42MjUsLTM4LjM1OSAtMTAuMTg3LC00MC45MzggLTAuNzE5LC0zLjU5MyAtMC43MTksLTYuMDMxIC0wLjcxOSwtNy45MDYgMCwtMTQuNjU2IDguMTg3LC0yMi4yNjUgMTcuNTE1LC0yMi4yNjUgMTYuNjc2LDAgMzMuOTA2LDIxLjQwNiAzMy45MDYsNDIuMjM0IDAsMTMuMjE5IC03LjQ3LDIyLjU2MiAtMTguMjMsMjIuNTYyIC03LjQ5LDAgLTE0LjIzOCwtNi4xODcgLTE2Ljk1NywtOS4wNjIgbCAxMC40ODcsNDEuODEyIHogbSAtOS4wNDksLTk0LjY3MSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzIC05LjYyNSwxNC42NTYgMCw0LjczNCAwLjQyMiw3LjQ2OSAzLjAxNSwxNy41MTUgMC40MjIsMS44NzUgMi43MTksMTEuMDYzIDMuMjk3LDEyLjkzOCAwLjI5NywxLjE0MSA4Ljc2NiwxMy45MzcgMTguNTMyLDEzLjkzNyA2LjMzLDAgOS4yLC02LjMyOCA5LjIsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMywtMjMuMTI1IC03LjYyLC0zMC41OTQgLTMuNiwtNy43NjYgLTEwLjE5LC0xNC42NTYgLTE2Ljc5OSwtMTQuNjU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTAwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwNTkuMiwzMTYuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4LDIuNTc4IC02LjE1LC02LjM1OSAtMTQuOSwtNi4zNTkgLTE4LjA4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjMsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3LDAgMCwtMy4wNzggYyAzLjQ3LDAuMjk3IDEyLjEyLDAuMjk3IDE2LjA5LDAuMjk3IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk3IGwgMCwzLjA3OCAtMy4xOSwwIGMgLTguOTQsMCAtOS4yNCwxLjA5NCAtOS4yNCw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTAyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwOTMuNjEsMjYwLjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIxNC44NiwzOTQuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE4NS4yOCwzMjAuNTQ3IGMgMC41OCwyLjI5NyAwLjU4LDQuMjk3IDAuNTgsNC44NzUgMCw4LjMyOCAtNi4xOSwxMi45MzcgLTEyLjY0LDEyLjkzNyAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NCAtMjIuMjcsLTIxLjk4NCAwLC0wLjcxOSAwLjU3LC0xLjI5NyAxLjQzLC0xLjI5NyAxLjE1LDAgMS4yOSwwLjU3OCAyLjAxLDIuMDE2IDUuNzUsMTMuOTM3IDEyLjk0LDE4LjM5IDE4LjM5LDE4LjM5IDMuMDIsMCA0LjYsLTEuNTc4IDQuNiwtNi42MDkgMCwtMy40NTMgLTAuNDMsLTQuODkxIC0xLC03LjQ2OSBsIC0xMy42NiwtNTQuMTU2IGMgLTIuNzIsLTEwLjY0MSAtOS40NywtMTguNjg3IC0xNy4zOCwtMTguNjg3IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNyAzLjQ1LDAuNzE5IDYuMTgsMy40NTMgNi4xOCw2LjkwNiAwLDIuMjk3IC0xLjczLDQuNTk0IC00Ljg5LDQuNTk0IC0zLjczLDAgLTcuMTgsLTMuMTcyIC03LjE4LC03LjQ2OSAwLC01Ljg5IDYuMzIsLTguMzQzIDEyLjIxLC04LjM0MyA5LjkxLDAgMjIuOTksNy4zMjggMjYuNTgsMjEuNzAzIGwgMTMuMzYsNTMuMTU2IHogbSA1Ljg5LDQ0LjA5NCBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIyNi4xMywzNjQuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNCwtMS4yOTcgLTAuNCwtMS4zOSAwLC0xLjA5NCAyLjU5LC0xLjc5NyAzLjM5LC0xLjc5NyAwLjU5LDAgMC42OCwwLjI5NyAxLjI4LDEuNTk0IGwgMTcuNTgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTEwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyNjEuMDIsMjc0LjQyMiBjIDAsOC4zMjggLTIuNzQsMTQuNTE2IC04LjYzLDE0LjUxNiAtNC41OSwwIC02Ljg5LC0zLjczNSAtNi44OSwtNi44OTEgMCwtMy4xNzIgMi4xNiwtNy4wNDcgNy4wMywtNy4wNDcgMS44OCwwIDMuNDUsMC41NzggNC43NSwxLjg3NSAwLjI4LDAuMjgxIDAuNDIsMC4yODEgMC41OCwwLjI4MSAwLjI4LDAgMC4yOCwtMi4wMTUgMC4yOCwtMi43MzQgMCwtNC43MzQgLTAuODYsLTE0LjA3OCAtOS4xOSwtMjMuNDA2IC0xLjU5LC0xLjczNSAtMS41OSwtMi4wMTYgLTEuNTksLTIuMzEzIDAsLTAuNzAzIDAuNzIsLTEuNDIyIDEuNDQsLTEuNDIyIDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTEyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg5Ljg1OTQsMTQ3Ljc2NiBjIC0xLjczNDQsLTEuNTc4IC03LjA0NjksLTYuNjEgLTcuMDQ2OSwtOC42MjUgMCwtMS40MzggMS4yOTY5LC0yLjcxOSAyLjczNDQsLTIuNzE5IDEuMjk2OSwwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzMSw0LjI5NyA3LjMyODEsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3MSwwLjg1OSAyLjQ1MzEsMS4yODEgMi40NTMxLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDExNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3Ni4yODEzLDc1LjU0NjkgYyAwLjU3ODEsMi4yOTY5IDAuNTc4MSw0LjI5NjkgMC41NzgxLDQuODc1IDAsOC4zMjgxIC02LjE4NzUsMTIuOTM3NSAtMTIuNjQwNiwxMi45Mzc1IC0xNC41MTU3LDAgLTIyLjI2NTcsLTIwLjk4NDQgLTIyLjI2NTcsLTIxLjk4NDQgMCwtMC43MTg3IDAuNTYyNSwtMS4yOTY5IDEuNDIxOSwtMS4yOTY5IDEuMTU2MywwIDEuMjk2OSwwLjU3ODIgMi4wMTU2LDIuMDE1NyA1Ljc1LDEzLjkzNzUgMTIuOTM3NSwxOC4zOTA2IDE4LjM5MDcsMTguMzkwNiAzLjAxNTYsMCA0LjU5MzcsLTEuNTc4MSA0LjU5MzcsLTYuNjA5NCAwLC0zLjQ1MzEgLTAuNDIxOSwtNC44OTA2IC0xLC03LjQ2ODcgTCA1My43MTg4LDIyLjI1IEMgNTEsMTEuNjA5NCA0NC4yNSwzLjU2MjUgMzYuMzQzOCwzLjU2MjUgYyAtMC41NzgyLDAgLTMuNTkzOCwwIC02LjMyODIsMS40Mzc1IDMuNDUzMiwwLjcxODc1IDYuMTg3NSwzLjQ1MzEzIDYuMTg3NSw2LjkwNjMgMCwyLjI5NjggLTEuNzM0Myw0LjU5MzcgLTQuODkwNiw0LjU5MzcgLTMuNzM0NCwwIC03LjE4NzUsLTMuMTcxOSAtNy4xODc1LC03LjQ2ODc1IDAsLTUuODkwNjIgNi4zMjgxLC04LjM0Mzc1IDEyLjIxODgsLTguMzQzNzUgOS45MDYyLDAgMjIuOTg0Myw3LjMyODEzIDI2LjU3ODEsMjEuNzAzMSBsIDEzLjM1OTQsNTMuMTU2MyB6IG0gNS44OTA2LDQ0LjA5NDEgYyAwLDMuNTkzIC0zLjAxNTYsNC43MzQgLTQuNzUsNC43MzQgLTMuODc1LDAgLTcuMTcxOSwtMy43MzQgLTcuMTcxOSwtNi44OTEgMCwtMi4xNTYgMS43MTg4LC00LjczNCA0Ljg3NSwtNC43MzQgMy4zMTI1LDAgNy4wNDY5LDMuMTU2IDcuMDQ2OSw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDExNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzMDQuOTY5LDc2LjU0NjkgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzgxIDAsMi43MzQ0IC0yLjQzOCwyLjczNDQgLTQuNTk0LDIuNzM0NCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3ODEgMCwtMi43MzQ0IDIuNDUzLC0yLjczNDQgNC42MDksLTIuNzM0NCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxODggYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzgyIDAsMi43MzQzIC0yLjQzOCwyLjczNDMgLTQuNTk0LDIuNzM0MyBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5MzcgMCwtMi43MTg4IDIuNDUzLC0yLjcxODggNC42MDksLTIuNzE4OCBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDUwLjE4OCwxMjYuMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NzEgYyAtMS40MjIsLTUuNzUgLTkuNjI1LC0zOC4zNTk0IC0xMC4xODcsLTQwLjkzNzUgLTAuNzE5LC0zLjU5MzggLTAuNzE5LC02LjAzMTMgLTAuNzE5LC03LjkwNjMgMCwtMTQuNjU2MiA4LjE4NywtMjIuMjY1NiAxNy41MTUsLTIyLjI2NTYgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNjMgMzMuOTA3LDQyLjIzNDQgMCwxMy4yMTg3IC03LjQ2OSwyMi41NjI1IC0xOC4yMzUsMjIuNTYyNSAtNy40ODQsMCAtMTQuMjM0LC02LjE4NzUgLTE2Ljk1MywtOS4wNjI1IGwgMTAuNDg1LDQxLjgxMjEgeiBtIC05LjA0NywtOTQuNjcxNSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzMSAtOS42MjUsMTQuNjU2MyAwLDQuNzM0MyAwLjQyMiw3LjQ2ODcgMy4wMTUsMTcuNTE1NiAwLjQyMiwxLjg3NSAyLjcxOSwxMS4wNjI1IDMuMjk3LDEyLjkzNzUgMC4yOTcsMS4xNDA2IDguNzY2LDEzLjkzNzUgMTguNTMxLDEzLjkzNzUgNi4zMjksMCA5LjIwNCwtNi4zMjgxIDkuMjA0LC0xMy43OTY5IDAsLTYuODkwNiAtNC4wMzIsLTIzLjEyNSAtNy42MjUsLTMwLjU5MzcgLTMuNTk0LC03Ljc2NTcgLTEwLjE4OCwtMTQuNjU2MyAtMTYuNzk3LC0xNC42NTYzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ4OS42MDksMTUuNjU2MyAxMC41MzIsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NjgsMTkuMDc4MSAyMS40NjgsMjkuMDE1NiAwLDExLjMyODIgLTguOTUzLDE5LjI2NTcgLTIxLjA2MiwxOS4yNjU3IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0MDcgLTE4LjU3OCwtMTcuOTg0NCAwLC01LjU2MjUgNC45NjksLTUuNTYyNSA1LjI2NSwtNS41NjI1IDEuNjg4LDAgNS4xNTcsMS4yMDMxIDUuMTU3LDUuMjY1NiAwLDIuNTkzOCAtMS43ODIsNS4xNzE5IC01LjI2Niw1LjE3MTkgLTAuNzgxLDAgLTAuOTg0LDAgLTEuMjgxLC0wLjA5MzggMi4yODEsNi40NTMyIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ2OCAxMy4zMTMsLTE2LjE4NzUgMCwtNy45NTMxIC00Ljk2OSwtMTUuNzk2OCAtMTAuNDM4LC0yMS45NTMxIEwgNDgzLjA2MywxMS42NzE5IEMgNDgxLjk2OSwxMC41NzgxIDQ4MS45NjksMTAuMzkwNiA0ODEuOTY5LDggbCAzNi44NTksMCAyLjc4MSwxNy4yODEzIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIwMywtNy4zNDM4IC0yLjE4NywtOC44NDM4IC0wLjcwNCwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDM4LC0wLjc4MTIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTU3LjIwMyw3MS41NzgxIGMgMCwyLjM3NSAwLDIuNTc4MiAtMi4yODEsMi41NzgyIC02LjE1NiwtNi4zNTk0IC0xNC45MDYsLTYuMzU5NCAtMTguMDc4LC02LjM1OTQgbCAwLC0zLjA3ODEgYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4MSBsIDAsLTUxLjQ1MzEgYyAwLC0zLjU3ODIgLTAuMjk2LC00Ljc2NTcgLTkuMjUsLTQuNzY1NyBsIC0zLjE3MSwwIDAsLTMuMDc4MSBjIDMuNDY4LDAuMjk2ODggMTIuMTI1LDAuMjk2ODggMTYuMDkzLDAuMjk2ODggMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTY4OCBsIDAsMy4wNzgxIC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDkzOCAtOS4yMzUsNC43NjU3IGwgMCw1NS43MzQzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY1Mi44NTksMTUwLjc2NiBjIC0xLjczNCwtMS41NzggLTcuMDQ2LC02LjYxIC03LjA0NiwtOC42MjUgMCwtMS40MzggMS4yOTYsLTIuNzE5IDIuNzM0LC0yLjcxOSAxLjI5NywwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzLDQuMjk3IDcuMzI4LDcuMDMxIDEwLjYyNSw4LjkwNiAxLjQzNywwLjg1OSAyLjQ1MywxLjI4MSAyLjQ1MywyLjg3NSAwLDEuMjgxIC0xLjE1NiwyIC0yLjAxNiwyLjcxOSAtNC4wMzEsMi43MzQgLTUuMDMxLDYuNjA5IC01LjQ2OCw4LjMyOCAtMC40MjIsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODc1LDAgLTIuNTkzLC0wLjU2MyAtMi41OTMsLTIuNzE5IDAsLTEuMjk3IDAuODU5LC00Ljc1IDMuNTkzLC04LjYyNSBsIC00OC4yNjUsMCBjIC0yLjQ1MywwIC00Ljg5MSwwIC00Ljg5MSwtMi43MzQgMCwtMi41NzggMi41OTQsLTIuNTc4IDQuODkxLC0yLjU3OCBsIDQ1Ljk2OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDYyMi42NTYsNTAuNTQ2OSBjIDAsMC43MTg3IC0wLjU3OCwxLjI4MTIgLTEuNDM3LDEuMjgxMiAtMS4yOTcsMCAtMS40MzgsLTAuNDIxOCAtMi4xNTYsLTIuODU5MyAtMy43MzUsLTEzLjA3ODIgLTkuNjI1LC0xNy41MzEzIC0xNC4zNiwtMTcuNTMxMyAtMS43MzQsMCAtMy43MzQsMC40Mzc1IC0zLjczNCw0LjczNDQgMCwzLjg5MDYgMS43MTksOC4xODc1IDMuMjk3LDEyLjUgbCAxMC4wNjIsMjYuNzE4NyBjIDAuNDIyLDEuMTU2MyAxLjQzOCwzLjczNDQgMS40MzgsNi40Njg4IDAsNi4wMzEyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDM4IC0xOC41MzEsLTIxLjk4NDQgMCwtMC41NzgxIDAuNTc4LC0xLjI5NjkgMS41NzgsLTEuMjk2OSAxLjI5NywwIDEuNDM4LDAuNTc4MiAyLjAxNiwyLjU5MzggMy40NTMsMTIuMDYyNSA4LjkwNiwxNy44MTI1IDE0LjUxNSwxNy44MTI1IDEuMjgyLDAgMy43MzUsLTAuMTU2MyAzLjczNSwtNC43NSAwLC0zLjczNDQgLTEuODc1LC04LjQ2ODggLTMuMDE2LC0xMS42MjUgTCA1OTQuNjQxLDQ3LjM3NSBjIC0wLjg2LC0yLjI5NjkgLTEuNzE5LC00LjU5MzcgLTEuNzE5LC03LjE3MTkgMCwtNi40Njg3IDQuNDUzLC0xMS42NDA2IDExLjM0NCwtMTEuNjQwNiAxMy4yMTgsMCAxOC4zOSwyMC45Njg4IDE4LjM5LDIxLjk4NDQgeiBNIDYyMS41LDExOS42NDEgYyAwLDIuMTU2IC0xLjcxOSw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyLDAgLTcuMDQ3LC0zLjE1NiAtNy4wNDcsLTYuODkxIDAsLTMuNTkzIDMuMDE2LC00LjczNCA0Ljc1LC00LjczNCAzLjg3NSwwIDcuMTcyLDMuNzM0IDcuMTcyLDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY1NS4xMjUsMTE5LjE4OCBjIDAuNSwxLjE4NyAwLjkwNiwyLjA3OCAwLjkwNiwzLjA3OCAwLDIuODc1IC0yLjU5Myw1LjI2NSAtNS42NzIsNS4yNjUgLTIuNzgxLDAgLTQuNTYyLC0xLjg5IC01LjI2NSwtNC40NjggTCA2MzMuMjgxLDc5LjY1NjMgYyAwLC0wLjIwMzIgLTAuNDA2LC0xLjI5NjkgLTAuNDA2LC0xLjM5MDcgMCwtMS4wOTM3IDIuNTk0LC0xLjc5NjggMy4zOTEsLTEuNzk2OCAwLjU5MywwIDAuNjg3LDAuMjk2OCAxLjI4MSwxLjU5MzcgbCAxNy41NzgsNDEuMTI1NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MTkuMzEzLDYzLjE4NzUgMzkuNjU2LDAgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzgxIDAsMi43MzQ0IC0yLjQzOCwyLjczNDQgLTQuNTk0LDIuNzM0NCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3ODEgMCwtMi43MzQ0IDIuNDUzLC0yLjczNDQgNC42MDksLTIuNzM0NCBsIDM5LjY0MSwwIDAsLTM5LjY1NjIgYyAwLC0yIDAsLTQuNTkzOCAyLjU5NCwtNC41OTM4IDIuNzE5LDAgMi43MTksMi40Mzc1IDIuNzE5LDQuNTkzOCBsIDAsMzkuNjU2MiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDAzLjE5LDEyNi4xMDkgYyAwLjE0LDAuNTc5IDAuNDIsMS40MzggMC40MiwyLjE1NyAwLDEuNDM3IC0xLjQ0LDEuNDM3IC0xLjcyLDEuNDM3IC0wLjE0LDAgLTUuMzEyLC0wLjQzNyAtNy45MDYsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NzEgYyAtMS40MjIsLTUuNzUgLTkuNjI1LC0zOC4zNTk0IC0xMC4xODcsLTQwLjkzNzUgLTAuNzE5LC0zLjU5MzggLTAuNzE5LC02LjAzMTMgLTAuNzE5LC03LjkwNjMgMCwtMTQuNjU2MiA4LjE4NywtMjIuMjY1NiAxNy41MTUsLTIyLjI2NTYgMTYuNjc2LDAgMzMuOTA2LDIxLjQwNjMgMzMuOTA2LDQyLjIzNDQgMCwxMy4yMTg3IC03LjQ3LDIyLjU2MjUgLTE4LjIzLDIyLjU2MjUgLTcuNDksMCAtMTQuMjM4LC02LjE4NzUgLTE2Ljk1NywtOS4wNjI1IGwgMTAuNDg3LDQxLjgxMjEgeiBtIC05LjA0OSwtOTQuNjcxNSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzMSAtOS42MjUsMTQuNjU2MyAwLDQuNzM0MyAwLjQyMiw3LjQ2ODcgMy4wMTUsMTcuNTE1NiAwLjQyMiwxLjg3NSAyLjcxOSwxMS4wNjI1IDMuMjk3LDEyLjkzNzUgMC4yOTcsMS4xNDA2IDguNzY2LDEzLjkzNzUgMTguNTMyLDEzLjkzNzUgNi4zMywwIDkuMiwtNi4zMjgxIDkuMiwtMTMuNzk2OSAwLC02Ljg5MDYgLTQuMDMsLTIzLjEyNSAtNy42MiwtMzAuNTkzNyAtMy42LC03Ljc2NTcgLTEwLjE5LC0xNC42NTYzIC0xNi43OTksLTE0LjY1NjMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTA0Mi42MSwxNS42NTYzIDEwLjUzLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDcsMTkuMDc4MSAyMS40NywyOS4wMTU2IDAsMTEuMzI4MiAtOC45NSwxOS4yNjU3IC0yMS4wNiwxOS4yNjU3IC0xMS4yNCwwIC0xOC41OCwtOS4xNDA3IC0xOC41OCwtMTcuOTg0NCAwLC01LjU2MjUgNC45NywtNS41NjI1IDUuMjYsLTUuNTYyNSAxLjY5LDAgNS4xNiwxLjIwMzEgNS4xNiw1LjI2NTYgMCwyLjU5MzggLTEuNzgsNS4xNzE5IC01LjI2LDUuMTcxOSAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDkzOCAyLjI5LDYuNDUzMiA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NjggMTMuMzEsLTE2LjE4NzUgMCwtNy45NTMxIC00Ljk3LC0xNS43OTY4IC0xMC40MywtMjEuOTUzMSBsIC0xOS4wNywtMjEuMjY1NiBjIC0xLjA5LC0xLjA5MzggLTEuMDksLTEuMjgxMyAtMS4wOSwtMy42NzE5IGwgMzYuODYsMCAyLjc4LDE3LjI4MTMgLTIuNDgsMCBjIC0wLjUsLTIuOTg0NCAtMS4yMSwtNy4zNDM4IC0yLjE5LC04Ljg0MzggLTAuNzEsLTAuNzgxMiAtNy4yNSwtMC43ODEyIC05LjQ0LC0wLjc4MTIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDkzLjYxLDE1LjY1NjMgMTAuNTMsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NywxOS4wNzgxIDIxLjQ3LDI5LjAxNTYgMCwxMS4zMjgyIC04Ljk1LDE5LjI2NTcgLTIxLjA2LDE5LjI2NTcgLTExLjI0LDAgLTE4LjU4LC05LjE0MDcgLTE4LjU4LC0xNy45ODQ0IDAsLTUuNTYyNSA0Ljk3LC01LjU2MjUgNS4yNiwtNS41NjI1IDEuNjksMCA1LjE2LDEuMjAzMSA1LjE2LDUuMjY1NiAwLDIuNTkzOCAtMS43OCw1LjE3MTkgLTUuMjYsNS4xNzE5IC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTM4IDIuMjksNi40NTMyIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ2OCAxMy4zMSwtMTYuMTg3NSAwLC03Ljk1MzEgLTQuOTcsLTE1Ljc5NjggLTEwLjQzLC0yMS45NTMxIGwgLTE5LjA3LC0yMS4yNjU2IGMgLTEuMDksLTEuMDkzOCAtMS4wOSwtMS4yODEzIC0xLjA5LC0zLjY3MTkgbCAzNi44NiwwIDIuNzgsMTcuMjgxMyAtMi40OCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIxLC03LjM0MzggLTIuMTksLTguODQzOCAtMC43MSwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDQsLTAuNzgxMiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTM4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMTQuODYsMTUwLjc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExODUuMjgsNzUuNTQ2OSBjIDAuNTgsMi4yOTY5IDAuNTgsNC4yOTY5IDAuNTgsNC44NzUgMCw4LjMyODEgLTYuMTksMTIuOTM3NSAtMTIuNjQsMTIuOTM3NSAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NDQgLTIyLjI3LC0yMS45ODQ0IDAsLTAuNzE4NyAwLjU3LC0xLjI5NjkgMS40MywtMS4yOTY5IDEuMTUsMCAxLjI5LDAuNTc4MiAyLjAxLDIuMDE1NyA1Ljc1LDEzLjkzNzUgMTIuOTQsMTguMzkwNiAxOC4zOSwxOC4zOTA2IDMuMDIsMCA0LjYsLTEuNTc4MSA0LjYsLTYuNjA5NCAwLC0zLjQ1MzEgLTAuNDMsLTQuODkwNiAtMSwtNy40Njg3IEwgMTE2Mi43MiwyMi4yNSBDIDExNjAsMTEuNjA5NCAxMTUzLjI1LDMuNTYyNSAxMTQ1LjM0LDMuNTYyNSBjIC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNzUgMy40NSwwLjcxODc1IDYuMTgsMy40NTMxMyA2LjE4LDYuOTA2MyAwLDIuMjk2OCAtMS43Myw0LjU5MzcgLTQuODksNC41OTM3IC0zLjczLDAgLTcuMTgsLTMuMTcxOSAtNy4xOCwtNy40Njg3NSAwLC01Ljg5MDYyIDYuMzIsLTguMzQzNzUgMTIuMjEsLTguMzQzNzUgOS45MSwwIDIyLjk5LDcuMzI4MTMgMjYuNTgsMjEuNzAzMSBsIDEzLjM2LDUzLjE1NjMgeiBtIDUuODksNDQuMDk0MSBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIyNi4xMywxMTkuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA2NyBjIDAsLTAuMjAzMiAtMC40LC0xLjI5NjkgLTAuNCwtMS4zOTA3IDAsLTEuMDkzNyAyLjU5LC0xLjc5NjggMy4zOSwtMS43OTY4IDAuNTksMCAwLjY4LDAuMjk2OCAxLjI4LDEuNTkzNyBsIDE3LjU4LDQxLjEyNTUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTI1OS40NCwzNi44OTA2IGMgMCw0LjE3MTkgLTMuNDYsNy4wNDY5IC02LjkxLDcuMDQ2OSAtNC4xNSwwIC03LjAzLC0zLjQ1MzEgLTcuMDMsLTYuODkwNiAwLC00LjE3MTkgMy40NSwtNy4wNDY5IDYuODksLTcuMDQ2OSA0LjE3LDAgNy4wNSwzLjQ1MzEgNy4wNSw2Ljg5MDYiIC8+PC9nPjwvZz48L3N2Zz4=)
 и
и  , которые зависят только от старой и новой систем
координат, запишем в матрицы
, которые зависят только от старой и новой систем
координат, запишем в матрицы  и
и  :
:

![\begin{array}{lccccc}\vec{v}&=&v'_x\vec{i'}+v'_y\vec{j'}=&&\\[2mm]
&=&v'_x(a_{11}\vec{i}+a_{12}\vec{j})&+&v'_y(a_{21}\vec{i}+a_{22}\vec{j})&=\\[2mm]
&=&(a_{11}v'_x+a_{21}v'_y)\vec{i}&+&(a_{12}v'_x+a_{22}v'_y)\vec{j}&=\\[2mm]
&&&=&v_x\vec{i}+v_y\vec{j}.&\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDI4MCA5MiIKICAgaGVpZ2h0PSI5MiIKICAgd2lkdGg9IjI4MCIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDkyKSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzEuODU5NCw4NTkuNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40Mzc1LDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYyLDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY2LjY1NjMsODI3LjczNCBjIDAsOS4wNDcgLTQuNjA5NCw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMyLDAgLTYuNjA5NCwtMy40NTMgLTYuNjA5NCwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgxLC0zLjI5NyAxLjQzNzUsLTEuMjk2IDUuMTcxOSwtNS4xNzEgNS4xNzE5LC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5NCwtMzkuNjQgLTguNzY1NiwwIC0xMC40ODQ0LDcuMzI4IC0xMC40ODQ0LDEyLjY0IDAsNy4xODggMy4yOTY5LDE3LjIzNSA3LjE4NzUsMjcuNTc4IDIuMjk2OSw1Ljg5MSAyLjg3NSw3LjMyOCAyLjg3NSwxMC4yMDMgMCw2LjAzMiAtNC4zMTI1LDExLjUgLTExLjM1OTMsMTEuNSAtMTMuMjE4OCwwIC0xOC41MzEzLC0yMC44NDMgLTE4LjUzMTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3ODEzLC0xLjI5NyAxLjU3ODEzLC0xLjI5NyAxLjI5Njg3LDAgMS40Mzc1LDAuNTc4IDIuMDE1NjIsMi41OTQgMy40NTMxNSwxMi4zNDQgOS4wNDY4NSwxNy44MTIgMTQuNTE1NjUsMTcuODEyIDEuMjgxMiwwIDMuNzM0NCwwIDMuNzM0NCwtNC43NSAwLC0zLjczNCAtMS41NzgyLC03Ljg5IC0zLjczNDQsLTEzLjM1OSAtNi45MDYzLC0xOC4zOTEgLTYuOTA2MywtMjIuODQ0IC02LjkwNjMsLTI2LjI4MSAwLC0zLjE3MiAwLjQzNzUsLTkuMDQ3IDQuODkwNywtMTMuMDc4IDUuMTcxOCwtNC40NTMgMTIuMzU5MywtNC40NTMgMTMuNjQwNiwtNC40NTMgMjMuODU5NCwwIDMyLjA0NjksNDYuOTg0IDMyLjA0NjksNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjY5Ljk2OSw4MjAuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU0MC42NTYsODI3LjczNCBjIDAsOS4wNDcgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMgLTYuNjA5LC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU3OCwtMy4yOTcgMS40MzgsLTEuMjk2IDUuMTcyLC01LjE3MSA1LjE3MiwtMTIuNjU2IDAsLTYuMDMxIC04LjYyNSwtMzkuNjQgLTI1Ljg1OSwtMzkuNjQgLTguNzY2LDAgLTEwLjQ4NSw3LjMyOCAtMTAuNDg1LDEyLjY0IDAsNy4xODggMy4yOTcsMTcuMjM1IDcuMTg4LDI3LjU3OCAyLjI5Nyw1Ljg5MSAyLjg3NSw3LjMyOCAyLjg3NSwxMC4yMDMgMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMzQ0IDkuMDQ3LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsMCAzLjczNSwtNC43NSAwLC0zLjczNCAtMS41NzgsLTcuODkgLTMuNzM1LC0xMy4zNTkgLTYuOTA2LC0xOC4zOTEgLTYuOTA2LC0yMi44NDQgLTYuOTA2LC0yNi4yODEgMCwtMy4xNzIgMC40MzgsLTkuMDQ3IDQuODkxLC0xMy4wNzggNS4xNzIsLTQuNDUzIDEyLjM1OSwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDQ3LDQ2Ljk4NCAzMi4wNDcsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTczLjEyNSw4NzQuMTg4IGMgMC41LDEuMTg3IDAuOTA2LDIuMDc4IDAuOTA2LDMuMDc4IDAsMi44NzUgLTIuNTkzLDUuMjY1IC01LjY3Miw1LjI2NSAtMi43ODEsMCAtNC41NjIsLTEuODkgLTUuMjY1LC00LjQ2OCBsIC0xMS44MTMsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQwNiwtMS4yOTcgLTAuNDA2LC0xLjM5IDAsLTEuMDk0IDIuNTk0LC0xLjc5NyAzLjM5MSwtMS43OTcgMC41OTMsMCAwLjY4NywwLjI5NyAxLjI4MSwxLjU5NCBsIDE3LjU3OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NzcuMTcyLDc2OSBjIDAuNjA5LDIuNTc4IDIuODkxLDExLjcxOSA5Ljg0NCwxMS43MTkgMC41LDAgMi44NzUsMCA0Ljk2OCwtMS4yODEgLTIuNzgxLC0wLjUgLTQuNzY1LC0yLjk4NSAtNC43NjUsLTUuMzc1IDAsLTEuNTc5IDEuMDc4LC0zLjQ2OSAzLjc2NSwtMy40NjkgMi4xODgsMCA1LjM2LDEuNzgxIDUuMzYsNS43NSAwLDUuMTcyIC01Ljg2LDYuNTYyIC05LjIzNSw2LjU2MiAtNS43NjUsMCAtOS4yMzQsLTUuMjY1IC0xMC40MjEsLTcuNTQ3IC0yLjQ4NSw2LjU0NyAtNy44Niw3LjU0NyAtMTAuNzM1LDcuNTQ3IC0xMC4zMjgsMCAtMTYsLTEyLjgxMiAtMTYsLTE1LjI5NyAwLC0xIDEsLTEgMS4yMDMsLTEgMC43OTcsMCAxLjA5NCwwLjIwNCAxLjI4MiwxLjA5NCAzLjM5LDEwLjUzMSA5LjkzNywxMy4wMTYgMTMuMzEyLDEzLjAxNiAxLjg5MSwwIDUuMzc1LC0wLjg5MSA1LjM3NSwtNi42NTYgMCwtMy4wNzkgLTEuNjg3LC05LjczNSAtNS4zNzUsLTIzLjY0MSAtMS41NzgsLTYuMTU2IC01LjA2MiwtMTAuMzI4IC05LjQzNywtMTAuMzI4IC0wLjU5NCwwIC0yLjg3NSwwIC00Ljk2OSwxLjI5NyAyLjQ4NCwwLjQ4NCA0LjY3MiwyLjU3OCA0LjY3Miw1LjM1OSAwLDIuNjg4IC0yLjE4OCwzLjQ2OSAtMy42NzIsMy40NjkgLTIuOTg1LDAgLTUuNDY5LC0yLjU3OCAtNS40NjksLTUuNzUgMCwtNC41NzggNC45NjksLTYuNTYzIDkuMzQ0LC02LjU2MyA2LjU2MiwwIDEwLjEyNSw2Ljk1MyAxMC40MzcsNy41NDcgMS4xODgsLTMuNjcyIDQuNzY2LC03LjU0NyAxMC43MTksLTcuNTQ3IDEwLjIzNCwwIDE1Ljg5MSwxMi44MTMgMTUuODkxLDE1LjI5NyAwLDEgLTAuODkxLDEgLTEuMTg4LDEgLTAuODksMCAtMS4wOTQsLTAuNDA2IC0xLjI5NywtMS4wOTQgLTMuMjY1LC0xMC42MjUgLTEwLjAzMSwtMTMuMDE1IC0xMy4yMDMsLTEzLjAxNSAtMy44NzUsMCAtNS40NjksMy4xNzIgLTUuNDY5LDYuNTYyIDAsMi4xNzIgMC41OTQsNC4zNiAxLjY4OCw4LjczNSBMIDU3Ny4xNzIsNzY5IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjc1Ljg1OSw4OTQuNzY2IGMgLTEuNzM0LC0xLjU3OCAtNy4wNDYsLTYuNjEgLTcuMDQ2LC04LjYyNSAwLC0xLjQzOCAxLjI5NiwtMi43MTkgMi43MzQsLTIuNzE5IDEuMjk3LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMsNC4yOTcgNy4zMjgsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzEsNi42MDkgLTUuNDY4LDguMzI4IC0wLjQyMiwxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44NzUsMCAtMi41OTMsLTAuNTYzIC0yLjU5MywtMi43MTkgMCwtMS4yOTcgMC44NTksLTQuNzUgMy41OTMsLTguNjI1IGwgLTQ4LjI2NSwwIGMgLTIuNDUzLDAgLTQuODkxLDAgLTQuODkxLC0yLjczNCAwLC0yLjU3OCAyLjU5NCwtMi41NzggNC44OTEsLTIuNTc4IGwgNDUuOTY4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NDUuNjU2LDc5NC41NDcgYyAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzcsMS4yODEgLTEuMjk3LDAgLTEuNDM4LC0wLjQyMiAtMi4xNTYsLTIuODU5IC0zLjczNSwtMTMuMDc4IC05LjYyNSwtMTcuNTMxIC0xNC4zNiwtMTcuNTMxIC0xLjczNCwwIC0zLjczNCwwLjQzNyAtMy43MzQsNC43MzQgMCwzLjg5MSAxLjcxOSw4LjE4NyAzLjI5NywxMi41IGwgMTAuMDYyLDI2LjcxOSBjIDAuNDIyLDEuMTU2IDEuNDM4LDMuNzM0IDEuNDM4LDYuNDY4IDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjA2MiA4LjkwNiwxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LC0wLjE1NiAzLjczNSwtNC43NSAwLC0zLjczNCAtMS44NzUsLTguNDY4IC0zLjAxNiwtMTEuNjI1IGwgLTEwLjA2MiwtMjYuNzM0IGMgLTAuODYsLTIuMjk3IC0xLjcxOSwtNC41OTQgLTEuNzE5LC03LjE3MiAwLC02LjQ2OSA0LjQ1MywtMTEuNjQgMTEuMzQ0LC0xMS42NCAxMy4yMTgsMCAxOC4zOSwyMC45NjggMTguMzksMjEuOTg0IHogbSAtMS4xNTYsNjkuMDk0IGMgMCwyLjE1NiAtMS43MTksNC43MzQgLTQuODc1LDQuNzM0IC0zLjMxMiwwIC03LjA0NywtMy4xNTYgLTcuMDQ3LC02Ljg5MSAwLC0zLjU5MyAzLjAxNiwtNC43MzQgNC43NSwtNC43MzQgMy44NzUsMCA3LjE3MiwzLjczNCA3LjE3Miw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY3OC4xMjUsODYzLjE4OCBjIDAuNSwxLjE4NyAwLjkwNiwyLjA3OCAwLjkwNiwzLjA3OCAwLDIuODc1IC0yLjU5Myw1LjI2NSAtNS42NzIsNS4yNjUgLTIuNzgxLDAgLTQuNTYyLC0xLjg5IC01LjI2NSwtNC40NjggbCAtMTEuODEzLC00My40MDcgYyAwLC0wLjIwMyAtMC40MDYsLTEuMjk3IC0wLjQwNiwtMS4zOSAwLC0xLjA5NCAyLjU5NCwtMS43OTcgMy4zOTEsLTEuNzk3IDAuNTkzLDAgMC42ODcsMC4yOTcgMS4yODEsMS41OTQgbCAxNy41NzgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzc1LjMxMyw4MDcuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTIzLjY1Niw4MjcuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5NTYuMTI1LDg3NC4xODggYyAwLjUsMS4xODcgMC45MDYsMi4wNzggMC45MDYsMy4wNzggMCwyLjg3NSAtMi41OTMsNS4yNjUgLTUuNjcyLDUuMjY1IC0yLjc4MSwwIC00LjU2MiwtMS44OSAtNS4yNjUsLTQuNDY4IGwgLTExLjgxMywtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNDA2LC0xLjI5NyAtMC40MDYsLTEuMzkgMCwtMS4wOTQgMi41OTQsLTEuNzk3IDMuMzkxLC0xLjc5NyAwLjU5MywwIDAuNjg3LDAuMjk3IDEuMjgxLDEuNTk0IGwgMTcuNTc4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk3NC4yODEsNzc2Ljg0NCBjIDAuMzkxLDEuMzkgMC4zOTEsMS41OTQgMC4zOTEsMi4yODEgMCwxLjc5NyAtMS4zOTEsMi42ODggLTIuODc1LDIuNjg4IC0xLDAgLTIuNTc4LC0wLjU5NCAtMy40ODQsLTIuMDc5IC0wLjE4OCwtMC41IC0wLjk4NSwtMy41NzggLTEuMzkxLC01LjM3NSAtMC42ODgsLTIuNTc4IC0xLjM5MSwtNS4yNjUgLTEuOTg0LC03LjkzNyBsIC00LjQ2OSwtMTcuODkxIGMgLTAuMzkxLC0xLjQ4NCAtNC42NzIsLTguNDM3IC0xMS4yMTksLTguNDM3IC01LjA3OCwwIC02LjE1Niw0LjM3NSAtNi4xNTYsOC4wNDcgMCw0LjU2MiAxLjY4NywxMC43MzQgNS4wNjIsMTkuNDY4IDEuNTc4LDQuMDc5IDEuOTg1LDUuMTcyIDEuOTg1LDcuMTU3IDAsNC40NjggLTMuMTg4LDguMTQgLTguMTQxLDguMTQgLTkuNDM3LDAgLTEzLjEyNSwtMTQuNDA2IC0xMy4xMjUsLTE1LjI5NyAwLC0xIDEsLTEgMS4yMDMsLTEgMC45ODUsMCAxLjA5NCwwLjIwNCAxLjU3OCwxLjc5NyAyLjY4OCw5LjMyOCA2LjY1NywxMi4zMTMgMTAuMDMyLDEyLjMxMyAwLjc5NiwwIDIuNDg0LDAgMi40ODQsLTMuMTcyIDAsLTIuNDg0IC0wLjk4NCwtNS4wNjMgLTEuNjg4LC02Ljk1MyAtMy45NjgsLTEwLjUzMSAtNS43NSwtMTYuMjAzIC01Ljc1LC0yMC44NiAwLC04Ljg0MyA2LjI1LC0xMS44MjggMTIuMTEsLTExLjgyOCAzLjg3NSwwIDcuMjUsMS42ODggMTAuMDMxLDQuNDY5IC0xLjI4MSwtNS4xNTYgLTIuNDg0LC0xMC4wMzEgLTYuNDUzLC0xNS4yOTcgLTIuNTc4LC0zLjM3NSAtNi4zNTksLTYuMjUgLTEwLjkyMiwtNi4yNSAtMS4zOTEsMCAtNS44NTksMC4yOTcgLTcuNTQ3LDQuMTcyIDEuNTc4LDAgMi44NzUsMCA0LjI2NiwxLjE4OCAxLDAuODkgMS45ODQsMi4xODcgMS45ODQsNC4wNzggMCwzLjA3OCAtMi42ODcsMy40NjggLTMuNjcyLDMuNDY4IC0yLjI4MSwwIC01LjU2MiwtMS41OTMgLTUuNTYyLC02LjQ1MyAwLC00Ljk2OCA0LjM3NSwtOC42NCAxMC41MzEsLTguNjQgMTAuMjM0LDAgMjAuNDUzLDkuMDMxIDIzLjIzNCwyMC4yNjUgbCA5LjU0NywzNy45MzgiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDYyLjg2LDg5NC43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMzQuMjgsODE5LjU0NyBjIDAuNTgsMi4yOTcgMC41OCw0LjI5NyAwLjU4LDQuODc1IDAsOC4zMjggLTYuMTksMTIuOTM3IC0xMi42NCwxMi45MzcgLTE0LjUyLDAgLTIyLjI2NywtMjAuOTg0IC0yMi4yNjcsLTIxLjk4NCAwLC0wLjcxOSAwLjU2NywtMS4yOTcgMS40MjcsLTEuMjk3IDEuMTUsMCAxLjI5LDAuNTc4IDIuMDEsMi4wMTYgNS43NSwxMy45MzcgMTIuOTQsMTguMzkgMTguMzksMTguMzkgMy4wMiwwIDQuNiwtMS41NzggNC42LC02LjYwOSAwLC0zLjQ1MyAtMC40MywtNC44OTEgLTEsLTcuNDY5IGwgLTEzLjY2LC01NC4xNTYgYyAtMi43MiwtMTAuNjQxIC05LjQ3LC0xOC42ODcgLTE3LjM3NiwtMTguNjg3IC0wLjU3OCwwIC0zLjU5NCwwIC02LjMyOCwxLjQzNyAzLjQ1MywwLjcxOSA2LjE4NywzLjQ1MyA2LjE4Nyw2LjkwNiAwLDIuMjk3IC0xLjczNCw0LjU5NCAtNC44OSw0LjU5NCAtMy43MzUsMCAtNy4xODgsLTMuMTcyIC03LjE4OCwtNy40NjkgMCwtNS44OSA2LjMyOCwtOC4zNDMgMTIuMjE5LC04LjM0MyA5LjkwNiwwIDIyLjk4Niw3LjMyOCAyNi41NzYsMjEuNzAzIGwgMTMuMzYsNTMuMTU2IHogbSA1Ljg5LDQ0LjA5NCBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDc1LjEzLDg2My4xODggYyAwLjUsMS4xODcgMC45LDIuMDc4IDAuOSwzLjA3OCAwLDIuODc1IC0yLjU5LDUuMjY1IC01LjY3LDUuMjY1IC0yLjc4LDAgLTQuNTYsLTEuODkgLTUuMjcsLTQuNDY4IGwgLTExLjgxLC00My40MDcgYyAwLC0wLjIwMyAtMC40LC0xLjI5NyAtMC40LC0xLjM5IDAsLTEuMDk0IDIuNTksLTEuNzk3IDMuMzksLTEuNzk3IDAuNTksMCAwLjY4LDAuMjk3IDEuMjgsMS41OTQgbCAxNy41OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjE4Ljk3LDgyMC41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM1IC0yLjQzLDIuNzM1IC00LjU5LDIuNzM1IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTk0IDAsLTIuNzE5IDIuNDUsLTIuNzE5IDQuNjEsLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI2OS45NjksNTc5LjU0NyBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM1IC0yLjQzOCwyLjczNSAtNC41OTQsMi43MzUgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41OTQgMCwtMi43MTkgMi40NTMsLTIuNzE5IDQuNjA5LC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0NzcuNjU2LDU4Ni43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDUxMC4xMjUsNjMyLjE4OCBjIDAuNSwxLjE4NyAwLjkwNiwyLjA3OCAwLjkwNiwzLjA3OCAwLDIuODc1IC0yLjU5Myw1LjI2NSAtNS42NzIsNS4yNjUgLTIuNzgxLDAgLTQuNTYyLC0xLjg5IC01LjI2NSwtNC40NjggbCAtMTEuODEzLC00My40MDcgYyAwLC0wLjIwMyAtMC40MDYsLTEuMjk3IC0wLjQwNiwtMS4zOSAwLC0xLjA5NCAyLjU5NCwtMS43OTcgMy4zOTEsLTEuNzk3IDAuNTkzLDAgMC42ODcsMC4yOTcgMS4yODEsMS41OTQgbCAxNy41NzgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTEzLjE3Miw1MjcgYyAwLjYwOSwyLjU3OCAyLjg5MSwxMS43MTkgOS44NDQsMTEuNzE5IDAuNSwwIDIuODc1LDAgNC45NjgsLTEuMjgxIC0yLjc4MSwtMC41IC00Ljc2NSwtMi45ODUgLTQuNzY1LC01LjM3NSAwLC0xLjU3OSAxLjA3OCwtMy40NjkgMy43NjUsLTMuNDY5IDIuMTg4LDAgNS4zNiwxLjc4MSA1LjM2LDUuNzUgMCw1LjE3MiAtNS44Niw2LjU2MiAtOS4yMzUsNi41NjIgLTUuNzY1LDAgLTkuMjM0LC01LjI2NSAtMTAuNDIxLC03LjU0NyAtMi40ODUsNi41NDcgLTcuODYsNy41NDcgLTEwLjczNSw3LjU0NyAtMTAuMzI4LDAgLTE2LC0xMi44MTIgLTE2LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjAzLC0xIDAuNzk3LDAgMS4wOTQsMC4yMDQgMS4yODIsMS4wOTQgMy4zOSwxMC41MzEgOS45MzcsMTMuMDE2IDEzLjMxMiwxMy4wMTYgMS44OTEsMCA1LjM3NSwtMC44OTEgNS4zNzUsLTYuNjU2IDAsLTMuMDc5IC0xLjY4NywtOS43MzUgLTUuMzc1LC0yMy42NDEgLTEuNTc4LC02LjE1NiAtNS4wNjIsLTEwLjMyOCAtOS40MzcsLTEwLjMyOCAtMC41OTQsMCAtMi44NzUsMCAtNC45NjksMS4yOTcgMi40ODQsMC40ODQgNC42NzIsMi41NzggNC42NzIsNS4zNTkgMCwyLjY4OCAtMi4xODgsMy40NjkgLTMuNjcyLDMuNDY5IC0yLjk4NSwwIC01LjQ2OSwtMi41NzggLTUuNDY5LC01Ljc1IDAsLTQuNTc4IDQuOTY5LC02LjU2MyA5LjM0NCwtNi41NjMgNi41NjIsMCAxMC4xMjUsNi45NTMgMTAuNDM3LDcuNTQ3IDEuMTg4LC0zLjY3MiA0Ljc2NiwtNy41NDcgMTAuNzE5LC03LjU0NyAxMC4yMzQsMCAxNS44OTEsMTIuODEzIDE1Ljg5MSwxNS4yOTcgMCwxIC0wLjg5MSwxIC0xLjE4OCwxIC0wLjg5LDAgLTEuMDk0LC0wLjQwNiAtMS4yOTcsLTEuMDk0IC0zLjI2NSwtMTAuNjI1IC0xMC4wMzEsLTEzLjAxNSAtMTMuMjAzLC0xMy4wMTUgLTMuODc1LDAgLTUuNDY5LDMuMTcyIC01LjQ2OSw2LjU2MiAwLDIuMTcyIDAuNTk0LDQuMzYgMS42ODgsOC43MzUgTCA1MTMuMTcyLDUyNyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU4Ny42ODgsNDk4LjA5NCBjIDAsMC40MjIgMCwwLjcxOSAtMi40MzgsMy4xNTYgLTE0LjM3NSwxNC41MTYgLTIyLjQyMiwzOC4yMTkgLTIyLjQyMiw2Ny41MTYgMCwyNy44NzUgNi43NjYsNTEuODU5IDIzLjQyMiw2OC44MTIgMS40MzgsMS4yOTcgMS40MzgsMS41NzggMS40MzgsMi4wMTYgMCwwLjg1OSAtMC43MTksMS4xNTYgLTEuMjk3LDEuMTU2IC0xLjg2LDAgLTEzLjY0MSwtMTAuMzQ0IC0yMC42ODgsLTI0LjQyMiAtNy4zMjgsLTE0LjUxNSAtMTAuNjI1LC0yOS44OSAtMTAuNjI1LC00Ny41NjIgMCwtMTIuNzgyIDIuMDE2LC0yOS44NzUgOS40ODUsLTQ1LjI1IDguNDY4LC0xNy4yMzUgMjAuMjUsLTI2LjU3OCAyMS44MjgsLTI2LjU3OCAwLjU3OCwwIDEuMjk3LDAuMjk2IDEuMjk3LDEuMTU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjM5LjIzNCw1NTAuMDk0IGMgLTAuNzE4LC0yLjQzOCAtMC43MTgsLTIuNzM1IC0yLjcxOCwtNS40NTMgLTMuMTcyLC00LjAzMiAtOS40ODUsLTEwLjIwMyAtMTYuMjM1LC0xMC4yMDMgLTUuODksMCAtOS4yMDMsNS4zMTIgLTkuMjAzLDEzLjc5NiAwLDcuODkxIDQuNDUzLDIzLjk4NSA3LjE4OCwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzNCwxNS4yMzQgOS40ODQsMCAxMS4zNTksLTExLjc4MSAxMS4zNTksLTEyLjkzNyAwLC0wLjE0MSAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NyBsIC03LjA0NywtMjguMTU2IHogbSA5LjIwNCwzNi43ODEgYyAtMS41NzksMy43MzQgLTUuNDY5LDkuNDg0IC0xMi45MzgsOS40ODQgLTE2LjIzNCwwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMyOCwtMjIuNTYyIDE4LjA5NCwtMjIuNTYyIDcuOTA2LDAgMTQuNjU2LDYuMTcxIDE4LjY3MiwxMC45MjEgMS40MzcsLTguNDg0IDguMTg3LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEyLDAgNy43NjUsMi41OTMgMTAuMzQzLDcuNzY1IDIuMjk3LDQuODc1IDQuMzEzLDEzLjY0MSA0LjMxMywxNC4yMTkgMCwwLjcxOSAtMC41NzgsMS4yODEgLTEuNDM4LDEuMjgxIC0xLjI5NiwwIC0xLjQzNywtMC43MDMgLTIuMDE1LC0yLjg1OSAtMi4xNDEsLTguNDg1IC00Ljg3NSwtMTcuNTMxIC0xMC43NjYsLTE3LjUzMSAtNC4xNzIsMCAtNC40NTMsMy43MzQgLTQuNDUzLDYuNjA5IDAsMy4yOTcgMC40MjIsNC44NzUgMS43MTksMTAuNDg0IDEuMDE1LDMuNTk0IDEuNzM0LDYuNzUgMi44NzUsMTAuOTIyIDUuMzEyLDIxLjU0NyA2LjYwOSwyNi43MTkgNi42MDksMjcuNTc4IDAsMi4wMTYgLTEuNTc4LDMuNTk0IC0zLjczNCwzLjU5NCAtNC41OTQsMCAtNS43NSwtNS4wMzEgLTYuMDMxLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjk5LjIwMyw1NzQuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzQ5LjIwMyw1NzQuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODI4Ljg1OSw2NDkuNzY2IGMgLTEuNzM0LC0xLjU3OCAtNy4wNDYsLTYuNjEgLTcuMDQ2LC04LjYyNSAwLC0xLjQzOCAxLjI5NiwtMi43MTkgMi43MzQsLTIuNzE5IDEuMjk3LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMsNC4yOTcgNy4zMjgsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzEsNi42MDkgLTUuNDY4LDguMzI4IC0wLjQyMiwxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44NzUsMCAtMi41OTMsLTAuNTYzIC0yLjU5MywtMi43MTkgMCwtMS4yOTcgMC44NTksLTQuNzUgMy41OTMsLTguNjI1IGwgLTQ4LjI2NSwwIGMgLTIuNDUzLDAgLTQuODkxLDAgLTQuODkxLC0yLjczNCAwLC0yLjU3OCAyLjU5NCwtMi41NzggNC44OTEsLTIuNTc4IGwgNDUuOTY4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MTQuNjU2LDU1My41NDcgYyAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzcsMS4yODEgLTEuMjk3LDAgLTEuNDM4LC0wLjQyMiAtMi4xNTYsLTIuODU5IC0zLjczNSwtMTMuMDc4IC05LjYyNSwtMTcuNTMxIC0xNC4zNiwtMTcuNTMxIC0xLjczNCwwIC0zLjczNCwwLjQzNyAtMy43MzQsNC43MzQgMCwzLjg5MSAxLjcxOSw4LjE4NyAzLjI5NywxMi41IGwgMTAuMDYyLDI2LjcxOSBjIDAuNDIyLDEuMTU2IDEuNDM4LDMuNzM0IDEuNDM4LDYuNDY4IDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjA2MiA4LjkwNiwxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LC0wLjE1NiAzLjczNSwtNC43NSAwLC0zLjczNCAtMS44NzUsLTguNDY4IC0zLjAxNiwtMTEuNjI1IGwgLTEwLjA2MiwtMjYuNzM0IGMgLTAuODYsLTIuMjk3IC0xLjcxOSwtNC41OTQgLTEuNzE5LC03LjE3MiAwLC02LjQ2OSA0LjQ1MywtMTEuNjQgMTEuMzQ0LC0xMS42NCAxMy4yMTgsMCAxOC4zOSwyMC45NjggMTguMzksMjEuOTg0IHogbSAtMS4xNTYsNjkuMDk0IGMgMCwyLjE1NiAtMS43MTksNC43MzQgLTQuODc1LDQuNzM0IC0zLjMxMiwwIC03LjA0NywtMy4xNTYgLTcuMDQ3LC02Ljg5MSAwLC0zLjU5MyAzLjAxNiwtNC43MzQgNC43NSwtNC43MzQgMy44NzUsMCA3LjE3MiwzLjczNCA3LjE3Miw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDkxMS4zMTMsNTY2LjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDcwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMzkuMjMsNTUwLjA5NCBjIC0wLjcxLC0yLjQzOCAtMC43MSwtMi43MzUgLTIuNzEsLTUuNDUzIC0zLjE4LC00LjAzMiAtOS40OSwtMTAuMjAzIC0xNi4yNCwtMTAuMjAzIC01Ljg5LDAgLTkuMiw1LjMxMiAtOS4yLDEzLjc5NiAwLDcuODkxIDQuNDUsMjMuOTg1IDcuMTksMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMywxNS4yMzQgOS40OCwwIDExLjM2LC0xMS43ODEgMTEuMzYsLTEyLjkzNyAwLC0wLjE0MSAtMC40NCwtMiAtMC41OCwtMi4yOTcgbCAtNy4wNSwtMjguMTU2IHogbSA5LjIxLDM2Ljc4MSBjIC0xLjU4LDMuNzM0IC01LjQ3LDkuNDg0IC0xMi45NCw5LjQ4NCAtMTYuMjMsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMywtMjIuNTYyIDE4LjA5LC0yMi41NjIgNy45MSwwIDE0LjY2LDYuMTcxIDE4LjY4LDEwLjkyMSAxLjQzLC04LjQ4NCA4LjE4LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEsMCA3Ljc2LDIuNTkzIDEwLjM0LDcuNzY1IDIuMyw0Ljg3NSA0LjMxLDEzLjY0MSA0LjMxLDE0LjIxOSAwLDAuNzE5IC0wLjU4LDEuMjgxIC0xLjQ0LDEuMjgxIC0xLjI5LDAgLTEuNDMsLTAuNzAzIC0yLjAxLC0yLjg1OSAtMi4xNCwtOC40ODUgLTQuODgsLTE3LjUzMSAtMTAuNzcsLTE3LjUzMSAtNC4xNywwIC00LjQ1LDMuNzM0IC00LjQ1LDYuNjA5IDAsMy4yOTcgMC40Miw0Ljg3NSAxLjcyLDEwLjQ4NCAxLjAxLDMuNTk0IDEuNzMsNi43NSAyLjg3LDEwLjkyMiA1LjMyLDIxLjU0NyA2LjYxLDI2LjcxOSA2LjYxLDI3LjU3OCAwLDIuMDE2IC0xLjU3LDMuNTk0IC0zLjczLDMuNTk0IC00LjU5LDAgLTUuNzUsLTUuMDMxIC02LjAzLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTA5OC4yLDU3NC41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgsMi41NzggLTYuMTUsLTYuMzU5IC0xNC45LC02LjM1OSAtMTguMDgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk5LDAgNy44NSwwIDEzLjAyLDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMywtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcsMCAwLC0zLjA3OCBjIDMuNDcsMC4yOTcgMTIuMTIsMC4yOTcgMTYuMDksMC4yOTcgMy45NywwIDEyLjYxLDAgMTYuMSwtMC4yOTcgbCAwLDMuMDc4IC0zLjE5LDAgYyAtOC45NCwwIC05LjI0LDEuMDk0IC05LjI0LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMTMyLjYxLDUxOC42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIzNi44Niw2NDkuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjI0LjI4LDU3OC41NDcgYyAwLjU4LDIuMjk3IDAuNTgsNC4yOTcgMC41OCw0Ljg3NSAwLDguMzI4IC02LjE5LDEyLjkzNyAtMTIuNjQsMTIuOTM3IC0xNC41MiwwIC0yMi4yNywtMjAuOTg0IC0yMi4yNywtMjEuOTg0IDAsLTAuNzE5IDAuNTcsLTEuMjk3IDEuNDMsLTEuMjk3IDEuMTUsMCAxLjI5LDAuNTc4IDIuMDEsMi4wMTYgNS43NSwxMy45MzcgMTIuOTQsMTguMzkgMTguMzksMTguMzkgMy4wMiwwIDQuNiwtMS41NzggNC42LC02LjYwOSAwLC0zLjQ1MyAtMC40MywtNC44OTEgLTEsLTcuNDY5IGwgLTEzLjY2LC01NC4xNTYgYyAtMi43MiwtMTAuNjQxIC05LjQ3LC0xOC42ODcgLTE3LjM4LC0xOC42ODcgLTAuNTcsMCAtMy41OSwwIC02LjMyLDEuNDM3IDMuNDUsMC43MTkgNi4xOCwzLjQ1MyA2LjE4LDYuOTA2IDAsMi4yOTcgLTEuNzMsNC41OTQgLTQuODksNC41OTQgLTMuNzMsMCAtNy4xOCwtMy4xNzIgLTcuMTgsLTcuNDY5IDAsLTUuODkgNi4zMiwtOC4zNDMgMTIuMjEsLTguMzQzIDkuOTEsMCAyMi45OSw3LjMyOCAyNi41OCwyMS43MDMgbCAxMy4zNiw1My4xNTYgeiBtIDUuODksNDQuMDk0IGMgMCwzLjU5MyAtMy4wMSw0LjczNCAtNC43NSw0LjczNCAtMy44NywwIC03LjE3LC0zLjczNCAtNy4xNywtNi44OTEgMCwtMi4xNTYgMS43MiwtNC43MzQgNC44OCwtNC43MzQgMy4zMSwwIDcuMDQsMy4xNTYgNy4wNCw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyODAuNTIsNTY4Ljc2NiBjIDAsMTAuOTIyIC0xLjQ0LDI4LjczNCAtOS40OSw0NS40MDYgLTguNDgsMTcuMjM0IC0yMC4yNSwyNi41NzggLTIxLjg0LDI2LjU3OCAtMC41NiwwIC0xLjI4LC0wLjI5NyAtMS4yOCwtMS4xNTYgMCwtMC40MzggMCwtMC43MTkgMi40MywtMy4xNTYgMTQuMzYsLTE0LjUxNiAyMi40MSwtMzguMjE5IDIyLjQxLC02Ny41MTYgMCwtMjcuODc1IC02Ljc1LC01MS44NzUgLTIzLjQxLC02OC44MTMgLTEuNDMsLTEuMjk2IC0xLjQzLC0xLjU5MyAtMS40MywtMi4wMTUgMCwtMC44NiAwLjcyLC0xLjE1NiAxLjI4LC0xLjE1NiAxLjg3LDAgMTMuNjUsMTAuMzQzIDIwLjY5LDI0LjQyMSA3LjMyLDE0LjY1NyAxMC42NCwzMC4xNzIgMTAuNjQsNDcuNDA3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ4MS4zMSw1NjYuMTg4IDM5LjY2LDAgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDM5LjY0LDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5LC00LjU5MyAyLjcyLDAgMi43MiwyLjQzNyAyLjcyLDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzM5LjY2LDU4Ni43MzQgYyAwLDkuMDQ3IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzIC02LjYxLC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU4LC0zLjI5NyAxLjQzLC0xLjI5NiA1LjE3LC01LjE3MSA1LjE3LC0xMi42NTYgMCwtNi4wMzEgLTguNjMsLTM5LjY0IC0yNS44NiwtMzkuNjQgLTguNzcsMCAtMTAuNDksNy4zMjggLTEwLjQ5LDEyLjY0IDAsNy4xODggMy4zLDE3LjIzNSA3LjE5LDI3LjU3OCAyLjMsNS44OTEgMi44OCw3LjMyOCAyLjg4LDEwLjIwMyAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMzQ0IDkuMDUsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTEgLTYuOSwtMjIuODQ0IC02LjksLTI2LjI4MSAwLC0zLjE3MiAwLjQ0LC05LjA0NyA0Ljg5LC0xMy4wNzggNS4xNywtNC40NTMgMTIuMzYsLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA1LDQ2Ljk4NCAzMi4wNSw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzcyLjEzLDYzMi4xODggYyAwLjUsMS4xODcgMC45LDIuMDc4IDAuOSwzLjA3OCAwLDIuODc1IC0yLjU5LDUuMjY1IC01LjY3LDUuMjY1IC0yLjc4LDAgLTQuNTYsLTEuODkgLTUuMjcsLTQuNDY4IGwgLTExLjgxLC00My40MDcgYyAwLC0wLjIwMyAtMC40LC0xLjI5NyAtMC40LC0xLjM5IDAsLTEuMDk0IDIuNTksLTEuNzk3IDMuMzksLTEuNzk3IDAuNTksMCAwLjY4LDAuMjk3IDEuMjgsMS41OTQgbCAxNy41OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzkwLjI4LDUzNC44NDQgYyAwLjM5LDEuMzkgMC4zOSwxLjU5NCAwLjM5LDIuMjgxIDAsMS43OTcgLTEuMzksMi42ODggLTIuODcsMi42ODggLTEsMCAtMi41OCwtMC41OTQgLTMuNDksLTIuMDc5IC0wLjE4LC0wLjUgLTAuOTgsLTMuNTc4IC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzggLTEuMzksLTUuMjY1IC0xLjk4LC03LjkzNyBsIC00LjQ3LC0xNy44OTEgYyAtMC4zOSwtMS40ODQgLTQuNjcsLTguNDM3IC0xMS4yMiwtOC40MzcgLTUuMDgsMCAtNi4xNiw0LjM3NSAtNi4xNiw4LjA0NyAwLDQuNTYyIDEuNjksMTAuNzM0IDUuMDcsMTkuNDY4IDEuNTcsNC4wNzkgMS45OCw1LjE3MiAxLjk4LDcuMTU3IDAsNC40NjggLTMuMTksOC4xNCAtOC4xNCw4LjE0IC05LjQ0LDAgLTEzLjEyLC0xNC40MDYgLTEzLjEyLC0xNS4yOTcgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwNCAxLjU4LDEuNzk3IDIuNjgsOS4zMjggNi42NSwxMi4zMTMgMTAuMDMsMTIuMzEzIDAuNzksMCAyLjQ4LDAgMi40OCwtMy4xNzIgMCwtMi40ODQgLTAuOTgsLTUuMDYzIC0xLjY5LC02Ljk1MyAtMy45NiwtMTAuNTMxIC01Ljc1LC0xNi4yMDMgLTUuNzUsLTIwLjg2IDAsLTguODQzIDYuMjUsLTExLjgyOCAxMi4xMSwtMTEuODI4IDMuODgsMCA3LjI1LDEuNjg4IDEwLjA0LDQuNDY5IC0xLjI5LC01LjE1NiAtMi40OSwtMTAuMDMxIC02LjQ2LC0xNS4yOTcgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI1IC0xMC45MiwtNi4yNSAtMS4zOSwwIC01Ljg2LDAuMjk3IC03LjU1LDQuMTcyIDEuNTgsMCAyLjg4LDAgNC4yNywxLjE4OCAxLDAuODkgMS45OCwyLjE4NyAxLjk4LDQuMDc4IDAsMy4wNzggLTIuNjgsMy40NjggLTMuNjcsMy40NjggLTIuMjgsMCAtNS41NiwtMS41OTMgLTUuNTYsLTYuNDUzIDAsLTQuOTY4IDQuMzcsLTguNjQgMTAuNTMsLTguNjQgMTAuMjMsMCAyMC40NSw5LjAzMSAyMy4yMywyMC4yNjUgbCA5LjU1LDM3LjkzOCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4NDUuNjksNDk4LjA5NCBjIDAsMC40MjIgMCwwLjcxOSAtMi40NCwzLjE1NiAtMTQuMzcsMTQuNTE2IC0yMi40MiwzOC4yMTkgLTIyLjQyLDY3LjUxNiAwLDI3Ljg3NSA2Ljc2LDUxLjg1OSAyMy40Miw2OC44MTIgMS40NCwxLjI5NyAxLjQ0LDEuNTc4IDEuNDQsMi4wMTYgMCwwLjg1OSAtMC43MiwxLjE1NiAtMS4zLDEuMTU2IC0xLjg2LDAgLTEzLjY0LC0xMC4zNDQgLTIwLjY5LC0yNC40MjIgLTcuMzIsLTE0LjUxNSAtMTAuNjIsLTI5Ljg5IC0xMC42MiwtNDcuNTYyIDAsLTEyLjc4MiAyLjAxLC0yOS44NzUgOS40OCwtNDUuMjUgOC40NywtMTcuMjM1IDIwLjI1LC0yNi41NzggMjEuODMsLTI2LjU3OCAwLjU4LDAgMS4zLDAuMjk2IDEuMywxLjE1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4OTcuMjMsNTUwLjA5NCBjIC0wLjcxLC0yLjQzOCAtMC43MSwtMi43MzUgLTIuNzEsLTUuNDUzIC0zLjE4LC00LjAzMiAtOS40OSwtMTAuMjAzIC0xNi4yNCwtMTAuMjAzIC01Ljg5LDAgLTkuMiw1LjMxMiAtOS4yLDEzLjc5NiAwLDcuODkxIDQuNDUsMjMuOTg1IDcuMTksMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMywxNS4yMzQgOS40OCwwIDExLjM2LC0xMS43ODEgMTEuMzYsLTEyLjkzNyAwLC0wLjE0MSAtMC40NCwtMiAtMC41OCwtMi4yOTcgbCAtNy4wNSwtMjguMTU2IHogbSA5LjIxLDM2Ljc4MSBjIC0xLjU4LDMuNzM0IC01LjQ3LDkuNDg0IC0xMi45NCw5LjQ4NCAtMTYuMjMsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMywtMjIuNTYyIDE4LjA5LC0yMi41NjIgNy45MSwwIDE0LjY2LDYuMTcxIDE4LjY4LDEwLjkyMSAxLjQzLC04LjQ4NCA4LjE4LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEsMCA3Ljc2LDIuNTkzIDEwLjM0LDcuNzY1IDIuMyw0Ljg3NSA0LjMxLDEzLjY0MSA0LjMxLDE0LjIxOSAwLDAuNzE5IC0wLjU4LDEuMjgxIC0xLjQ0LDEuMjgxIC0xLjI5LDAgLTEuNDMsLTAuNzAzIC0yLjAxLC0yLjg1OSAtMi4xNCwtOC40ODUgLTQuODgsLTE3LjUzMSAtMTAuNzcsLTE3LjUzMSAtNC4xNywwIC00LjQ1LDMuNzM0IC00LjQ1LDYuNjA5IDAsMy4yOTcgMC40Miw0Ljg3NSAxLjcyLDEwLjQ4NCAxLjAxLDMuNTk0IDEuNzMsNi43NSAyLjg3LDEwLjkyMiA1LjMyLDIxLjU0NyA2LjYxLDI2LjcxOSA2LjYxLDI3LjU3OCAwLDIuMDE2IC0xLjU3LDMuNTk0IC0zLjczLDMuNTk0IC00LjU5LDAgLTUuNzUsLTUuMDMxIC02LjAzLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTkzOS42MSw1MTguNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4LC05LjE0IC0xOC41OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTcsLTUuNTYzIDUuMjYsLTUuNTYzIDEuNjksMCA1LjE2LDEuMjA0IDUuMTYsNS4yNjYgMCwyLjU5NCAtMS43OCw1LjE3MiAtNS4yNiw1LjE3MiAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDk0IDIuMjksNi40NTMgNy42NCwxMC4xMjUgMTMuNDEsMTAuMTI1IDkuMDUsMCAxMy4zMSwtOC4wNDcgMTMuMzEsLTE2LjE4NyAwLC03Ljk1MyAtNC45NywtMTUuNzk3IC0xMC40MywtMjEuOTUzIGwgLTE5LjA3LC0yMS4yNjYgYyAtMS4wOSwtMS4wOTQgLTEuMDksLTEuMjgxIC0xLjA5LC0zLjY3MiBsIDM2Ljg2LDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOSwtOC44NDMgLTAuNzEsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40NCwtMC43ODIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwMDcuMiw1NzQuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4LDIuNTc4IC02LjE1LC02LjM1OSAtMTQuOSwtNi4zNTkgLTE4LjA4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjMsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3LDAgMCwtMy4wNzggYyAzLjQ3LDAuMjk3IDEyLjEyLDAuMjk3IDE2LjA5LDAuMjk3IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk3IGwgMCwzLjA3OCAtMy4xOSwwIGMgLTguOTQsMCAtOS4yNCwxLjA5NCAtOS4yNCw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA4Ni44Niw2NDkuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA3Mi42Niw1NTMuNTQ3IGMgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4zLDAgLTEuNDQsLTAuNDIyIC0yLjE2LC0yLjg1OSAtMy43MywtMTMuMDc4IC05LjYyLC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzMsMCAtMy43MywwLjQzNyAtMy43Myw0LjczNCAwLDMuODkxIDEuNzIsOC4xODcgMy4zLDEyLjUgbCAxMC4wNiwyNi43MTkgYyAwLjQyLDEuMTU2IDEuNDQsMy43MzQgMS40NCw2LjQ2OCAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMDYyIDguOTEsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwtMC4xNTYgMy43NCwtNC43NSAwLC0zLjczNCAtMS44OCwtOC40NjggLTMuMDIsLTExLjYyNSBsIC0xMC4wNiwtMjYuNzM0IGMgLTAuODYsLTIuMjk3IC0xLjcyLC00LjU5NCAtMS43MiwtNy4xNzIgMCwtNi40NjkgNC40NiwtMTEuNjQgMTEuMzUsLTExLjY0IDEzLjIxLDAgMTguMzksMjAuOTY4IDE4LjM5LDIxLjk4NCB6IG0gLTEuMTYsNjkuMDk0IGMgMCwyLjE1NiAtMS43Miw0LjczNCAtNC44Nyw0LjczNCAtMy4zMiwwIC03LjA1LC0zLjE1NiAtNy4wNSwtNi44OTEgMCwtMy41OTMgMy4wMSwtNC43MzQgNC43NSwtNC43MzQgMy44NywwIDcuMTcsMy43MzQgNy4xNyw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMTY5LjMxLDU2Ni4xODggMzkuNjYsMCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgMzkuNjQsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTksLTQuNTkzIDIuNzIsMCAyLjcyLDIuNDM3IDIuNzIsNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjk1LjIzLDU1MC4wOTQgYyAtMC43MSwtMi40MzggLTAuNzEsLTIuNzM1IC0yLjcxLC01LjQ1MyAtMy4xOCwtNC4wMzIgLTkuNDksLTEwLjIwMyAtMTYuMjQsLTEwLjIwMyAtNS44OSwwIC05LjIsNS4zMTIgLTkuMiwxMy43OTYgMCw3Ljg5MSA0LjQ1LDIzLjk4NSA3LjE5LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjMsMTUuMjM0IDkuNDgsMCAxMS4zNiwtMTEuNzgxIDExLjM2LC0xMi45MzcgMCwtMC4xNDEgLTAuNDQsLTIgLTAuNTgsLTIuMjk3IGwgLTcuMDUsLTI4LjE1NiB6IG0gOS4yMSwzNi43ODEgYyAtMS41OCwzLjczNCAtNS40Nyw5LjQ4NCAtMTIuOTQsOS40ODQgLTE2LjIzLDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzMsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMzM4LjYxLDUxOC42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTA4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzODguNjEsNTE4LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjQ5NC44Niw2NDkuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjQ4MS4yOCw1NzguNTQ3IGMgMC41OCwyLjI5NyAwLjU4LDQuMjk3IDAuNTgsNC44NzUgMCw4LjMyOCAtNi4xOSwxMi45MzcgLTEyLjY0LDEyLjkzNyAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NCAtMjIuMjcsLTIxLjk4NCAwLC0wLjcxOSAwLjU3LC0xLjI5NyAxLjQzLC0xLjI5NyAxLjE1LDAgMS4yOSwwLjU3OCAyLjAxLDIuMDE2IDUuNzUsMTMuOTM3IDEyLjk0LDE4LjM5IDE4LjM5LDE4LjM5IDMuMDIsMCA0LjYsLTEuNTc4IDQuNiwtNi42MDkgMCwtMy40NTMgLTAuNDMsLTQuODkxIC0xLC03LjQ2OSBsIC0xMy42NiwtNTQuMTU2IGMgLTIuNzIsLTEwLjY0MSAtOS40NywtMTguNjg3IC0xNy4zOCwtMTguNjg3IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNyAzLjQ1LDAuNzE5IDYuMTgsMy40NTMgNi4xOCw2LjkwNiAwLDIuMjk3IC0xLjczLDQuNTk0IC00Ljg5LDQuNTk0IC0zLjczLDAgLTcuMTgsLTMuMTcyIC03LjE4LC03LjQ2OSAwLC01Ljg5IDYuMzIsLTguMzQzIDEyLjIxLC04LjM0MyA5LjkxLDAgMjIuOTksNy4zMjggMjYuNTgsMjEuNzAzIGwgMTMuMzYsNTMuMTU2IHogbSA1Ljg5LDQ0LjA5NCBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjUzNy41Miw1NjguNzY2IGMgMCwxMC45MjIgLTEuNDQsMjguNzM0IC05LjQ5LDQ1LjQwNiAtOC40OCwxNy4yMzQgLTIwLjI1LDI2LjU3OCAtMjEuODQsMjYuNTc4IC0wLjU2LDAgLTEuMjgsLTAuMjk3IC0xLjI4LC0xLjE1NiAwLC0wLjQzOCAwLC0wLjcxOSAyLjQzLC0zLjE1NiAxNC4zNiwtMTQuNTE2IDIyLjQxLC0zOC4yMTkgMjIuNDEsLTY3LjUxNiAwLC0yNy44NzUgLTYuNzUsLTUxLjg3NSAtMjMuNDEsLTY4LjgxMyAtMS40MywtMS4yOTYgLTEuNDMsLTEuNTkzIC0xLjQzLC0yLjAxNSAwLC0wLjg2IDAuNzIsLTEuMTU2IDEuMjgsLTEuMTU2IDEuODcsMCAxMy42NSwxMC4zNDMgMjAuNjksMjQuNDIxIDcuMzIsMTQuNjU3IDEwLjY0LDMwLjE3MiAxMC42NCw0Ny40MDciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjc4OS45Nyw1NzkuNTQ3IGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCA4NC42MSwwIHogbSAwLC0yNi43MTkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNSAtMi40MywyLjczNSAtNC41OSwyLjczNSBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU5NCAwLC0yLjcxOSAyLjQ1LC0yLjcxOSA0LjYxLC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjY5Ljk2OSwzMzcuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0MjguNjg4LDI1Ni4wOTQgYyAwLDAuNDIyIDAsMC43MTkgLTIuNDM4LDMuMTU2IC0xNC4zNzUsMTQuNTE2IC0yMi40MjIsMzguMjE5IC0yMi40MjIsNjcuNTE2IDAsMjcuODc1IDYuNzY2LDUxLjg1OSAyMy40MjIsNjguODEyIDEuNDM4LDEuMjk3IDEuNDM4LDEuNTc4IDEuNDM4LDIuMDE2IDAsMC44NTkgLTAuNzE5LDEuMTU2IC0xLjI5NywxLjE1NiAtMS44NiwwIC0xMy42NDEsLTEwLjM0NCAtMjAuNjg4LC0yNC40MjIgLTcuMzI4LC0xNC41MTUgLTEwLjYyNSwtMjkuODkgLTEwLjYyNSwtNDcuNTYyIDAsLTEyLjc4MiAyLjAxNiwtMjkuODc1IDkuNDg1LC00NS4yNSA4LjQ2OCwtMTcuMjM1IDIwLjI1LC0yNi41NzggMjEuODI4LC0yNi41NzggMC41NzgsMCAxLjI5NywwLjI5NiAxLjI5NywxLjE1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0ODAuMjM0LDMwOC4wOTQgYyAtMC43MTgsLTIuNDM4IC0wLjcxOCwtMi43MzUgLTIuNzE4LC01LjQ1MyAtMy4xNzIsLTQuMDMyIC05LjQ4NSwtMTAuMjAzIC0xNi4yMzUsLTEwLjIwMyAtNS44OSwwIC05LjIwMyw1LjMxMiAtOS4yMDMsMTMuNzk2IDAsNy44OTEgNC40NTMsMjMuOTg1IDcuMTg4LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYgeiBtIDkuMjA0LDM2Ljc4MSBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4LC0yMi41NjIgMTguMDk0LC0yMi41NjIgNy45MDYsMCAxNC42NTYsNi4xNzEgMTguNjcyLDEwLjkyMSAxLjQzNywtOC40ODQgOC4xODcsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMTIsMCA3Ljc2NSwyLjU5MyAxMC4zNDMsNy43NjUgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQxIDQuMzEzLDE0LjIxOSAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzgsMS4yODEgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMyAtMi4wMTUsLTIuODU5IC0yLjE0MSwtOC40ODUgLTQuODc1LC0xNy41MzEgLTEwLjc2NiwtMTcuNTMxIC00LjE3MiwwIC00LjQ1MywzLjczNCAtNC40NTMsNi42MDkgMCwzLjI5NyAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQgMS4wMTUsMy41OTQgMS43MzQsNi43NSAyLjg3NSwxMC45MjIgNS4zMTIsMjEuNTQ3IDYuNjA5LDI2LjcxOSA2LjYwOSwyNy41NzggMCwyLjAxNiAtMS41NzgsMy41OTQgLTMuNzM0LDMuNTk0IC00LjU5NCwwIC01Ljc1LC01LjAzMSAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTM5LjIwMywzMzIuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU4OS4yMDMsMzMyLjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2ODEuNjU2LDM0NC43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3MTQuMTI1LDM4OS4xODggYyAwLjUsMS4xODcgMC45MDYsMi4wNzggMC45MDYsMy4wNzggMCwyLjg3NSAtMi41OTMsNS4yNjUgLTUuNjcyLDUuMjY1IC0yLjc4MSwwIC00LjU2MiwtMS44OSAtNS4yNjUsLTQuNDY4IGwgLTExLjgxMywtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNDA2LC0xLjI5NyAtMC40MDYsLTEuMzkgMCwtMS4wOTQgMi41OTQsLTEuNzk3IDMuMzkxLC0xLjc5NyAwLjU5MywwIDAuNjg3LDAuMjk3IDEuMjgxLDEuNTk0IGwgMTcuNTc4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3MTcuMTcyLDI4NSBjIDAuNjA5LDIuNTc4IDIuODkxLDExLjcxOSA5Ljg0NCwxMS43MTkgMC41LDAgMi44NzUsMCA0Ljk2OCwtMS4yODEgLTIuNzgxLC0wLjUgLTQuNzY1LC0yLjk4NSAtNC43NjUsLTUuMzc1IDAsLTEuNTc5IDEuMDc4LC0zLjQ2OSAzLjc2NSwtMy40NjkgMi4xODgsMCA1LjM2LDEuNzgxIDUuMzYsNS43NSAwLDUuMTcyIC01Ljg2LDYuNTYyIC05LjIzNSw2LjU2MiAtNS43NjUsMCAtOS4yMzQsLTUuMjY1IC0xMC40MjEsLTcuNTQ3IC0yLjQ4NSw2LjU0NyAtNy44Niw3LjU0NyAtMTAuNzM1LDcuNTQ3IC0xMC4zMjgsMCAtMTYsLTEyLjgxMiAtMTYsLTE1LjI5NyAwLC0xIDEsLTEgMS4yMDMsLTEgMC43OTcsMCAxLjA5NCwwLjIwNCAxLjI4MiwxLjA5NCAzLjM5LDEwLjUzMSA5LjkzNywxMy4wMTYgMTMuMzEyLDEzLjAxNiAxLjg5MSwwIDUuMzc1LC0wLjg5MSA1LjM3NSwtNi42NTYgMCwtMy4wNzkgLTEuNjg3LC05LjczNSAtNS4zNzUsLTIzLjY0MSAtMS41NzgsLTYuMTU2IC01LjA2MiwtMTAuMzI4IC05LjQzNywtMTAuMzI4IC0wLjU5NCwwIC0yLjg3NSwwIC00Ljk2OSwxLjI5NyAyLjQ4NCwwLjQ4NCA0LjY3MiwyLjU3OCA0LjY3Miw1LjM1OSAwLDIuNjg4IC0yLjE4OCwzLjQ2OSAtMy42NzIsMy40NjkgLTIuOTg1LDAgLTUuNDY5LC0yLjU3OCAtNS40NjksLTUuNzUgMCwtNC41NzggNC45NjksLTYuNTYzIDkuMzQ0LC02LjU2MyA2LjU2MiwwIDEwLjEyNSw2Ljk1MyAxMC40MzcsNy41NDcgMS4xODgsLTMuNjcyIDQuNzY2LC03LjU0NyAxMC43MTksLTcuNTQ3IDEwLjIzNCwwIDE1Ljg5MSwxMi44MTMgMTUuODkxLDE1LjI5NyAwLDEgLTAuODkxLDEgLTEuMTg4LDEgLTAuODksMCAtMS4wOTQsLTAuNDA2IC0xLjI5NywtMS4wOTQgLTMuMjY1LC0xMC42MjUgLTEwLjAzMSwtMTMuMDE1IC0xMy4yMDMsLTEzLjAxNSAtMy44NzUsMCAtNS40NjksMy4xNzIgLTUuNDY5LDYuNTYyIDAsMi4xNzIgMC41OTQsNC4zNiAxLjY4OCw4LjczNSBMIDcxNy4xNzIsMjg1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTM0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgzMy4zMTMsMzI0LjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5NjEuMjM0LDMwOC4wOTQgYyAtMC43MTgsLTIuNDM4IC0wLjcxOCwtMi43MzUgLTIuNzE4LC01LjQ1MyAtMy4xNzIsLTQuMDMyIC05LjQ4NSwtMTAuMjAzIC0xNi4yMzUsLTEwLjIwMyAtNS44OSwwIC05LjIwMyw1LjMxMiAtOS4yMDMsMTMuNzk2IDAsNy44OTEgNC40NTMsMjMuOTg1IDcuMTg4LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYgeiBtIDkuMjA0LDM2Ljc4MSBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4LC0yMi41NjIgMTguMDk0LC0yMi41NjIgNy45MDYsMCAxNC42NTYsNi4xNzEgMTguNjcyLDEwLjkyMSAxLjQzNywtOC40ODQgOC4xODcsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMTIsMCA3Ljc2NSwyLjU5MyAxMC4zNDMsNy43NjUgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQxIDQuMzEzLDE0LjIxOSAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzgsMS4yODEgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMyAtMi4wMTUsLTIuODU5IC0yLjE0MSwtOC40ODUgLTQuODc1LC0xNy41MzEgLTEwLjc2NiwtMTcuNTMxIC00LjE3MiwwIC00LjQ1MywzLjczNCAtNC40NTMsNi42MDkgMCwzLjI5NyAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQgMS4wMTUsMy41OTQgMS43MzQsNi43NSAyLjg3NSwxMC45MjIgNS4zMTIsMjEuNTQ3IDYuNjA5LDI2LjcxOSA2LjYwOSwyNy41NzggMCwyLjAxNiAtMS41NzgsMy41OTQgLTMuNzM0LDMuNTk0IC00LjU5NCwwIC01Ljc1LC01LjAzMSAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAwMy42MSwyNzYuNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4MSwtOS4xNCAtMTguNTgxLC0xNy45ODQgMCwtNS41NjMgNC45NzEsLTUuNTYzIDUuMjYxLC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI4NiwtMC4wOTQgMi4yODYsNi40NTMgNy42MzYsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDY3LC0yMS4yNjYgYyAtMS4wOTQsLTEuMDk0IC0xLjA5NCwtMS4yODEgLTEuMDk0LC0zLjY3MiBsIDM2Ljg2MSwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTA3MS4yLDMzMi41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgsMi41NzggLTYuMTUsLTYuMzU5IC0xNC45LC02LjM1OSAtMTguMDgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk5LDAgNy44NSwwIDEzLjAyLDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMywtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcsMCAwLC0zLjA3OCBjIDMuNDcsMC4yOTcgMTIuMTIsMC4yOTcgMTYuMDksMC4yOTcgMy45NywwIDEyLjYxLDAgMTYuMSwtMC4yOTcgbCAwLDMuMDc4IC0zLjE5LDAgYyAtOC45NCwwIC05LjI0LDEuMDk0IC05LjI0LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE2Mi42NiwzNDQuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQ0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExOTUuMTMsMzg5LjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjEzLjI4LDI5Mi44NDQgYyAwLjM5LDEuMzkgMC4zOSwxLjU5NCAwLjM5LDIuMjgxIDAsMS43OTcgLTEuMzksMi42ODggLTIuODcsMi42ODggLTEsMCAtMi41OCwtMC41OTQgLTMuNDksLTIuMDc5IC0wLjE4LC0wLjUgLTAuOTgsLTMuNTc4IC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzggLTEuMzksLTUuMjY1IC0xLjk4LC03LjkzNyBsIC00LjQ3LC0xNy44OTEgYyAtMC4zOSwtMS40ODQgLTQuNjcsLTguNDM3IC0xMS4yMiwtOC40MzcgLTUuMDgsMCAtNi4xNiw0LjM3NSAtNi4xNiw4LjA0NyAwLDQuNTYyIDEuNjksMTAuNzM0IDUuMDcsMTkuNDY4IDEuNTcsNC4wNzkgMS45OCw1LjE3MiAxLjk4LDcuMTU3IDAsNC40NjggLTMuMTksOC4xNCAtOC4xNCw4LjE0IC05LjQ0LDAgLTEzLjEyLC0xNC40MDYgLTEzLjEyLC0xNS4yOTcgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwNCAxLjU4LDEuNzk3IDIuNjgsOS4zMjggNi42NSwxMi4zMTMgMTAuMDMsMTIuMzEzIDAuNzksMCAyLjQ4LDAgMi40OCwtMy4xNzIgMCwtMi40ODQgLTAuOTgsLTUuMDYzIC0xLjY5LC02Ljk1MyAtMy45NiwtMTAuNTMxIC01Ljc1LC0xNi4yMDMgLTUuNzUsLTIwLjg2IDAsLTguODQzIDYuMjUsLTExLjgyOCAxMi4xMSwtMTEuODI4IDMuODgsMCA3LjI1LDEuNjg4IDEwLjA0LDQuNDY5IC0xLjI5LC01LjE1NiAtMi40OSwtMTAuMDMxIC02LjQ2LC0xNS4yOTcgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI1IC0xMC45MiwtNi4yNSAtMS4zOSwwIC01Ljg2LDAuMjk3IC03LjU1LDQuMTcyIDEuNTgsMCAyLjg4LDAgNC4yNywxLjE4OCAxLDAuODkgMS45OCwyLjE4NyAxLjk4LDQuMDc4IDAsMy4wNzggLTIuNjgsMy40NjggLTMuNjcsMy40NjggLTIuMjgsMCAtNS41NiwtMS41OTMgLTUuNTYsLTYuNDUzIDAsLTQuOTY4IDQuMzcsLTguNjQgMTAuNTMsLTguNjQgMTAuMjMsMCAyMC40NSw5LjAzMSAyMy4yMywyMC4yNjUgbCA5LjU1LDM3LjkzOCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjYyLjUyLDMyNi43NjYgYyAwLDEwLjkyMiAtMS40NCwyOC43MzQgLTkuNDksNDUuNDA2IC04LjQ4LDE3LjIzNCAtMjAuMjUsMjYuNTc4IC0yMS44NCwyNi41NzggLTAuNTYsMCAtMS4yOCwtMC4yOTcgLTEuMjgsLTEuMTU2IDAsLTAuNDM4IDAsLTAuNzE5IDIuNDMsLTMuMTU2IDE0LjM2LC0xNC41MTYgMjIuNDEsLTM4LjIxOSAyMi40MSwtNjcuNTE2IDAsLTI3Ljg3NSAtNi43NSwtNTEuODc1IC0yMy40MSwtNjguODEzIC0xLjQzLC0xLjI5NiAtMS40MywtMS41OTMgLTEuNDMsLTIuMDE1IDAsLTAuODYgMC43MiwtMS4xNTYgMS4yOCwtMS4xNTYgMS44NywwIDEzLjY1LDEwLjM0MyAyMC42OSwyNC40MjEgNy4zMiwxNC42NTcgMTAuNjQsMzAuMTcyIDEwLjY0LDQ3LjQwNyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzMxLjg2LDQwOC43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzE3LjY2LDMxMS41NDcgYyAwLDAuNzE5IC0wLjU4LDEuMjgxIC0xLjQ0LDEuMjgxIC0xLjMsMCAtMS40NCwtMC40MjIgLTIuMTYsLTIuODU5IC0zLjczLC0xMy4wNzggLTkuNjIsLTE3LjUzMSAtMTQuMzYsLTE3LjUzMSAtMS43MywwIC0zLjczLDAuNDM3IC0zLjczLDQuNzM0IDAsMy44OTEgMS43Miw4LjE4NyAzLjMsMTIuNSBsIDEwLjA2LDI2LjcxOSBjIDAuNDIsMS4xNTYgMS40NCwzLjczNCAxLjQ0LDYuNDY4IDAsNi4wMzIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MyAtMTguNTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3LC0xLjI5NyAxLjU3LC0xLjI5NyAxLjMsMCAxLjQ0LDAuNTc4IDIuMDIsMi41OTQgMy40NSwxMi4wNjIgOC45MSwxNy44MTIgMTQuNTEsMTcuODEyIDEuMjksMCAzLjc0LC0wLjE1NiAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjg4LC04LjQ2OCAtMy4wMiwtMTEuNjI1IGwgLTEwLjA2LC0yNi43MzQgYyAtMC44NiwtMi4yOTcgLTEuNzIsLTQuNTk0IC0xLjcyLC03LjE3MiAwLC02LjQ2OSA0LjQ2LC0xMS42NCAxMS4zNSwtMTEuNjQgMTMuMjEsMCAxOC4zOSwyMC45NjggMTguMzksMjEuOTg0IHogbSAtMS4xNiw2OS4wOTQgYyAwLDIuMTU2IC0xLjcyLDQuNzM0IC00Ljg3LDQuNzM0IC0zLjMyLDAgLTcuMDUsLTMuMTU2IC03LjA1LC02Ljg5MSAwLC0zLjU5MyAzLjAxLC00LjczNCA0Ljc1LC00LjczNCAzLjg3LDAgNy4xNywzLjczNCA3LjE3LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0ODEuMzEsMzI0LjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCAzOS42NCwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OSwtNC41OTMgMi43MiwwIDIuNzIsMi40MzcgMi43Miw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE2NzkuNjksMjU2LjA5NCBjIDAsMC40MjIgMCwwLjcxOSAtMi40NCwzLjE1NiAtMTQuMzcsMTQuNTE2IC0yMi40MiwzOC4yMTkgLTIyLjQyLDY3LjUxNiAwLDI3Ljg3NSA2Ljc2LDUxLjg1OSAyMy40Miw2OC44MTIgMS40NCwxLjI5NyAxLjQ0LDEuNTc4IDEuNDQsMi4wMTYgMCwwLjg1OSAtMC43MiwxLjE1NiAtMS4zLDEuMTU2IC0xLjg2LDAgLTEzLjY0LC0xMC4zNDQgLTIwLjY5LC0yNC40MjIgLTcuMzIsLTE0LjUxNSAtMTAuNjIsLTI5Ljg5IC0xMC42MiwtNDcuNTYyIDAsLTEyLjc4MiAyLjAxLC0yOS44NzUgOS40OCwtNDUuMjUgOC40NywtMTcuMjM1IDIwLjI1LC0yNi41NzggMjEuODMsLTI2LjU3OCAwLjU4LDAgMS4zLDAuMjk2IDEuMywxLjE1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzMxLjIzLDMwOC4wOTQgYyAtMC43MSwtMi40MzggLTAuNzEsLTIuNzM1IC0yLjcxLC01LjQ1MyAtMy4xOCwtNC4wMzIgLTkuNDksLTEwLjIwMyAtMTYuMjQsLTEwLjIwMyAtNS44OSwwIC05LjIsNS4zMTIgLTkuMiwxMy43OTYgMCw3Ljg5MSA0LjQ1LDIzLjk4NSA3LjE5LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjMsMTUuMjM0IDkuNDgsMCAxMS4zNiwtMTEuNzgxIDExLjM2LC0xMi45MzcgMCwtMC4xNDEgLTAuNDQsLTIgLTAuNTgsLTIuMjk3IGwgLTcuMDUsLTI4LjE1NiB6IG0gOS4yMSwzNi43ODEgYyAtMS41OCwzLjczNCAtNS40Nyw5LjQ4NCAtMTIuOTQsOS40ODQgLTE2LjIzLDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzMsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzkxLjIsMzMyLjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yOCwyLjU3OCAtNi4xNSwtNi4zNTkgLTE0LjksLTYuMzU5IC0xOC4wOCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTksMCA3Ljg1LDAgMTMuMDIsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4zLC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNywwIDAsLTMuMDc4IGMgMy40NywwLjI5NyAxMi4xMiwwLjI5NyAxNi4wOSwwLjI5NyAzLjk3LDAgMTIuNjEsMCAxNi4xLC0wLjI5NyBsIDAsMy4wNzggLTMuMTksMCBjIC04Ljk0LDAgLTkuMjQsMS4wOTQgLTkuMjQsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxODI0LjYxLDI3Ni42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTY0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5MzEuNjYsMzQ0LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMSAtOC42MywtMzkuNjQgLTI1Ljg2LC0zOS42NCAtOC43NywwIC0xMC40OSw3LjMyOCAtMTAuNDksMTIuNjQgMCw3LjE4OCAzLjMsMTcuMjM1IDcuMTksMjcuNTc4IDIuMyw1Ljg5MSAyLjg4LDcuMzI4IDIuODgsMTAuMjAzIDAsNi4wMzIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MyAtMTguNTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3LC0xLjI5NyAxLjU3LC0xLjI5NyAxLjMsMCAxLjQ0LDAuNTc4IDIuMDIsMi41OTQgMy40NSwxMi4zNDQgOS4wNSwxNy44MTIgMTQuNTEsMTcuODEyIDEuMjksMCAzLjc0LDAgMy43NCwtNC43NSAwLC0zLjczNCAtMS41OCwtNy44OSAtMy43NCwtMTMuMzU5IC02LjksLTE4LjM5MSAtNi45LC0yMi44NDQgLTYuOSwtMjYuMjgxIDAsLTMuMTcyIDAuNDQsLTkuMDQ3IDQuODksLTEzLjA3OCA1LjE3LC00LjQ1MyAxMi4zNiwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDUsNDYuOTg0IDMyLjA1LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTY0LjEzLDM4OS4xODggYyAwLjUsMS4xODcgMC45LDIuMDc4IDAuOSwzLjA3OCAwLDIuODc1IC0yLjU5LDUuMjY1IC01LjY3LDUuMjY1IC0yLjc4LDAgLTQuNTYsLTEuODkgLTUuMjcsLTQuNDY4IGwgLTExLjgxLC00My40MDcgYyAwLC0wLjIwMyAtMC40LC0xLjI5NyAtMC40LC0xLjM5IDAsLTEuMDk0IDIuNTksLTEuNzk3IDMuMzksLTEuNzk3IDAuNTksMCAwLjY4LDAuMjk3IDEuMjgsMS41OTQgbCAxNy41OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTk2Ny4xNywyODUgYyAwLjYxLDIuNTc4IDIuODksMTEuNzE5IDkuODUsMTEuNzE5IDAuNSwwIDIuODcsMCA0Ljk2LC0xLjI4MSAtMi43OCwtMC41IC00Ljc2LC0yLjk4NSAtNC43NiwtNS4zNzUgMCwtMS41NzkgMS4wOCwtMy40NjkgMy43NiwtMy40NjkgMi4xOSwwIDUuMzYsMS43ODEgNS4zNiw1Ljc1IDAsNS4xNzIgLTUuODYsNi41NjIgLTkuMjMsNi41NjIgLTUuNzcsMCAtOS4yMywtNS4yNjUgLTEwLjQyLC03LjU0NyAtMi40OSw2LjU0NyAtNy44Niw3LjU0NyAtMTAuNzQsNy41NDcgLTEwLjMyLDAgLTE2LC0xMi44MTIgLTE2LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjEsLTEgMC43OSwwIDEuMDksMC4yMDQgMS4yOCwxLjA5NCAzLjM5LDEwLjUzMSA5Ljk0LDEzLjAxNiAxMy4zMSwxMy4wMTYgMS44OSwwIDUuMzgsLTAuODkxIDUuMzgsLTYuNjU2IDAsLTMuMDc5IC0xLjY5LC05LjczNSAtNS4zOCwtMjMuNjQxIC0xLjU4LC02LjE1NiAtNS4wNiwtMTAuMzI4IC05LjQ0LC0xMC4zMjggLTAuNTksMCAtMi44NywwIC00Ljk3LDEuMjk3IDIuNDksMC40ODQgNC42OCwyLjU3OCA0LjY4LDUuMzU5IDAsMi42ODggLTIuMTksMy40NjkgLTMuNjgsMy40NjkgLTIuOTgsMCAtNS40NiwtMi41NzggLTUuNDYsLTUuNzUgMCwtNC41NzggNC45NiwtNi41NjMgOS4zNCwtNi41NjMgNi41NiwwIDEwLjEyLDYuOTUzIDEwLjQ0LDcuNTQ3IDEuMTgsLTMuNjcyIDQuNzYsLTcuNTQ3IDEwLjcyLC03LjU0NyAxMC4yMywwIDE1Ljg5LDEyLjgxMyAxNS44OSwxNS4yOTcgMCwxIC0wLjg5LDEgLTEuMTksMSAtMC44OSwwIC0xLjEsLTAuNDA2IC0xLjMsLTEuMDk0IC0zLjI2LC0xMC42MjUgLTEwLjAzLC0xMy4wMTUgLTEzLjIsLTEzLjAxNSAtMy44OCwwIC01LjQ3LDMuMTcyIC01LjQ3LDYuNTYyIDAsMi4xNzIgMC41OSw0LjM2IDEuNjksOC43MzUgbCAzLjM3LDEzLjYwOSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE3MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDg1LjMxLDMyNC4xODggMzkuNjYsMCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgMzkuNjQsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTksLTQuNTkzIDIuNzIsMCAyLjcyLDIuNDM3IDIuNzIsNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE3MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjExLjIzLDMwOC4wOTQgYyAtMC43MSwtMi40MzggLTAuNzEsLTIuNzM1IC0yLjcxLC01LjQ1MyAtMy4xOCwtNC4wMzIgLTkuNDksLTEwLjIwMyAtMTYuMjQsLTEwLjIwMyAtNS44OSwwIC05LjIsNS4zMTIgLTkuMiwxMy43OTYgMCw3Ljg5MSA0LjQ1LDIzLjk4NSA3LjE5LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjMsMTUuMjM0IDkuNDgsMCAxMS4zNiwtMTEuNzgxIDExLjM2LC0xMi45MzcgMCwtMC4xNDEgLTAuNDQsLTIgLTAuNTgsLTIuMjk3IGwgLTcuMDUsLTI4LjE1NiB6IG0gOS4yMSwzNi43ODEgYyAtMS41OCwzLjczNCAtNS40Nyw5LjQ4NCAtMTIuOTQsOS40ODQgLTE2LjIzLDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzMsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE3NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjU0LjYxLDI3Ni42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzMDQuNjEsMjc2LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjQxMi42NiwzNDQuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI0NDUuMTMsMzg5LjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNDY0LjI4LDI5Mi44NDQgYyAwLjM5LDEuMzkgMC4zOSwxLjU5NCAwLjM5LDIuMjgxIDAsMS43OTcgLTEuMzksMi42ODggLTIuODcsMi42ODggLTEsMCAtMi41OCwtMC41OTQgLTMuNDksLTIuMDc5IC0wLjE4LC0wLjUgLTAuOTgsLTMuNTc4IC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzggLTEuMzksLTUuMjY1IC0xLjk4LC03LjkzNyBsIC00LjQ3LC0xNy44OTEgYyAtMC4zOSwtMS40ODQgLTQuNjcsLTguNDM3IC0xMS4yMiwtOC40MzcgLTUuMDgsMCAtNi4xNiw0LjM3NSAtNi4xNiw4LjA0NyAwLDQuNTYyIDEuNjksMTAuNzM0IDUuMDcsMTkuNDY4IDEuNTcsNC4wNzkgMS45OCw1LjE3MiAxLjk4LDcuMTU3IDAsNC40NjggLTMuMTksOC4xNCAtOC4xNCw4LjE0IC05LjQ0LDAgLTEzLjEyLC0xNC40MDYgLTEzLjEyLC0xNS4yOTcgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwNCAxLjU4LDEuNzk3IDIuNjgsOS4zMjggNi42NSwxMi4zMTMgMTAuMDMsMTIuMzEzIDAuNzksMCAyLjQ4LDAgMi40OCwtMy4xNzIgMCwtMi40ODQgLTAuOTgsLTUuMDYzIC0xLjY5LC02Ljk1MyAtMy45NiwtMTAuNTMxIC01Ljc1LC0xNi4yMDMgLTUuNzUsLTIwLjg2IDAsLTguODQzIDYuMjUsLTExLjgyOCAxMi4xMSwtMTEuODI4IDMuODgsMCA3LjI1LDEuNjg4IDEwLjA0LDQuNDY5IC0xLjI5LC01LjE1NiAtMi40OSwtMTAuMDMxIC02LjQ2LC0xNS4yOTcgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI1IC0xMC45MiwtNi4yNSAtMS4zOSwwIC01Ljg2LDAuMjk3IC03LjU1LDQuMTcyIDEuNTgsMCAyLjg4LDAgNC4yNywxLjE4OCAxLDAuODkgMS45OCwyLjE4NyAxLjk4LDQuMDc4IDAsMy4wNzggLTIuNjgsMy40NjggLTMuNjcsMy40NjggLTIuMjgsMCAtNS41NiwtMS41OTMgLTUuNTYsLTYuNDUzIDAsLTQuOTY4IDQuMzcsLTguNjQgMTAuNTMsLTguNjQgMTAuMjMsMCAyMC40NSw5LjAzMSAyMy4yMywyMC4yNjUgbCA5LjU1LDM3LjkzOCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNTEyLjUyLDMyNi43NjYgYyAwLDEwLjkyMiAtMS40NCwyOC43MzQgLTkuNDksNDUuNDA2IC04LjQ4LDE3LjIzNCAtMjAuMjUsMjYuNTc4IC0yMS44NCwyNi41NzggLTAuNTYsMCAtMS4yOCwtMC4yOTcgLTEuMjgsLTEuMTU2IDAsLTAuNDM4IDAsLTAuNzE5IDIuNDMsLTMuMTU2IDE0LjM2LC0xNC41MTYgMjIuNDEsLTM4LjIxOSAyMi40MSwtNjcuNTE2IDAsLTI3Ljg3NSAtNi43NSwtNTEuODc1IC0yMy40MSwtNjguODEzIC0xLjQzLC0xLjI5NiAtMS40MywtMS41OTMgLTEuNDMsLTIuMDE1IDAsLTAuODYgMC43MiwtMS4xNTYgMS4yOCwtMS4xNTYgMS44NywwIDEzLjY1LDEwLjM0MyAyMC42OSwyNC40MjEgNy4zMiwxNC42NTcgMTAuNjQsMzAuMTcyIDEwLjY0LDQ3LjQwNyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNTkwLjg2LDQwOC43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNTc3LjI4LDMzNi41NDcgYyAwLjU4LDIuMjk3IDAuNTgsNC4yOTcgMC41OCw0Ljg3NSAwLDguMzI4IC02LjE5LDEyLjkzNyAtMTIuNjQsMTIuOTM3IC0xNC41MiwwIC0yMi4yNywtMjAuOTg0IC0yMi4yNywtMjEuOTg0IDAsLTAuNzE5IDAuNTcsLTEuMjk3IDEuNDMsLTEuMjk3IDEuMTUsMCAxLjI5LDAuNTc4IDIuMDEsMi4wMTYgNS43NSwxMy45MzcgMTIuOTQsMTguMzkgMTguMzksMTguMzkgMy4wMiwwIDQuNiwtMS41NzggNC42LC02LjYwOSAwLC0zLjQ1MyAtMC40MywtNC44OTEgLTEsLTcuNDY5IGwgLTEzLjY2LC01NC4xNTYgYyAtMi43MiwtMTAuNjQxIC05LjQ3LC0xOC42ODcgLTE3LjM4LC0xOC42ODcgLTAuNTcsMCAtMy41OSwwIC02LjMyLDEuNDM3IDMuNDUsMC43MTkgNi4xOCwzLjQ1MyA2LjE4LDYuOTA2IDAsMi4yOTcgLTEuNzMsNC41OTQgLTQuODksNC41OTQgLTMuNzMsMCAtNy4xOCwtMy4xNzIgLTcuMTgsLTcuNDY5IDAsLTUuODkgNi4zMiwtOC4zNDMgMTIuMjEsLTguMzQzIDkuOTEsMCAyMi45OSw3LjMyOCAyNi41OCwyMS43MDMgbCAxMy4zNiw1My4xNTYgeiBtIDUuODksNDQuMDk0IGMgMCwzLjU5MyAtMy4wMSw0LjczNCAtNC43NSw0LjczNCAtMy44NywwIC03LjE3LC0zLjczNCAtNy4xNywtNi44OTEgMCwtMi4xNTYgMS43MiwtNC43MzQgNC44OCwtNC43MzQgMy4zMSwwIDcuMDQsMy4xNTYgNy4wNCw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNzg5Ljk3LDMzNy41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM1IC0yLjQzLDIuNzM1IC00LjU5LDIuNzM1IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTk0IDAsLTIuNzE5IDIuNDUsLTIuNzE5IDQuNjEsLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNTIwLjk3LDk0LjU0NjkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzgxIDAsMi43MzQ0IC0yLjQzLDIuNzM0NCAtNC41OSwyLjczNDQgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzgxIDAsLTIuNzM0NCAyLjQ1LC0yLjczNDQgNC42MSwtMi43MzQ0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE4OCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3ODIgMCwyLjczNDMgLTIuNDMsMi43MzQzIC00LjU5LDIuNzM0MyBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU5MzcgMCwtMi43MTg4IDIuNDUsLTIuNzE4OCA0LjYxLC0yLjcxODggbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTk0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4ODguNjYsMTAxLjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxNSA1LjE3LC0xMi42NTU5IDAsLTYuMDMxMiAtOC42MywtMzkuNjQwNiAtMjUuODYsLTM5LjY0MDYgLTguNzcsMCAtMTAuNDksNy4zMjgxIC0xMC40OSwxMi42NDA2IDAsNy4xODc1IDMuMywxNy4yMzQ0IDcuMTksMjcuNTc4MiAyLjMsNS44OTA2IDIuODgsNy4zMjgxIDIuODgsMTAuMjAzMSAwLDYuMDMxNiAtNC4zMiwxMS40OTk2IC0xMS4zNiwxMS40OTk2IC0xMy4yMiwwIC0xOC41MywtMjAuODQzNCAtMTguNTMsLTIxLjk4NCAwLC0wLjU3ODEgMC41NywtMS4yOTY5IDEuNTcsLTEuMjk2OSAxLjMsMCAxLjQ0LDAuNTc4MiAyLjAyLDIuNTkzOCAzLjQ1LDEyLjM0NDEgOS4wNSwxNy44MTIxIDE0LjUxLDE3LjgxMjEgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5MDIgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTA2IC02LjksLTIyLjg0MzcgLTYuOSwtMjYuMjgxMiAwLC0zLjE3MTkgMC40NCwtOS4wNDY5IDQuODksLTEzLjA3ODIgNS4xNywtNC40NTMxIDEyLjM2LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA1LDQ2Ljk4NDQgMzIuMDUsNTUuMTcxNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTI0LjE3LDU3IGMgMC42MSwyLjU3ODEgMi44OSwxMS43MTg4IDkuODUsMTEuNzE4OCAwLjUsMCAyLjg3LDAgNC45NiwtMS4yODEzIC0yLjc4LC0wLjUgLTQuNzYsLTIuOTg0NCAtNC43NiwtNS4zNzUgMCwtMS41NzgxIDEuMDgsLTMuNDY4NyAzLjc2LC0zLjQ2ODcgMi4xOSwwIDUuMzYsMS43ODEyIDUuMzYsNS43NSAwLDUuMTcxOCAtNS44Niw2LjU2MjUgLTkuMjMsNi41NjI1IC01Ljc3LDAgLTkuMjMsLTUuMjY1NyAtMTAuNDIsLTcuNTQ2OSAtMi40OSw2LjU0NjkgLTcuODYsNy41NDY5IC0xMC43NCw3LjU0NjkgLTEwLjMyLDAgLTE2LC0xMi44MTI1IC0xNiwtMTUuMjk2OSAwLC0xIDEsLTEgMS4yMSwtMSAwLjc5LDAgMS4wOSwwLjIwMzEgMS4yOCwxLjA5MzcgMy4zOSwxMC41MzEzIDkuOTQsMTMuMDE1NyAxMy4zMSwxMy4wMTU3IDEuODksMCA1LjM4LC0wLjg5MDcgNS4zOCwtNi42NTYzIDAsLTMuMDc4MSAtMS42OSwtOS43MzQ0IC01LjM4LC0yMy42NDA2IC0xLjU4LC02LjE1NjMgLTUuMDYsLTEwLjMyODEgLTkuNDQsLTEwLjMyODEgLTAuNTksMCAtMi44NywwIC00Ljk3LDEuMjk2OCAyLjQ5LDAuNDg0NCA0LjY4LDIuNTc4MiA0LjY4LDUuMzU5NCAwLDIuNjg3NSAtMi4xOSwzLjQ2ODggLTMuNjgsMy40Njg4IC0yLjk4LDAgLTUuNDYsLTIuNTc4MiAtNS40NiwtNS43NSAwLC00LjU3ODIgNC45NiwtNi41NjI1IDkuMzQsLTYuNTYyNSA2LjU2LDAgMTAuMTIsNi45NTMxIDEwLjQ0LDcuNTQ2OCAxLjE4LC0zLjY3MTggNC43NiwtNy41NDY4IDEwLjcyLC03LjU0NjggMTAuMjMsMCAxNS44OSwxMi44MTI1IDE1Ljg5LDE1LjI5NjggMCwxIC0wLjg5LDEgLTEuMTksMSAtMC44OSwwIC0xLjEsLTAuNDA2MiAtMS4zLC0xLjA5MzcgLTMuMjYsLTEwLjYyNSAtMTAuMDMsLTEzLjAxNTYgLTEzLjIsLTEzLjAxNTYgLTMuODgsMCAtNS40NywzLjE3MTggLTUuNDcsNi41NjI1IDAsMi4xNzE4IDAuNTksNC4zNTkzIDEuNjksOC43MzQzIEwgMTkyNC4xNyw1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDA2Ljg2LDE2Ni43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIwMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTkyLjY2LDY4LjU0NjkgYyAwLDAuNzE4NyAtMC41OCwxLjI4MTIgLTEuNDQsMS4yODEyIC0xLjMsMCAtMS40NCwtMC40MjE4IC0yLjE2LC0yLjg1OTMgLTMuNzMsLTEzLjA3ODIgLTkuNjIsLTE3LjUzMTMgLTE0LjM2LC0xNy41MzEzIC0xLjczLDAgLTMuNzMsMC40Mzc1IC0zLjczLDQuNzM0NCAwLDMuODkwNiAxLjcyLDguMTg3NSAzLjMsMTIuNSBsIDEwLjA2LDI2LjcxODcgYyAwLjQyLDEuMTU2MyAxLjQ0LDMuNzM0NCAxLjQ0LDYuNDY4OCAwLDYuMDMxNiAtNC4zMiwxMS40OTk2IC0xMS4zNiwxMS40OTk2IC0xMy4yMiwwIC0xOC41MywtMjAuODQzNCAtMTguNTMsLTIxLjk4NCAwLC0wLjU3ODEgMC41NywtMS4yOTY5IDEuNTcsLTEuMjk2OSAxLjMsMCAxLjQ0LDAuNTc4MiAyLjAyLDIuNTkzOCAzLjQ1LDEyLjA2MjEgOC45MSwxNy44MTIxIDE0LjUxLDE3LjgxMjEgMS4yOSwwIDMuNzQsLTAuMTU2IDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuODgsLTguNDY4NCAtMy4wMiwtMTEuNjI0NiBMIDE5NjQuNjQsNjUuMzc1IGMgLTAuODYsLTIuMjk2OSAtMS43MiwtNC41OTM3IC0xLjcyLC03LjE3MTkgMCwtNi40Njg3IDQuNDYsLTExLjY0MDYgMTEuMzUsLTExLjY0MDYgMTMuMjEsMCAxOC4zOSwyMC45Njg4IDE4LjM5LDIxLjk4NDQgeiBtIC0xLjE2LDY5LjA5NDEgYyAwLDIuMTU2IC0xLjcyLDQuNzM0IC00Ljg3LDQuNzM0IC0zLjMyLDAgLTcuMDUsLTMuMTU2IC03LjA1LC02Ljg5MSAwLC0zLjU5MyAzLjAxLC00LjczNCA0Ljc1LC00LjczNCAzLjg3LDAgNy4xNywzLjczNCA3LjE3LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjAyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwODkuMzEsODEuMTg3NSAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4MSAwLDIuNzM0NCAtMi40MywyLjczNDQgLTQuNTksMi43MzQ0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4MSAwLC0yLjczNDQgMi40NSwtMi43MzQ0IDQuNjEsLTIuNzM0NCBsIDM5LjY0LDAgMCwtMzkuNjU2MiBjIDAsLTIgMCwtNC41OTM4IDIuNTksLTQuNTkzOCAyLjcyLDAgMi43MiwyLjQzNzUgMi43Miw0LjU5MzggbCAwLDM5LjY1NjIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjIzOC42NiwxMDEuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzE1IDUuMTcsLTEyLjY1NTkgMCwtNi4wMzEyIC04LjYzLC0zOS42NDA2IC0yNS44NiwtMzkuNjQwNiAtOC43NywwIC0xMC40OSw3LjMyODEgLTEwLjQ5LDEyLjY0MDYgMCw3LjE4NzUgMy4zLDE3LjIzNDQgNy4xOSwyNy41NzgyIDIuMyw1Ljg5MDYgMi44OCw3LjMyODEgMi44OCwxMC4yMDMxIDAsNi4wMzE2IC00LjMyLDExLjQ5OTYgLTExLjM2LDExLjQ5OTYgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDM0IC0xOC41MywtMjEuOTg0IDAsLTAuNTc4MSAwLjU3LC0xLjI5NjkgMS41NywtMS4yOTY5IDEuMywwIDEuNDQsMC41NzgyIDIuMDIsMi41OTM4IDMuNDUsMTIuMzQ0MSA5LjA1LDE3LjgxMjEgMTQuNTEsMTcuODEyMSAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkwMiAtMy43NCwtMTMuMzU5IC02LjksLTE4LjM5MDYgLTYuOSwtMjIuODQzNyAtNi45LC0yNi4yODEyIDAsLTMuMTcxOSAwLjQ0LC05LjA0NjkgNC44OSwtMTMuMDc4MiA1LjE3LC00LjQ1MzEgMTIuMzYsLTQuNDUzMSAxMy42NCwtNC40NTMxIDIzLjg2LDAgMzIuMDUsNDYuOTg0NCAzMi4wNSw1NS4xNzE1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjA2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIyOTAuMjgsNjQuODQzOCBjIDAuMzksMS4zOTA2IDAuMzksMS41OTM3IDAuMzksMi4yODEyIDAsMS43OTY5IC0xLjM5LDIuNjg3NSAtMi44NywyLjY4NzUgLTEsMCAtMi41OCwtMC41OTM3IC0zLjQ5LC0yLjA3ODEgLTAuMTgsLTAuNSAtMC45OCwtMy41NzgxIC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzgxIC0xLjM5LC01LjI2NTYgLTEuOTgsLTcuOTM3NSBsIC00LjQ3LC0xNy44OTA2IGMgLTAuMzksLTEuNDg0NCAtNC42NywtOC40Mzc1IC0xMS4yMiwtOC40Mzc1IC01LjA4LDAgLTYuMTYsNC4zNzUgLTYuMTYsOC4wNDY4IDAsNC41NjI1IDEuNjksMTAuNzM0NCA1LjA3LDE5LjQ2ODggMS41Nyw0LjA3ODEgMS45OCw1LjE3MTkgMS45OCw3LjE1NjIgMCw0LjQ2ODggLTMuMTksOC4xNDA3IC04LjE0LDguMTQwNyAtOS40NCwwIC0xMy4xMiwtMTQuNDA2MyAtMTMuMTIsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwMzEgMS41OCwxLjc5NjkgMi42OCw5LjMyODEgNi42NSwxMi4zMTI1IDEwLjAzLDEyLjMxMjUgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MTkgMCwtMi40ODQ0IC0wLjk4LC01LjA2MjUgLTEuNjksLTYuOTUzMSAtMy45NiwtMTAuNTMxMyAtNS43NSwtMTYuMjAzMiAtNS43NSwtMjAuODU5NCAwLC04Ljg0MzggNi4yNSwtMTEuODI4MSAxMi4xMSwtMTEuODI4MSAzLjg4LDAgNy4yNSwxLjY4NzUgMTAuMDQsNC40Njg3IC0xLjI5LC01LjE1NjIgLTIuNDksLTEwLjAzMTIgLTYuNDYsLTE1LjI5NjkgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI0OTk3IC0xMC45MiwtNi4yNDk5NyAtMS4zOSwwIC01Ljg2LDAuMjk2ODcgLTcuNTUsNC4xNzE4NyAxLjU4LDAgMi44OCwwIDQuMjcsMS4xODc1IDEsMC44OTA2IDEuOTgsMi4xODc1IDEuOTgsNC4wNzgxIDAsMy4wNzgyIC0yLjY4LDMuNDY4OCAtMy42NywzLjQ2ODggLTIuMjgsMCAtNS41NiwtMS41OTM4IC01LjU2LC02LjQ1MzEgMCwtNC45Njg4IDQuMzcsLTguNjQwNjcgMTAuNTMsLTguNjQwNjcgMTAuMjMsMCAyMC40NSw5LjAzMTI3IDIzLjIzLDIwLjI2NTY3IGwgOS41NSwzNy45Mzc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjA4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzNjEuODYsMTY2Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjEwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzNDguMjgsOTMuNTQ2OSBjIDAuNTgsMi4yOTY5IDAuNTgsNC4yOTY5IDAuNTgsNC44NzUgMCw4LjMyODEgLTYuMTksMTIuOTM3MSAtMTIuNjQsMTIuOTM3MSAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NCAtMjIuMjcsLTIxLjk4NCAwLC0wLjcxODcgMC41NywtMS4yOTY5IDEuNDMsLTEuMjk2OSAxLjE1LDAgMS4yOSwwLjU3ODIgMi4wMSwyLjAxNTcgNS43NSwxMy45MzcyIDEyLjk0LDE4LjM5MDIgMTguMzksMTguMzkwMiAzLjAyLDAgNC42LC0xLjU3OCA0LjYsLTYuNjA5IDAsLTMuNDUzMSAtMC40MywtNC44OTA2IC0xLC03LjQ2ODcgTCAyMzI1LjcyLDQwLjI1IGMgLTIuNzIsLTEwLjY0MDYgLTkuNDcsLTE4LjY4NzUgLTE3LjM4LC0xOC42ODc1IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNzUgMy40NSwwLjcxODggNi4xOCwzLjQ1MzEgNi4xOCw2LjkwNjMgMCwyLjI5NjggLTEuNzMsNC41OTM3IC00Ljg5LDQuNTkzNyAtMy43MywwIC03LjE4LC0zLjE3MTkgLTcuMTgsLTcuNDY4NyAwLC01Ljg5MDcgNi4zMiwtOC4zNDM4IDEyLjIxLC04LjM0MzggOS45MSwwIDIyLjk5LDcuMzI4MSAyNi41OCwyMS43MDMxIGwgMTMuMzYsNTMuMTU2MyB6IG0gNS44OSw0NC4wOTQxIGMgMCwzLjU5MyAtMy4wMSw0LjczNCAtNC43NSw0LjczNCAtMy44NywwIC03LjE3LC0zLjczNCAtNy4xNywtNi44OTEgMCwtMi4xNTYgMS43MiwtNC43MzQgNC44OCwtNC43MzQgMy4zMSwwIDcuMDQsMy4xNTYgNy4wNCw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIxMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMzkwLjQ0LDU0Ljg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48L2c+PC9nPjwvc3ZnPg==)
![≤ft{\begin{matrix}a_{11}v'_x&+&a_{21}v'_y&=& v_x,\\[2mm]a_{12}v'_x&+&a_{22}v'_y&=& v_y.\end{matrix}\right.](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDE1MCA0NCIKICAgaGVpZ2h0PSI0NCIKICAgd2lkdGg9IjE1MCIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDQ0KSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTIuNzk2OSwxNjMuNTQ3IGMgMCwxNS43OTcgLTEwLjkyMTksNDAuMDc4IC0zNS45MjE5LDUyLjcxOSAxNS41MTU2LDguMzI4IDM0LjA0NjksMjUuMTQgMzUuNzY1Niw1MiBsIDAuMTU2MywwLjg1OSAwLDk5LjU2MyBjIDAsMTEuNzY1IDAsMTQuMzU5IDEuMTQwNiwxOS44MTIgMi41OTM4LDExLjUgOS40ODQ0LDI1LjcxOSAyNy43MzQ0LDM2LjUgMS4xNDA2LDAuNzE5IDEuMjgxMiwwLjg1OSAxLjI4MTIsMy40MzggMCwzLjE3MSAtMC4xNDA2LDMuMzEyIC0zLjI5NjgsMy4zMTIgLTIuNTkzOCwwIC0yLjg3NSwwIC02Ljc1LC0yLjI5NyAtMzIuMTg3NSwtMTguMjUgLTM0LjA0NjksLTQ0Ljk2OSAtMzQuMDQ2OSwtNTAgbCAwLC0xMDIuMTQgYyAwLC0xMC4zNDQgMCwtMjEuOTg1IC03LjQ2ODgsLTM1LjE4OCAtNi42MDkzLC0xMS43ODEgLTE0LjM3NSwtMTcuNjcyIC0yMC41NDY4LC0yMS44NDQgLTIuMDE1NjcsLTEuMjk3IC0yLjE1NjMsLTEuNDM3IC0yLjE1NjMsLTMuODc1IDAsLTIuNTkzIDAuMTQwNjMsLTIuNzM0IDEuMjk2ODgsLTMuNDUzIDEyLjIwMzEyLC04LjA0NyAyNS4yODEyMiwtMjAuODI4IDI4LjQzNzUyLC00NC4yNSAwLjQzNzUsLTMuMTU2IDAuNDM3NSwtMy40MzcgMC40Mzc1LC01LjE1NiBsIDAsLTExMC4zNDM5IGMgMCwtMTEuNjI1IDcuMTcxOSwtMzUuNzY1NiAzNC45MDYyLC01MC40MjE4NSAzLjI5NjksLTEuODU5Mzc1IDMuNTkzOCwtMS44NTkzNzUgNS44OTA3LC0xLjg1OTM3NSAzLjE1NjIsMCAzLjI5NjgsMC4xNDA2MjUgMy4yOTY4LDMuMjk2ODc1IDAsMi41OTM3NSAtMC4xNDA2LDIuNzM0MzggLTAuNzE4NywzLjAxNTYzIEMgNzYuMDYyNSwxMS4xMjUgNTcuMjUsMjIuNDY4OCA1My4zNTk0LDQ3LjQ2ODggYyAtMC41NjI1LDMuNzM0MyAtMC41NjI1LDQuMDE1NiAtMC41NjI1LDUuODkwNiBsIDAsMTEwLjE4NzYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNDguMjM0LDMxNS4wOTQgYyAtMC43MTgsLTIuNDM4IC0wLjcxOCwtMi43MzUgLTIuNzE4LC01LjQ1MyAtMy4xNzIsLTQuMDMyIC05LjQ4NSwtMTAuMjAzIC0xNi4yMzUsLTEwLjIwMyAtNS44OSwwIC05LjIwMyw1LjMxMiAtOS4yMDMsMTMuNzk2IDAsNy44OTEgNC40NTMsMjMuOTg1IDcuMTg4LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYgeiBtIDkuMjA0LDM2Ljc4MSBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4LC0yMi41NjIgMTguMDk0LC0yMi41NjIgNy45MDYsMCAxNC42NTYsNi4xNzEgMTguNjcyLDEwLjkyMSAxLjQzNywtOC40ODQgOC4xODcsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMTIsMCA3Ljc2NSwyLjU5MyAxMC4zNDMsNy43NjUgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQxIDQuMzEzLDE0LjIxOSAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzgsMS4yODEgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMyAtMi4wMTUsLTIuODU5IC0yLjE0MSwtOC40ODUgLTQuODc1LC0xNy41MzEgLTEwLjc2NiwtMTcuNTMxIC00LjE3MiwwIC00LjQ1MywzLjczNCAtNC40NTMsNi42MDkgMCwzLjI5NyAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQgMS4wMTUsMy41OTQgMS43MzQsNi43NSAyLjg3NSwxMC45MjIgNS4zMTIsMjEuNTQ3IDYuNjA5LDI2LjcxOSA2LjYwOSwyNy41NzggMCwyLjAxNiAtMS41NzgsMy41OTQgLTMuNzM0LDMuNTk0IC00LjU5NCwwIC01Ljc1LC01LjAzMSAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDcuMjAzLDMzOS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNTcuMjAzLDMzOS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzNDcuNjU2LDM1MS43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDI0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDM4MS4xMjUsMzk2LjE4OCBjIDAuNSwxLjE4NyAwLjkwNiwyLjA3OCAwLjkwNiwzLjA3OCAwLDIuODc1IC0yLjU5Myw1LjI2NSAtNS42NzIsNS4yNjUgLTIuNzgxLDAgLTQuNTYyLC0xLjg5IC01LjI2NSwtNC40NjggbCAtMTEuODEzLC00My40MDcgYyAwLC0wLjIwMyAtMC40MDYsLTEuMjk3IC0wLjQwNiwtMS4zOSAwLC0xLjA5NCAyLjU5NCwtMS43OTcgMy4zOTEsLTEuNzk3IDAuNTkzLDAgMC42ODcsMC4yOTcgMS4yODEsMS41OTQgbCAxNy41NzgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzg0LjE3MiwyOTIgYyAwLjYwOSwyLjU3OCAyLjg5MSwxMS43MTkgOS44NDQsMTEuNzE5IDAuNSwwIDIuODc1LDAgNC45NjgsLTEuMjgxIC0yLjc4MSwtMC41IC00Ljc2NSwtMi45ODUgLTQuNzY1LC01LjM3NSAwLC0xLjU3OSAxLjA3OCwtMy40NjkgMy43NjUsLTMuNDY5IDIuMTg4LDAgNS4zNiwxLjc4MSA1LjM2LDUuNzUgMCw1LjE3MiAtNS44Niw2LjU2MiAtOS4yMzUsNi41NjIgLTUuNzY1LDAgLTkuMjM0LC01LjI2NSAtMTAuNDIxLC03LjU0NyAtMi40ODUsNi41NDcgLTcuODYsNy41NDcgLTEwLjczNSw3LjU0NyAtMTAuMzI4LDAgLTE2LC0xMi44MTIgLTE2LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjAzLC0xIDAuNzk3LDAgMS4wOTQsMC4yMDQgMS4yODIsMS4wOTQgMy4zOSwxMC41MzEgOS45MzcsMTMuMDE2IDEzLjMxMiwxMy4wMTYgMS44OTEsMCA1LjM3NSwtMC44OTEgNS4zNzUsLTYuNjU2IDAsLTMuMDc5IC0xLjY4NywtOS43MzUgLTUuMzc1LC0yMy42NDEgLTEuNTc4LC02LjE1NiAtNS4wNjIsLTEwLjMyOCAtOS40MzcsLTEwLjMyOCAtMC41OTQsMCAtMi44NzUsMCAtNC45NjksMS4yOTcgMi40ODQsMC40ODQgNC42NzIsMi41NzggNC42NzIsNS4zNTkgMCwyLjY4OCAtMi4xODgsMy40NjkgLTMuNjcyLDMuNDY5IC0yLjk4NSwwIC01LjQ2OSwtMi41NzggLTUuNDY5LC01Ljc1IDAsLTQuNTc4IDQuOTY5LC02LjU2MyA5LjM0NCwtNi41NjMgNi41NjIsMCAxMC4xMjUsNi45NTMgMTAuNDM3LDcuNTQ3IDEuMTg4LC0zLjY3MiA0Ljc2NiwtNy41NDcgMTAuNzE5LC03LjU0NyAxMC4yMzQsMCAxNS44OTEsMTIuODEzIDE1Ljg5MSwxNS4yOTcgMCwxIC0wLjg5MSwxIC0xLjE4OCwxIC0wLjg5LDAgLTEuMDk0LC0wLjQwNiAtMS4yOTcsLTEuMDk0IC0zLjI2NSwtMTAuNjI1IC0xMC4wMzEsLTEzLjAxNSAtMTMuMjAzLC0xMy4wMTUgLTMuODc1LDAgLTUuNDY5LDMuMTcyIC01LjQ2OSw2LjU2MiAwLDIuMTcyIDAuNTk0LDQuMzYgMS42ODgsOC43MzUgTCAzODQuMTcyLDI5MiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDI4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU2OS4zMTMsMzMxLjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDc2My4yMzQsMzE1LjA5NCBjIC0wLjcxOCwtMi40MzggLTAuNzE4LC0yLjczNSAtMi43MTgsLTUuNDUzIC0zLjE3MiwtNC4wMzIgLTkuNDg1LC0xMC4yMDMgLTE2LjIzNSwtMTAuMjAzIC01Ljg5LDAgLTkuMjAzLDUuMzEyIC05LjIwMywxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xODgsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMzQsMTUuMjM0IDkuNDg0LDAgMTEuMzU5LC0xMS43ODEgMTEuMzU5LC0xMi45MzcgMCwtMC4xNDEgLTAuNDM3LC0yIC0wLjU3OCwtMi4yOTcgbCAtNy4wNDcsLTI4LjE1NiB6IG0gOS4yMDQsMzYuNzgxIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOTQsLTIyLjU2MiA3LjkwNiwwIDE0LjY1Niw2LjE3MSAxOC42NzIsMTAuOTIxIDEuNDM3LC04LjQ4NCA4LjE4NywtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxMiwwIDcuNzY1LDIuNTkzIDEwLjM0Myw3Ljc2NSAyLjI5Nyw0Ljg3NSA0LjMxMywxMy42NDEgNC4zMTMsMTQuMjE5IDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzOCwxLjI4MSAtMS4yOTYsMCAtMS40MzcsLTAuNzAzIC0yLjAxNSwtMi44NTkgLTIuMTQxLC04LjQ4NSAtNC44NzUsLTE3LjUzMSAtMTAuNzY2LC0xNy41MzEgLTQuMTcyLDAgLTQuNDUzLDMuNzM0IC00LjQ1Myw2LjYwOSAwLDMuMjk3IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NCAxLjAxNSwzLjU5NCAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMiA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgwNi42MDksMjgzLjY1NiAxMC41MzIsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDY4LDE5LjA3OCAyMS40NjgsMjkuMDE2IDAsMTEuMzI4IC04Ljk1MywxOS4yNjUgLTIxLjA2MiwxOS4yNjUgLTExLjIzNCwwIC0xOC41NzgsLTkuMTQgLTE4LjU3OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTY5LC01LjU2MyA1LjI2NSwtNS41NjMgMS42ODgsMCA1LjE1NywxLjIwNCA1LjE1Nyw1LjI2NiAwLDIuNTk0IC0xLjc4Miw1LjE3MiAtNS4yNjYsNS4xNzIgLTAuNzgxLDAgLTAuOTg0LDAgLTEuMjgxLC0wLjA5NCAyLjI4MSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MDYsMTAuMTI1IDkuMDQ3LDAgMTMuMzEzLC04LjA0NyAxMy4zMTMsLTE2LjE4NyAwLC03Ljk1MyAtNC45NjksLTE1Ljc5NyAtMTAuNDM4LC0yMS45NTMgbCAtMTkuMDYyLC0yMS4yNjYgYyAtMS4wOTQsLTEuMDk0IC0xLjA5NCwtMS4yODEgLTEuMDk0LC0zLjY3MiBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MSAtMi40ODQsMCBjIC0wLjUsLTIuOTg0IC0xLjIwMywtNy4zNDMgLTIuMTg3LC04Ljg0MyAtMC43MDQsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40MzgsLTAuNzgyIGwgLTE3Ljg5MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODczLjIwMywzMzkuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTY0LjY1NiwzNTEuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5OTcuMTI1LDM5Ni4xODggYyAwLjUsMS4xODcgMC45MDYsMi4wNzggMC45MDYsMy4wNzggMCwyLjg3NSAtMi41OTMsNS4yNjUgLTUuNjcyLDUuMjY1IC0yLjc4MSwwIC00LjU2MiwtMS44OSAtNS4yNjUsLTQuNDY4IGwgLTExLjgxMywtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNDA2LC0xLjI5NyAtMC40MDYsLTEuMzkgMCwtMS4wOTQgMi41OTQsLTEuNzk3IDMuMzkxLC0xLjc5NyAwLjU5MywwIDAuNjg3LDAuMjk3IDEuMjgxLDEuNTk0IGwgMTcuNTc4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMTYuMjgsMjk5Ljg0NCBjIDAuMzksMS4zOSAwLjM5LDEuNTk0IDAuMzksMi4yODEgMCwxLjc5NyAtMS4zOSwyLjY4OCAtMi44NywyLjY4OCAtMSwwIC0yLjU4LC0wLjU5NCAtMy40OSwtMi4wNzkgLTAuMTgsLTAuNSAtMC45OCwtMy41NzggLTEuMzksLTUuMzc1IC0wLjY5LC0yLjU3OCAtMS4zOSwtNS4yNjUgLTEuOTgsLTcuOTM3IGwgLTQuNDcsLTE3Ljg5MSBjIC0wLjM5LC0xLjQ4NCAtNC42NzMsLTguNDM3IC0xMS4yMiwtOC40MzcgLTUuMDc4LDAgLTYuMTU2LDQuMzc1IC02LjE1Niw4LjA0NyAwLDQuNTYyIDEuNjg3LDEwLjczNCA1LjA2MiwxOS40NjggMS41NzgsNC4wNzkgMS45ODUsNS4xNzIgMS45ODUsNy4xNTcgMCw0LjQ2OCAtMy4xODgsOC4xNCAtOC4xNDEsOC4xNCAtOS40MzcsMCAtMTMuMTI1LC0xNC40MDYgLTEzLjEyNSwtMTUuMjk3IDAsLTEgMSwtMSAxLjIwMywtMSAwLjk4NSwwIDEuMDk0LDAuMjA0IDEuNTc4LDEuNzk3IDIuNjg4LDkuMzI4IDYuNjU3LDEyLjMxMyAxMC4wMzIsMTIuMzEzIDAuNzk2LDAgMi40ODQsMCAyLjQ4NCwtMy4xNzIgMCwtMi40ODQgLTAuOTg0LC01LjA2MyAtMS42ODgsLTYuOTUzIC0zLjk2OCwtMTAuNTMxIC01Ljc1LC0xNi4yMDMgLTUuNzUsLTIwLjg2IDAsLTguODQzIDYuMjUsLTExLjgyOCAxMi4xMSwtMTEuODI4IDMuODc1LDAgNy4yNSwxLjY4OCAxMC4wMzYsNC40NjkgLTEuMjg2LC01LjE1NiAtMi40ODksLTEwLjAzMSAtNi40NTgsLTE1LjI5NyAtMi41NzgsLTMuMzc1IC02LjM1OSwtNi4yNSAtMTAuOTIyLC02LjI1IC0xLjM5MSwwIC01Ljg1OSwwLjI5NyAtNy41NDcsNC4xNzIgMS41NzgsMCAyLjg3NSwwIDQuMjY2LDEuMTg4IDEsMC44OSAxLjk4NCwyLjE4NyAxLjk4NCw0LjA3OCAwLDMuMDc4IC0yLjY4NywzLjQ2OCAtMy42NzIsMy40NjggLTIuMjgxLDAgLTUuNTYyLC0xLjU5MyAtNS41NjIsLTYuNDUzIDAsLTQuOTY4IDQuMzc1LC04LjY0IDEwLjUzMSwtOC42NCAxMC4yMzQsMCAyMC40NSw5LjAzMSAyMy4yMywyMC4yNjUgbCA5LjU1LDM3LjkzOCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMjAuOTcsMzQ0LjU0NyBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzUgLTIuNDMsMi43MzUgLTQuNTksMi43MzUgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTQgMCwtMi43MTkgMi40NSwtMi43MTkgNC42MSwtMi43MTkgbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTM5OS42NiwzNTEuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQzNS4xNywzMDYgYyAwLjYxLDIuNTc4IDIuODksMTEuNzE5IDkuODUsMTEuNzE5IDAuNSwwIDIuODcsMCA0Ljk2LC0xLjI4MSAtMi43OCwtMC41IC00Ljc2LC0yLjk4NSAtNC43NiwtNS4zNzUgMCwtMS41NzkgMS4wOCwtMy40NjkgMy43NiwtMy40NjkgMi4xOSwwIDUuMzYsMS43ODEgNS4zNiw1Ljc1IDAsNS4xNzIgLTUuODYsNi41NjIgLTkuMjMsNi41NjIgLTUuNzcsMCAtOS4yMywtNS4yNjUgLTEwLjQyLC03LjU0NyAtMi40OSw2LjU0NyAtNy44Niw3LjU0NyAtMTAuNzQsNy41NDcgLTEwLjMyLDAgLTE2LC0xMi44MTIgLTE2LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjEsLTEgMC43OSwwIDEuMDksMC4yMDQgMS4yOCwxLjA5NCAzLjM5LDEwLjUzMSA5Ljk0LDEzLjAxNiAxMy4zMSwxMy4wMTYgMS44OSwwIDUuMzgsLTAuODkxIDUuMzgsLTYuNjU2IDAsLTMuMDc5IC0xLjY5LC05LjczNSAtNS4zOCwtMjMuNjQxIC0xLjU4LC02LjE1NiAtNS4wNiwtMTAuMzI4IC05LjQ0LC0xMC4zMjggLTAuNTksMCAtMi44NywwIC00Ljk3LDEuMjk3IDIuNDksMC40ODQgNC42OCwyLjU3OCA0LjY4LDUuMzU5IDAsMi42ODggLTIuMTksMy40NjkgLTMuNjgsMy40NjkgLTIuOTgsMCAtNS40NiwtMi41NzggLTUuNDYsLTUuNzUgMCwtNC41NzggNC45NiwtNi41NjMgOS4zNCwtNi41NjMgNi41NiwwIDEwLjEyLDYuOTUzIDEwLjQ0LDcuNTQ3IDEuMTgsLTMuNjcyIDQuNzYsLTcuNTQ3IDEwLjcyLC03LjU0NyAxMC4yMywwIDE1Ljg5LDEyLjgxMyAxNS44OSwxNS4yOTcgMCwxIC0wLjg5LDEgLTEuMTksMSAtMC44OSwwIC0xLjEsLTAuNDA2IC0xLjMsLTEuMDk0IC0zLjI2LC0xMC42MjUgLTEwLjAzLC0xMy4wMTUgLTEzLjIsLTEzLjAxNSAtMy44OCwwIC01LjQ3LDMuMTcyIC01LjQ3LDYuNTYyIDAsMi4xNzIgMC41OSw0LjM2IDEuNjksOC43MzUgbCAzLjM3LDEzLjYwOSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0OTEuMDIsMjk3LjQyMiBjIDAsOC4zMjggLTIuNzQsMTQuNTE2IC04LjYzLDE0LjUxNiAtNC41OSwwIC02Ljg5LC0zLjczNSAtNi44OSwtNi44OTEgMCwtMy4xNzIgMi4xNiwtNy4wNDcgNy4wMywtNy4wNDcgMS44OCwwIDMuNDUsMC41NzggNC43NSwxLjg3NSAwLjI4LDAuMjgxIDAuNDIsMC4yODEgMC41OCwwLjI4MSAwLjI4LDAgMC4yOCwtMi4wMTUgMC4yOCwtMi43MzQgMCwtNC43MzQgLTAuODYsLTE0LjA3OCAtOS4xOSwtMjMuNDA2IC0xLjU5LC0xLjczNSAtMS41OSwtMi4wMTYgLTEuNTksLTIuMzEzIDAsLTAuNzAzIDAuNzIsLTEuNDIyIDEuNDQsLTEuNDIyIDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ4LjIzNCw4OS4wOTM4IGMgLTAuNzE4LC0yLjQzNzUgLTAuNzE4LC0yLjczNDQgLTIuNzE4LC01LjQ1MzIgLTMuMTcyLC00LjAzMTIgLTkuNDg1LC0xMC4yMDMxIC0xNi4yMzUsLTEwLjIwMzEgLTUuODksMCAtOS4yMDMsNS4zMTI1IC05LjIwMywxMy43OTY5IDAsNy44OTA2IDQuNDUzLDIzLjk4NDYgNy4xODgsMzAuMDE1NiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYyIHogbSA5LjIwNCwzNi43ODEyIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQ0IDguMzI4LC0yMi41NjI1IDE4LjA5NCwtMjIuNTYyNSA3LjkwNiwwIDE0LjY1Niw2LjE3MTkgMTguNjcyLDEwLjkyMTkgMS40MzcsLTguNDg0NCA4LjE4NywtMTAuOTIxOSAxMi41LC0xMC45MjE5IDQuMzEyLDAgNy43NjUsMi41OTM4IDEwLjM0Myw3Ljc2NTYgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQwNyA0LjMxMywxNC4yMTg4IDAsMC43MTg3IC0wLjU3OCwxLjI4MTIgLTEuNDM4LDEuMjgxMiAtMS4yOTYsMCAtMS40MzcsLTAuNzAzMSAtMi4wMTUsLTIuODU5MyAtMi4xNDEsLTguNDg0NCAtNC44NzUsLTE3LjUzMTMgLTEwLjc2NiwtMTcuNTMxMyAtNC4xNzIsMCAtNC40NTMsMy43MzQ0IC00LjQ1Myw2LjYwOTQgMCwzLjI5NjkgMC40MjIsNC44NzUgMS43MTksMTAuNDg0NCAxLjAxNSwzLjU5MzcgMS43MzQsNi43NSAyLjg3NSwxMC45MjE3IDUuMzEyLDIxLjU0NyA2LjYwOSwyNi43MTkgNi42MDksMjcuNTc4IDAsMi4wMTYgLTEuNTc4LDMuNTk0IC0zLjczNCwzLjU5NCAtNC41OTQsMCAtNS43NSwtNS4wMzEgLTYuMDMxLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA3LjIwMywxMTQuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzMiBjIDAsLTMuNTc4MiAtMC4yOTYsLTQuNzY1NyAtOS4yNSwtNC43NjU3IGwgLTMuMTcxLDAgMCwtMy4wNzgxIGMgMy40NjgsMC4yOTY5IDEyLjEyNSwwLjI5NjkgMTYuMDkzLDAuMjk2OSAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NjkgbCAwLDMuMDc4MSAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5MzggLTkuMjM1LDQuNzY1NyBsIDAsNTUuNzM0MiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI0MC42MDksNTguNjU2MyAxMC41MzIsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NjgsMTkuMDc4MSAyMS40NjgsMjkuMDE1NiAwLDExLjMyODQgLTguOTUzLDE5LjI2NTQgLTIxLjA2MiwxOS4yNjU0IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NDEgMCwtNS41NjI1IDQuOTY5LC01LjU2MjUgNS4yNjUsLTUuNTYyNSAxLjY4OCwwIDUuMTU3LDEuMjAzMSA1LjE1Nyw1LjI2NTYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDcgMTMuMzEzLC0xNi4xODc0IDAsLTcuOTUzMSAtNC45NjksLTE1Ljc5NjggLTEwLjQzOCwtMjEuOTUzMSBMIDIzNC4wNjMsNTQuNjcxOSBDIDIzMi45NjksNTMuNTc4MSAyMzIuOTY5LDUzLjM5MDYgMjMyLjk2OSw1MSBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MTMgLTIuNDg0LDAgYyAtMC41LC0yLjk4NDQgLTEuMjAzLC03LjM0MzggLTIuMTg3LC04Ljg0MzggLTAuNzA0LC0wLjc4MTIgLTcuMjUsLTAuNzgxMiAtOS40MzgsLTAuNzgxMiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDM0Ny42NTYsMTI1LjczNCBjIDAsOS4wNDcgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMgLTYuNjA5LC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU3OCwtMy4yOTcgMS40MzgsLTEuMjk2IDUuMTcyLC01LjE3MSA1LjE3MiwtMTIuNjU2IDAsLTYuMDMxIC04LjYyNSwtMzkuNjQwNSAtMjUuODU5LC0zOS42NDA1IC04Ljc2NiwwIC0xMC40ODUsNy4zMjgxIC0xMC40ODUsMTIuNjQwNiAwLDcuMTg3NSAzLjI5NywxNy4yMzQ5IDcuMTg4LDI3LjU3NzkgMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkwNiAtNi45MDYsLTIyLjg0MzcgLTYuOTA2LC0yNi4yODEyIDAsLTMuMTcxOSAwLjQzOCwtOS4wNDY5IDQuODkxLC0xMy4wNzgyIDUuMTcyLC00LjQ1MzEgMTIuMzU5LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA0Nyw0Ni45ODQ1IDMyLjA0Nyw1NS4xNzE1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzgxLjEyNSwxNzEuMTg4IGMgMC41LDEuMTg3IDAuOTA2LDIuMDc4IDAuOTA2LDMuMDc4IDAsMi44NzUgLTIuNTkzLDUuMjY1IC01LjY3Miw1LjI2NSAtMi43ODEsMCAtNC41NjIsLTEuODkgLTUuMjY1LC00LjQ2OCBsIC0xMS44MTMsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQwNiwtMS4yOTcgLTAuNDA2LC0xLjM5IDAsLTEuMDk0IDIuNTk0LC0xLjc5NyAzLjM5MSwtMS43OTcgMC41OTMsMCAwLjY4NywwLjI5NyAxLjI4MSwxLjU5NCBsIDE3LjU3OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzODQuMTcyLDY2IGMgMC42MDksMi41NzgxIDIuODkxLDExLjcxODggOS44NDQsMTEuNzE4OCAwLjUsMCAyLjg3NSwwIDQuOTY4LC0xLjI4MTMgLTIuNzgxLC0wLjUgLTQuNzY1LC0yLjk4NDQgLTQuNzY1LC01LjM3NSAwLC0xLjU3ODEgMS4wNzgsLTMuNDY4NyAzLjc2NSwtMy40Njg3IDIuMTg4LDAgNS4zNiwxLjc4MTIgNS4zNiw1Ljc1IDAsNS4xNzE4IC01Ljg2LDYuNTYyNSAtOS4yMzUsNi41NjI1IC01Ljc2NSwwIC05LjIzNCwtNS4yNjU3IC0xMC40MjEsLTcuNTQ2OSAtMi40ODUsNi41NDY5IC03Ljg2LDcuNTQ2OSAtMTAuNzM1LDcuNTQ2OSAtMTAuMzI4LDAgLTE2LC0xMi44MTI1IC0xNiwtMTUuMjk2OSAwLC0xIDEsLTEgMS4yMDMsLTEgMC43OTcsMCAxLjA5NCwwLjIwMzEgMS4yODIsMS4wOTM3IDMuMzksMTAuNTMxMyA5LjkzNywxMy4wMTU3IDEzLjMxMiwxMy4wMTU3IDEuODkxLDAgNS4zNzUsLTAuODkwNyA1LjM3NSwtNi42NTYzIDAsLTMuMDc4MSAtMS42ODcsLTkuNzM0NCAtNS4zNzUsLTIzLjY0MDYgLTEuNTc4LC02LjE1NjMgLTUuMDYyLC0xMC4zMjgxIC05LjQzNywtMTAuMzI4MSAtMC41OTQsMCAtMi44NzUsMCAtNC45NjksMS4yOTY4IDIuNDg0LDAuNDg0NCA0LjY3MiwyLjU3ODIgNC42NzIsNS4zNTk0IDAsMi42ODc1IC0yLjE4OCwzLjQ2ODggLTMuNjcyLDMuNDY4OCAtMi45ODUsMCAtNS40NjksLTIuNTc4MiAtNS40NjksLTUuNzUgMCwtNC41NzgyIDQuOTY5LC02LjU2MjUgOS4zNDQsLTYuNTYyNSA2LjU2MiwwIDEwLjEyNSw2Ljk1MzEgMTAuNDM3LDcuNTQ2OCAxLjE4OCwtMy42NzE4IDQuNzY2LC03LjU0NjggMTAuNzE5LC03LjU0NjggMTAuMjM0LDAgMTUuODkxLDEyLjgxMjUgMTUuODkxLDE1LjI5NjggMCwxIC0wLjg5MSwxIC0xLjE4OCwxIC0wLjg5LDAgLTEuMDk0LC0wLjQwNjIgLTEuMjk3LC0xLjA5MzcgLTMuMjY1LC0xMC42MjUgLTEwLjAzMSwtMTMuMDE1NiAtMTMuMjAzLC0xMy4wMTU2IC0zLjg3NSwwIC01LjQ2OSwzLjE3MTggLTUuNDY5LDYuNTYyNSAwLDIuMTcxOCAwLjU5NCw0LjM1OTMgMS42ODgsOC43MzQzIEwgMzg0LjE3Miw2NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDYyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU2OS4zMTMsMTA1LjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NjcgYyAwLC0yIDAsLTQuNTkzOCAyLjU5NCwtNC41OTM4IDIuNzE5LDAgMi43MTksMi40Mzc1IDIuNzE5LDQuNTkzOCBsIDAsMzkuNjU2NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDc2My4yMzQsODkuMDkzOCBjIC0wLjcxOCwtMi40Mzc1IC0wLjcxOCwtMi43MzQ0IC0yLjcxOCwtNS40NTMyIC0zLjE3MiwtNC4wMzEyIC05LjQ4NSwtMTAuMjAzMSAtMTYuMjM1LC0xMC4yMDMxIC01Ljg5LDAgLTkuMjAzLDUuMzEyNSAtOS4yMDMsMTMuNzk2OSAwLDcuODkwNiA0LjQ1MywyMy45ODQ2IDcuMTg4LDMwLjAxNTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzNCwxNS4yMzQgOS40ODQsMCAxMS4zNTksLTExLjc4MSAxMS4zNTksLTEyLjkzNyAwLC0wLjE0MSAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NyBsIC03LjA0NywtMjguMTU2MiB6IG0gOS4yMDQsMzYuNzgxMiBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0NCA4LjMyOCwtMjIuNTYyNSAxOC4wOTQsLTIyLjU2MjUgNy45MDYsMCAxNC42NTYsNi4xNzE5IDE4LjY3MiwxMC45MjE5IDEuNDM3LC04LjQ4NDQgOC4xODcsLTEwLjkyMTkgMTIuNSwtMTAuOTIxOSA0LjMxMiwwIDcuNzY1LDIuNTkzOCAxMC4zNDMsNy43NjU2IDIuMjk3LDQuODc1IDQuMzEzLDEzLjY0MDcgNC4zMTMsMTQuMjE4OCAwLDAuNzE4NyAtMC41NzgsMS4yODEyIC0xLjQzOCwxLjI4MTIgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMzEgLTIuMDE1LC0yLjg1OTMgLTIuMTQxLC04LjQ4NDQgLTQuODc1LC0xNy41MzEzIC0xMC43NjYsLTE3LjUzMTMgLTQuMTcyLDAgLTQuNDUzLDMuNzM0NCAtNC40NTMsNi42MDk0IDAsMy4yOTY5IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NDQgMS4wMTUsMy41OTM3IDEuNzM0LDYuNzUgMi44NzUsMTAuOTIxNyA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgwNi42MDksNTguNjU2MyAxMC41MzIsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NjgsMTkuMDc4MSAyMS40NjgsMjkuMDE1NiAwLDExLjMyODQgLTguOTUzLDE5LjI2NTQgLTIxLjA2MiwxOS4yNjU0IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NDEgMCwtNS41NjI1IDQuOTY5LC01LjU2MjUgNS4yNjUsLTUuNTYyNSAxLjY4OCwwIDUuMTU3LDEuMjAzMSA1LjE1Nyw1LjI2NTYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDcgMTMuMzEzLC0xNi4xODc0IDAsLTcuOTUzMSAtNC45NjksLTE1Ljc5NjggLTEwLjQzOCwtMjEuOTUzMSBMIDgwMC4wNjMsNTQuNjcxOSBDIDc5OC45NjksNTMuNTc4MSA3OTguOTY5LDUzLjM5MDYgNzk4Ljk2OSw1MSBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MTMgLTIuNDg0LDAgYyAtMC41LC0yLjk4NDQgLTEuMjAzLC03LjM0MzggLTIuMTg3LC04Ljg0MzggLTAuNzA0LC0wLjc4MTIgLTcuMjUsLTAuNzgxMiAtOS40MzgsLTAuNzgxMiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg1Ni42MDksNTguNjU2MyAxMC41MzIsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NjgsMTkuMDc4MSAyMS40NjgsMjkuMDE1NiAwLDExLjMyODQgLTguOTUzLDE5LjI2NTQgLTIxLjA2MiwxOS4yNjU0IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NDEgMCwtNS41NjI1IDQuOTY5LC01LjU2MjUgNS4yNjUsLTUuNTYyNSAxLjY4OCwwIDUuMTU3LDEuMjAzMSA1LjE1Nyw1LjI2NTYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDcgMTMuMzEzLC0xNi4xODc0IDAsLTcuOTUzMSAtNC45NjksLTE1Ljc5NjggLTEwLjQzOCwtMjEuOTUzMSBMIDg1MC4wNjMsNTQuNjcxOSBDIDg0OC45NjksNTMuNTc4MSA4NDguOTY5LDUzLjM5MDYgODQ4Ljk2OSw1MSBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MTMgLTIuNDg0LDAgYyAtMC41LC0yLjk4NDQgLTEuMjAzLC03LjM0MzggLTIuMTg3LC04Ljg0MzggLTAuNzA0LC0wLjc4MTIgLTcuMjUsLTAuNzgxMiAtOS40MzgsLTAuNzgxMiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDcwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk2NC42NTYsMTI1LjczNCBjIDAsOS4wNDcgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMgLTYuNjA5LC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU3OCwtMy4yOTcgMS40MzgsLTEuMjk2IDUuMTcyLC01LjE3MSA1LjE3MiwtMTIuNjU2IDAsLTYuMDMxIC04LjYyNSwtMzkuNjQwNSAtMjUuODU5LC0zOS42NDA1IC04Ljc2NiwwIC0xMC40ODUsNy4zMjgxIC0xMC40ODUsMTIuNjQwNiAwLDcuMTg3NSAzLjI5NywxNy4yMzQ5IDcuMTg4LDI3LjU3NzkgMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkwNiAtNi45MDYsLTIyLjg0MzcgLTYuOTA2LC0yNi4yODEyIDAsLTMuMTcxOSAwLjQzOCwtOS4wNDY5IDQuODkxLC0xMy4wNzgyIDUuMTcyLC00LjQ1MzEgMTIuMzU5LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA0Nyw0Ni45ODQ1IDMyLjA0Nyw1NS4xNzE1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTk3LjEyNSwxNzEuMTg4IGMgMC41LDEuMTg3IDAuOTA2LDIuMDc4IDAuOTA2LDMuMDc4IDAsMi44NzUgLTIuNTkzLDUuMjY1IC01LjY3Miw1LjI2NSAtMi43ODEsMCAtNC41NjIsLTEuODkgLTUuMjY1LC00LjQ2OCBsIC0xMS44MTMsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQwNiwtMS4yOTcgLTAuNDA2LC0xLjM5IDAsLTEuMDk0IDIuNTk0LC0xLjc5NyAzLjM5MSwtMS43OTcgMC41OTMsMCAwLjY4NywwLjI5NyAxLjI4MSwxLjU5NCBsIDE3LjU3OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDE2LjI4LDczLjg0MzggYyAwLjM5LDEuMzkwNiAwLjM5LDEuNTkzNyAwLjM5LDIuMjgxMiAwLDEuNzk2OSAtMS4zOSwyLjY4NzUgLTIuODcsMi42ODc1IC0xLDAgLTIuNTgsLTAuNTkzNyAtMy40OSwtMi4wNzgxIC0wLjE4LC0wLjUgLTAuOTgsLTMuNTc4MSAtMS4zOSwtNS4zNzUgLTAuNjksLTIuNTc4MSAtMS4zOSwtNS4yNjU2IC0xLjk4LC03LjkzNzUgbCAtNC40NywtMTcuODkwNiBjIC0wLjM5LC0xLjQ4NDQgLTQuNjczLC04LjQzNzUgLTExLjIyLC04LjQzNzUgLTUuMDc4LDAgLTYuMTU2LDQuMzc1IC02LjE1Niw4LjA0NjggMCw0LjU2MjUgMS42ODcsMTAuNzM0NCA1LjA2MiwxOS40Njg4IDEuNTc4LDQuMDc4MSAxLjk4NSw1LjE3MTkgMS45ODUsNy4xNTYyIDAsNC40Njg4IC0zLjE4OCw4LjE0MDcgLTguMTQxLDguMTQwNyAtOS40MzcsMCAtMTMuMTI1LC0xNC40MDYzIC0xMy4xMjUsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMjAzLC0xIDAuOTg1LDAgMS4wOTQsMC4yMDMxIDEuNTc4LDEuNzk2OSAyLjY4OCw5LjMyODEgNi42NTcsMTIuMzEyNSAxMC4wMzIsMTIuMzEyNSAwLjc5NiwwIDIuNDg0LDAgMi40ODQsLTMuMTcxOSAwLC0yLjQ4NDQgLTAuOTg0LC01LjA2MjUgLTEuNjg4LC02Ljk1MzEgLTMuOTY4LC0xMC41MzEzIC01Ljc1LC0xNi4yMDMyIC01Ljc1LC0yMC44NTk0IDAsLTguODQzOCA2LjI1LC0xMS44MjgxIDEyLjExLC0xMS44MjgxIDMuODc1LDAgNy4yNSwxLjY4NzUgMTAuMDM2LDQuNDY4NyAtMS4yODYsLTUuMTU2MiAtMi40ODksLTEwLjAzMTIgLTYuNDU4LC0xNS4yOTY5IC0yLjU3OCwtMy4zNzUgLTYuMzU5LC02LjI1IC0xMC45MjIsLTYuMjUgLTEuMzkxLDAgLTUuODU5LDAuMjk2OSAtNy41NDcsNC4xNzE5IDEuNTc4LDAgMi44NzUsMCA0LjI2NiwxLjE4NzUgMSwwLjg5MDYgMS45ODQsMi4xODc1IDEuOTg0LDQuMDc4MSAwLDMuMDc4MiAtMi42ODcsMy40Njg4IC0zLjY3MiwzLjQ2ODggLTIuMjgxLDAgLTUuNTYyLC0xLjU5MzggLTUuNTYyLC02LjQ1MzEgMCwtNC45Njg4IDQuMzc1LC04LjY0MDcgMTAuNTMxLC04LjY0MDcgMTAuMjM0LDAgMjAuNDUsOS4wMzEzIDIzLjIzLDIwLjI2NTcgbCA5LjU1LDM3LjkzNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjIwLjk3LDExOC41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxODkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzgyIDAsMi43MzQzIC0yLjQzLDIuNzM0MyAtNC41OSwyLjczNDMgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTM3IDAsLTIuNzE4OCAyLjQ1LC0yLjcxODggNC42MSwtMi43MTg4IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0MDAuNjYsMTI1LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMSAtOC42MywtMzkuNjQwNSAtMjUuODYsLTM5LjY0MDUgLTguNzcsMCAtMTAuNDksNy4zMjgxIC0xMC40OSwxMi42NDA2IDAsNy4xODc1IDMuMywxNy4yMzQ5IDcuMTksMjcuNTc3OSAyLjMsNS44OTEgMi44OCw3LjMyOCAyLjg4LDEwLjIwMyAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMzQ0IDkuMDUsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTA2IC02LjksLTIyLjg0MzcgLTYuOSwtMjYuMjgxMiAwLC0zLjE3MTkgMC40NCwtOS4wNDY5IDQuODksLTEzLjA3ODIgNS4xNywtNC40NTMxIDEyLjM2LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA1LDQ2Ljk4NDUgMzIuMDUsNTUuMTcxNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0NTEuMjgsODguODQzOCBjIDAuMzksMS4zOTA2IDAuMzksMS41OTM3IDAuMzksMi4yODEyIDAsMS43OTY5IC0xLjM5LDIuNjg3NSAtMi44NywyLjY4NzUgLTEsMCAtMi41OCwtMC41OTM3IC0zLjQ5LC0yLjA3ODEgLTAuMTgsLTAuNSAtMC45OCwtMy41NzgxIC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzgxIC0xLjM5LC01LjI2NTYgLTEuOTgsLTcuOTM3NSBsIC00LjQ3LC0xNy44OTA2IGMgLTAuMzksLTEuNDg0NCAtNC42NywtOC40Mzc1IC0xMS4yMiwtOC40Mzc1IC01LjA4LDAgLTYuMTYsNC4zNzUgLTYuMTYsOC4wNDY4IDAsNC41NjI1IDEuNjksMTAuNzM0NCA1LjA3LDE5LjQ2ODggMS41Nyw0LjA3ODEgMS45OCw1LjE3MTkgMS45OCw3LjE1NjIgMCw0LjQ2ODggLTMuMTksOC4xNDA3IC04LjE0LDguMTQwNyAtOS40NCwwIC0xMy4xMiwtMTQuNDA2MyAtMTMuMTIsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwMzEgMS41OCwxLjc5NjkgMi42OCw5LjMyODEgNi42NSwxMi4zMTI1IDEwLjAzLDEyLjMxMjUgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MTkgMCwtMi40ODQ0IC0wLjk4LC01LjA2MjUgLTEuNjksLTYuOTUzMSAtMy45NiwtMTAuNTMxMyAtNS43NSwtMTYuMjAzMiAtNS43NSwtMjAuODU5NCAwLC04Ljg0MzggNi4yNSwtMTEuODI4MSAxMi4xMSwtMTEuODI4MSAzLjg4LDAgNy4yNSwxLjY4NzUgMTAuMDQsNC40Njg3IC0xLjI5LC01LjE1NjIgLTIuNDksLTEwLjAzMTIgLTYuNDYsLTE1LjI5NjkgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI1IC0xMC45MiwtNi4yNSAtMS4zOSwwIC01Ljg2LDAuMjk2OSAtNy41NSw0LjE3MTkgMS41OCwwIDIuODgsMCA0LjI3LDEuMTg3NSAxLDAuODkwNiAxLjk4LDIuMTg3NSAxLjk4LDQuMDc4MSAwLDMuMDc4MiAtMi42OCwzLjQ2ODggLTMuNjcsMy40Njg4IC0yLjI4LDAgLTUuNTYsLTEuNTkzOCAtNS41NiwtNi40NTMxIDAsLTQuOTY4OCA0LjM3LC04LjY0MDcgMTAuNTMsLTguNjQwNyAxMC4yMywwIDIwLjQ1LDkuMDMxMyAyMy4yMywyMC4yNjU3IGwgOS41NSwzNy45Mzc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ4Ny40NCw3OC44OTA2IGMgMCw0LjE3MTkgLTMuNDYsNy4wNDY5IC02LjkxLDcuMDQ2OSAtNC4xNSwwIC03LjAzLC0zLjQ1MzEgLTcuMDMsLTYuODkwNiAwLC00LjE3MTkgMy40NSwtNy4wNDY5IDYuODksLTcuMDQ2OSA0LjE3LDAgNy4wNSwzLjQ1MzEgNy4wNSw2Ljg5MDYiIC8+PC9nPjwvZz48L3N2Zz4=)
![\begin{array}{lccccc}\vec{v}&=&v_x\vec{i}+v_y\vec{j}=&&\\[2mm]
&=&v_x(b_{11}\vec{i'}+b_{12}\vec{j'})&+&v_y(b_{21}\vec{i'}+b_{22}\vec{j'})&=\\[2mm]
&=&(b_{11}v_x+b_{21}v_y)\vec{i'}&+&(b_{12}v_x+b_{22}v_y)\vec{j'}&=\\[2mm]
&&&=&v'_x\vec{i'}+v'_y\vec{j'},&\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDI4MCA5NCIKICAgaGVpZ2h0PSI5NCIKICAgd2lkdGg9IjI4MCIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDk0KSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjYuODU5NCw4ODMuNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40Mzc1LDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYyLDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDYxLjY1NjMsODUxLjczNCBjIDAsOS4wNDcgLTQuNjA5NCw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMyLDAgLTYuNjA5NCwtMy40NTMgLTYuNjA5NCwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgxLC0zLjI5NyAxLjQzNzUsLTEuMjk2IDUuMTcxOSwtNS4xNzEgNS4xNzE5LC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5NCwtMzkuNjQgLTguNzY1NiwwIC0xMC40ODQ0LDcuMzI4IC0xMC40ODQ0LDEyLjY0IDAsNy4xODggMy4yOTY5LDE3LjIzNSA3LjE4NzUsMjcuNTc4IDIuMjk2OSw1Ljg5MSAyLjg3NSw3LjMyOCAyLjg3NSwxMC4yMDMgMCw2LjAzMiAtNC4zMTI1LDExLjUgLTExLjM1OTMsMTEuNSAtMTMuMjE4OCwwIC0xOC41MzEzLC0yMC44NDMgLTE4LjUzMTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3ODEyNSwtMS4yOTcgMS41NzgxMywtMS4yOTcgMS4yOTY4NywwIDEuNDM3NSwwLjU3OCAyLjAxNTYyLDIuNTk0IDMuNDUzMTMsMTIuMzQ0IDkuMDQ2ODUsMTcuODEyIDE0LjUxNTY1LDE3LjgxMiAxLjI4MTIsMCAzLjczNDQsMCAzLjczNDQsLTQuNzUgMCwtMy43MzQgLTEuNTc4MiwtNy44OSAtMy43MzQ0LC0xMy4zNTkgLTYuOTA2MywtMTguMzkxIC02LjkwNjMsLTIyLjg0NCAtNi45MDYzLC0yNi4yODEgMCwtMy4xNzIgMC40Mzc1LC05LjA0NyA0Ljg5MDcsLTEzLjA3OCA1LjE3MTgsLTQuNDUzIDEyLjM1OTMsLTQuNDUzIDEzLjY0MDYsLTQuNDUzIDIzLjg1OTQsMCAzMi4wNDY5LDQ2Ljk4NCAzMi4wNDY5LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI2NS45NjksODQ0LjU0NyBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM1IC0yLjQzOCwyLjczNSAtNC41OTQsMi43MzUgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41OTQgMCwtMi43MTkgMi40NTMsLTIuNzE5IDQuNjA5LC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NzAuNjU2LDg1MS43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDYwNy4xNzIsODA2IGMgMC42MDksMi41NzggMi44OTEsMTEuNzE5IDkuODQ0LDExLjcxOSAwLjUsMCAyLjg3NSwwIDQuOTY4LC0xLjI4MSAtMi43ODEsLTAuNSAtNC43NjUsLTIuOTg1IC00Ljc2NSwtNS4zNzUgMCwtMS41NzkgMS4wNzgsLTMuNDY5IDMuNzY1LC0zLjQ2OSAyLjE4OCwwIDUuMzYsMS43ODEgNS4zNiw1Ljc1IDAsNS4xNzIgLTUuODYsNi41NjIgLTkuMjM1LDYuNTYyIC01Ljc2NSwwIC05LjIzNCwtNS4yNjUgLTEwLjQyMSwtNy41NDcgLTIuNDg1LDYuNTQ3IC03Ljg2LDcuNTQ3IC0xMC43MzUsNy41NDcgLTEwLjMyOCwwIC0xNiwtMTIuODEyIC0xNiwtMTUuMjk3IDAsLTEgMSwtMSAxLjIwMywtMSAwLjc5NywwIDEuMDk0LDAuMjA0IDEuMjgyLDEuMDk0IDMuMzksMTAuNTMxIDkuOTM3LDEzLjAxNiAxMy4zMTIsMTMuMDE2IDEuODkxLDAgNS4zNzUsLTAuODkxIDUuMzc1LC02LjY1NiAwLC0zLjA3OSAtMS42ODcsLTkuNzM1IC01LjM3NSwtMjMuNjQxIC0xLjU3OCwtNi4xNTYgLTUuMDYyLC0xMC4zMjggLTkuNDM3LC0xMC4zMjggLTAuNTk0LDAgLTIuODc1LDAgLTQuOTY5LDEuMjk3IDIuNDg0LDAuNDg0IDQuNjcyLDIuNTc4IDQuNjcyLDUuMzU5IDAsMi42ODggLTIuMTg4LDMuNDY5IC0zLjY3MiwzLjQ2OSAtMi45ODUsMCAtNS40NjksLTIuNTc4IC01LjQ2OSwtNS43NSAwLC00LjU3OCA0Ljk2OSwtNi41NjMgOS4zNDQsLTYuNTYzIDYuNTYyLDAgMTAuMTI1LDYuOTUzIDEwLjQzNyw3LjU0NyAxLjE4OCwtMy42NzIgNC43NjYsLTcuNTQ3IDEwLjcxOSwtNy41NDcgMTAuMjM0LDAgMTUuODkxLDEyLjgxMyAxNS44OTEsMTUuMjk3IDAsMSAtMC44OTEsMSAtMS4xODgsMSAtMC44OSwwIC0xLjA5NCwtMC40MDYgLTEuMjk3LC0xLjA5NCAtMy4yNjUsLTEwLjYyNSAtMTAuMDMxLC0xMy4wMTUgLTEzLjIwMywtMTMuMDE1IC0zLjg3NSwwIC01LjQ2OSwzLjE3MiAtNS40NjksNi41NjIgMCwyLjE3MiAwLjU5NCw0LjM2IDEuNjg4LDguNzM1IEwgNjA3LjE3Miw4MDYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2ODkuODU5LDkxNC43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDI2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY3NS42NTYsODE4LjU0NyBjIDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzNywxLjI4MSAtMS4yOTcsMCAtMS40MzgsLTAuNDIyIC0yLjE1NiwtMi44NTkgLTMuNzM1LC0xMy4wNzggLTkuNjI1LC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzM0LDAgLTMuNzM0LDAuNDM3IC0zLjczNCw0LjczNCAwLDMuODkxIDEuNzE5LDguMTg3IDMuMjk3LDEyLjUgbCAxMC4wNjIsMjYuNzE5IGMgMC40MjIsMS4xNTYgMS40MzgsMy43MzQgMS40MzgsNi40NjggMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMDYyIDguOTA2LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsLTAuMTU2IDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjg3NSwtOC40NjggLTMuMDE2LC0xMS42MjUgbCAtMTAuMDYyLC0yNi43MzQgYyAtMC44NiwtMi4yOTcgLTEuNzE5LC00LjU5NCAtMS43MTksLTcuMTcyIDAsLTYuNDY5IDQuNDUzLC0xMS42NCAxMS4zNDQsLTExLjY0IDEzLjIxOCwwIDE4LjM5LDIwLjk2OCAxOC4zOSwyMS45ODQgeiBtIC0xLjE1Niw2OS4wOTQgYyAwLDIuMTU2IC0xLjcxOSw0LjczNCAtNC44NzUsNC43MzQgLTMuMzEyLDAgLTcuMDQ3LC0zLjE1NiAtNy4wNDcsLTYuODkxIDAsLTMuNTkzIDMuMDE2LC00LjczNCA0Ljc1LC00LjczNCAzLjg3NSwwIDcuMTcyLDMuNzM0IDcuMTcyLDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzcyLjMxMyw4MzEuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTIxLjY1Niw4NTEuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5NzIuMjgxLDgxMy44NDQgYyAwLjM5MSwxLjM5IDAuMzkxLDEuNTk0IDAuMzkxLDIuMjgxIDAsMS43OTcgLTEuMzkxLDIuNjg4IC0yLjg3NSwyLjY4OCAtMSwwIC0yLjU3OCwtMC41OTQgLTMuNDg0LC0yLjA3OSAtMC4xODgsLTAuNSAtMC45ODUsLTMuNTc4IC0xLjM5MSwtNS4zNzUgLTAuNjg4LC0yLjU3OCAtMS4zOTEsLTUuMjY1IC0xLjk4NCwtNy45MzcgbCAtNC40NjksLTE3Ljg5MSBjIC0wLjM5MSwtMS40ODQgLTQuNjcyLC04LjQzNyAtMTEuMjE5LC04LjQzNyAtNS4wNzgsMCAtNi4xNTYsNC4zNzUgLTYuMTU2LDguMDQ3IDAsNC41NjIgMS42ODcsMTAuNzM0IDUuMDYyLDE5LjQ2OCAxLjU3OCw0LjA3OSAxLjk4NSw1LjE3MiAxLjk4NSw3LjE1NyAwLDQuNDY4IC0zLjE4OCw4LjE0IC04LjE0MSw4LjE0IC05LjQzNywwIC0xMy4xMjUsLTE0LjQwNiAtMTMuMTI1LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjAzLC0xIDAuOTg1LDAgMS4wOTQsMC4yMDQgMS41NzgsMS43OTcgMi42ODgsOS4zMjggNi42NTcsMTIuMzEzIDEwLjAzMiwxMi4zMTMgMC43OTYsMCAyLjQ4NCwwIDIuNDg0LC0zLjE3MiAwLC0yLjQ4NCAtMC45ODQsLTUuMDYzIC0xLjY4OCwtNi45NTMgLTMuOTY4LC0xMC41MzEgLTUuNzUsLTE2LjIwMyAtNS43NSwtMjAuODYgMCwtOC44NDMgNi4yNSwtMTEuODI4IDEyLjExLC0xMS44MjggMy44NzUsMCA3LjI1LDEuNjg4IDEwLjAzMSw0LjQ2OSAtMS4yODEsLTUuMTU2IC0yLjQ4NCwtMTAuMDMxIC02LjQ1MywtMTUuMjk3IC0yLjU3OCwtMy4zNzUgLTYuMzU5LC02LjI1IC0xMC45MjIsLTYuMjUgLTEuMzkxLDAgLTUuODU5LDAuMjk3IC03LjU0Nyw0LjE3MiAxLjU3OCwwIDIuODc1LDAgNC4yNjYsMS4xODggMSwwLjg5IDEuOTg0LDIuMTg3IDEuOTg0LDQuMDc4IDAsMy4wNzggLTIuNjg3LDMuNDY4IC0zLjY3MiwzLjQ2OCAtMi4yODEsMCAtNS41NjIsLTEuNTkzIC01LjU2MiwtNi40NTMgMCwtNC45NjggNC4zNzUsLTguNjQgMTAuNTMxLC04LjY0IDEwLjIzNCwwIDIwLjQ1Myw5LjAzMSAyMy4yMzQsMjAuMjY1IGwgOS41NDcsMzcuOTM4IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTA0NC44Niw5MTQuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNjksMCBjIC0yLjQ1MywwIC00Ljg5MSwwIC00Ljg5MSwtMi43MzQgMCwtMi41NzggMi41OTQsLTIuNTc4IDQuODkxLC0yLjU3OCBsIDQ1Ljk2OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAzMi4yOCw4NDMuNTQ3IGMgMC41OCwyLjI5NyAwLjU4LDQuMjk3IDAuNTgsNC44NzUgMCw4LjMyOCAtNi4xOSwxMi45MzcgLTEyLjY0LDEyLjkzNyAtMTQuNTIsMCAtMjIuMjY3LC0yMC45ODQgLTIyLjI2NywtMjEuOTg0IDAsLTAuNzE5IDAuNTYzLC0xLjI5NyAxLjQyMiwtMS4yOTcgMS4xNTUsMCAxLjI5NSwwLjU3OCAyLjAxNSwyLjAxNiA1Ljc1LDEzLjkzNyAxMi45NCwxOC4zOSAxOC4zOSwxOC4zOSAzLjAyLDAgNC42LC0xLjU3OCA0LjYsLTYuNjA5IDAsLTMuNDUzIC0wLjQzLC00Ljg5MSAtMSwtNy40NjkgbCAtMTMuNjYsLTU0LjE1NiBjIC0yLjcyLC0xMC42NDEgLTkuNDcsLTE4LjY4NyAtMTcuMzc2LC0xOC42ODcgLTAuNTc4LDAgLTMuNTk0LDAgLTYuMzI4LDEuNDM3IDMuNDUzLDAuNzE5IDYuMTg3LDMuNDUzIDYuMTg3LDYuOTA2IDAsMi4yOTcgLTEuNzM0LDQuNTk0IC00Ljg5LDQuNTk0IC0zLjczNSwwIC03LjE4OCwtMy4xNzIgLTcuMTg4LC03LjQ2OSAwLC01Ljg5IDYuMzI4LC04LjM0MyAxMi4yMTksLTguMzQzIDkuOTA2LDAgMjIuOTg2LDcuMzI4IDI2LjU3NiwyMS43MDMgbCAxMy4zNiw1My4xNTYgeiBtIDUuODksNDQuMDk0IGMgMCwzLjU5MyAtMy4wMSw0LjczNCAtNC43NSw0LjczNCAtMy44NywwIC03LjE3LC0zLjczNCAtNy4xNywtNi44OTEgMCwtMi4xNTYgMS43MiwtNC43MzQgNC44OCwtNC43MzQgMy4zMSwwIDcuMDQsMy4xNTYgNy4wNCw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExODMuOTcsODQ0LjU0NyBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzUgLTIuNDMsMi43MzUgLTQuNTksMi43MzUgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTQgMCwtMi43MTkgMi40NSwtMi43MTkgNC42MSwtMi43MTkgbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjY1Ljk2OSw1OTkuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ1Ni42NTYsNjA2LjczNCBjIDAsOS4wNDcgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMgLTYuNjA5LC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU3OCwtMy4yOTcgMS40MzgsLTEuMjk2IDUuMTcyLC01LjE3MSA1LjE3MiwtMTIuNjU2IDAsLTYuMDMxIC04LjYyNSwtMzkuNjQgLTI1Ljg1OSwtMzkuNjQgLTguNzY2LDAgLTEwLjQ4NSw3LjMyOCAtMTAuNDg1LDEyLjY0IDAsNy4xODggMy4yOTcsMTcuMjM1IDcuMTg4LDI3LjU3OCAyLjI5Nyw1Ljg5MSAyLjg3NSw3LjMyOCAyLjg3NSwxMC4yMDMgMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMzQ0IDkuMDQ3LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsMCAzLjczNSwtNC43NSAwLC0zLjczNCAtMS41NzgsLTcuODkgLTMuNzM1LC0xMy4zNTkgLTYuOTA2LC0xOC4zOTEgLTYuOTA2LC0yMi44NDQgLTYuOTA2LC0yNi4yODEgMCwtMy4xNzIgMC40MzgsLTkuMDQ3IDQuODkxLC0xMy4wNzggNS4xNzIsLTQuNDUzIDEyLjM1OSwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDQ3LDQ2Ljk4NCAzMi4wNDcsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDkzLjE3Miw1NjEgYyAwLjYwOSwyLjU3OCAyLjg5MSwxMS43MTkgOS44NDQsMTEuNzE5IDAuNSwwIDIuODc1LDAgNC45NjgsLTEuMjgxIC0yLjc4MSwtMC41IC00Ljc2NSwtMi45ODUgLTQuNzY1LC01LjM3NSAwLC0xLjU3OSAxLjA3OCwtMy40NjkgMy43NjUsLTMuNDY5IDIuMTg4LDAgNS4zNiwxLjc4MSA1LjM2LDUuNzUgMCw1LjE3MiAtNS44Niw2LjU2MiAtOS4yMzUsNi41NjIgLTUuNzY1LDAgLTkuMjM0LC01LjI2NSAtMTAuNDIxLC03LjU0NyAtMi40ODUsNi41NDcgLTcuODYsNy41NDcgLTEwLjczNSw3LjU0NyAtMTAuMzI4LDAgLTE2LC0xMi44MTIgLTE2LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjAzLC0xIDAuNzk3LDAgMS4wOTQsMC4yMDQgMS4yODIsMS4wOTQgMy4zOSwxMC41MzEgOS45MzcsMTMuMDE2IDEzLjMxMiwxMy4wMTYgMS44OTEsMCA1LjM3NSwtMC44OTEgNS4zNzUsLTYuNjU2IDAsLTMuMDc5IC0xLjY4NywtOS43MzUgLTUuMzc1LC0yMy42NDEgLTEuNTc4LC02LjE1NiAtNS4wNjIsLTEwLjMyOCAtOS40MzcsLTEwLjMyOCAtMC41OTQsMCAtMi44NzUsMCAtNC45NjksMS4yOTcgMi40ODQsMC40ODQgNC42NzIsMi41NzggNC42NzIsNS4zNTkgMCwyLjY4OCAtMi4xODgsMy40NjkgLTMuNjcyLDMuNDY5IC0yLjk4NSwwIC01LjQ2OSwtMi41NzggLTUuNDY5LC01Ljc1IDAsLTQuNTc4IDQuOTY5LC02LjU2MyA5LjM0NCwtNi41NjMgNi41NjIsMCAxMC4xMjUsNi45NTMgMTAuNDM3LDcuNTQ3IDEuMTg4LC0zLjY3MiA0Ljc2NiwtNy41NDcgMTAuNzE5LC03LjU0NyAxMC4yMzQsMCAxNS44OTEsMTIuODEzIDE1Ljg5MSwxNS4yOTcgMCwxIC0wLjg5MSwxIC0xLjE4OCwxIC0wLjg5LDAgLTEuMDk0LC0wLjQwNiAtMS4yOTcsLTEuMDk0IC0zLjI2NSwtMTAuNjI1IC0xMC4wMzEsLTEzLjAxNSAtMTMuMjAzLC0xMy4wMTUgLTMuODc1LDAgLTUuNDY5LDMuMTcyIC01LjQ2OSw2LjU2MiAwLDIuMTcyIDAuNTk0LDQuMzYgMS42ODgsOC43MzUgTCA0OTMuMTcyLDU2MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU2Ny42ODgsNTE4LjA5NCBjIDAsMC40MjIgMCwwLjcxOSAtMi40MzgsMy4xNTYgLTE0LjM3NSwxNC41MTYgLTIyLjQyMiwzOC4yMTkgLTIyLjQyMiw2Ny41MTYgMCwyNy44NzUgNi43NjYsNTEuODU5IDIzLjQyMiw2OC44MTIgMS40MzgsMS4yOTcgMS40MzgsMS41NzggMS40MzgsMi4wMTYgMCwwLjg1OSAtMC43MTksMS4xNTYgLTEuMjk3LDEuMTU2IC0xLjg2LDAgLTEzLjY0MSwtMTAuMzQ0IC0yMC42ODgsLTI0LjQyMiAtNy4zMjgsLTE0LjUxNSAtMTAuNjI1LC0yOS44OSAtMTAuNjI1LC00Ny41NjIgMCwtMTIuNzgyIDIuMDE2LC0yOS44NzUgOS40ODUsLTQ1LjI1IDguNDY4LC0xNy4yMzUgMjAuMjUsLTI2LjU3OCAyMS44MjgsLTI2LjU3OCAwLjU3OCwwIDEuMjk3LDAuMjk2IDEuMjk3LDEuMTU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjA5LjE4OCw2NDkuMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NSAtOS42MjUsLTM4LjM1OSAtMTAuMTg3LC00MC45MzggLTAuNzE5LC0zLjU5MyAtMC43MTksLTYuMDMxIC0wLjcxOSwtNy45MDYgMCwtMTQuNjU2IDguMTg3LC0yMi4yNjUgMTcuNTE1LC0yMi4yNjUgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNiAzMy45MDcsNDIuMjM0IDAsMTMuMjE5IC03LjQ2OSwyMi41NjIgLTE4LjIzNSwyMi41NjIgLTcuNDg0LDAgLTE0LjIzNCwtNi4xODcgLTE2Ljk1MywtOS4wNjIgbCAxMC40ODUsNDEuODEyIHogbSAtOS4wNDcsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzIC05LjYyNSwxNC42NTYgMCw0LjczNCAwLjQyMiw3LjQ2OSAzLjAxNSwxNy41MTUgMC40MjIsMS44NzUgMi43MTksMTEuMDYzIDMuMjk3LDEyLjkzOCAwLjI5NywxLjE0MSA4Ljc2NiwxMy45MzcgMTguNTMxLDEzLjkzNyA2LjMyOSwwIDkuMjA0LC02LjMyOCA5LjIwNCwtMTMuNzk2IDAsLTYuODkxIC00LjAzMiwtMjMuMTI1IC03LjYyNSwtMzAuNTk0IC0zLjU5NCwtNy43NjYgLTEwLjE4OCwtMTQuNjU2IC0xNi43OTcsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY2NS4yMDMsNTk0LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDcxNS4yMDMsNTk0LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgxMC44NTksNjczLjc2NiBjIC0xLjczNCwtMS41NzggLTcuMDQ2LC02LjYxIC03LjA0NiwtOC42MjUgMCwtMS40MzggMS4yOTYsLTIuNzE5IDIuNzM0LC0yLjcxOSAxLjI5NywwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzLDQuMjk3IDcuMzI4LDcuMDMxIDEwLjYyNSw4LjkwNiAxLjQzNywwLjg1OSAyLjQ1MywxLjI4MSAyLjQ1MywyLjg3NSAwLDEuMjgxIC0xLjE1NiwyIC0yLjAxNiwyLjcxOSAtNC4wMzEsMi43MzQgLTUuMDMxLDYuNjA5IC01LjQ2OCw4LjMyOCAtMC40MjIsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODc1LDAgLTIuNTkzLC0wLjU2MyAtMi41OTMsLTIuNzE5IDAsLTEuMjk3IDAuODU5LC00Ljc1IDMuNTkzLC04LjYyNSBsIC00OC4yNjUsMCBjIC0yLjQ1MywwIC00Ljg5MSwwIC00Ljg5MSwtMi43MzQgMCwtMi41NzggMi41OTQsLTIuNTc4IDQuODkxLC0yLjU3OCBsIDQ1Ljk2OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzgwLjY1Niw1NzMuNTQ3IGMgMCwwLjcxOSAtMC41NzgsMS4yODEgLTEuNDM3LDEuMjgxIC0xLjI5NywwIC0xLjQzOCwtMC40MjIgLTIuMTU2LC0yLjg1OSAtMy43MzUsLTEzLjA3OCAtOS42MjUsLTE3LjUzMSAtMTQuMzYsLTE3LjUzMSAtMS43MzQsMCAtMy43MzQsMC40MzcgLTMuNzM0LDQuNzM0IDAsMy44OTEgMS43MTksOC4xODcgMy4yOTcsMTIuNSBsIDEwLjA2MiwyNi43MTkgYyAwLjQyMiwxLjE1NiAxLjQzOCwzLjczNCAxLjQzOCw2LjQ2OCAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4wNjIgOC45MDYsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwtMC4xNTYgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuODc1LC04LjQ2OCAtMy4wMTYsLTExLjYyNSBsIC0xMC4wNjIsLTI2LjczNCBjIC0wLjg2LC0yLjI5NyAtMS43MTksLTQuNTk0IC0xLjcxOSwtNy4xNzIgMCwtNi40NjkgNC40NTMsLTExLjY0IDExLjM0NCwtMTEuNjQgMTMuMjE4LDAgMTguMzksMjAuOTY4IDE4LjM5LDIxLjk4NCB6IG0gLTEuMTU2LDY5LjA5NCBjIDAsMi4xNTYgLTEuNzE5LDQuNzM0IC00Ljg3NSw0LjczNCAtMy4zMTIsMCAtNy4wNDcsLTMuMTU2IC03LjA0NywtNi44OTEgMCwtMy41OTMgMy4wMTYsLTQuNzM0IDQuNzUsLTQuNzM0IDMuODc1LDAgNy4xNzIsMy43MzQgNy4xNzIsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MTMuMTI1LDY0MS4xODggYyAwLjUsMS4xODcgMC45MDYsMi4wNzggMC45MDYsMy4wNzggMCwyLjg3NSAtMi41OTMsNS4yNjUgLTUuNjcyLDUuMjY1IC0yLjc4MSwwIC00LjU2MiwtMS44OSAtNS4yNjUsLTQuNDY4IGwgLTExLjgxMywtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNDA2LC0xLjI5NyAtMC40MDYsLTEuMzkgMCwtMS4wOTQgMi41OTQsLTEuNzk3IDMuMzkxLC0xLjc5NyAwLjU5MywwIDAuNjg3LDAuMjk3IDEuMjgxLDEuNTk0IGwgMTcuNTc4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDYwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDkwOS4zMTMsNTg2LjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDYyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMjcuMTksNjQ5LjEwOSBjIDAuMTQsMC41NzkgMC40MiwxLjQzOCAwLjQyLDIuMTU3IDAsMS40MzcgLTEuNDQsMS40MzcgLTEuNzIsMS40MzcgLTAuMTQsMCAtNS4zMSwtMC40MzcgLTcuOTEsLTAuNzE5IC0yLjQzLC0wLjE1NiAtNC41OSwtMC40MzcgLTcuMTcsLTAuNTc4IC0zLjQ1LC0wLjI4MSAtNC40NSwtMC40MzcgLTQuNDUsLTMuMDE1IDAsLTEuNDM4IDEuNDQsLTEuNDM4IDIuODcsLTEuNDM4IDcuMzIsMCA3LjMyLC0xLjI5NyA3LjMyLC0yLjczNCAwLC0xIC0xLjE0LC01LjE3MiAtMS43MiwtNy43NSBsIC0zLjQ1LC0xMy43OTcgYyAtMS40MywtNS43NSAtOS42MywtMzguMzU5IC0xMC4xOSwtNDAuOTM4IC0wLjcyLC0zLjU5MyAtMC43MiwtNi4wMzEgLTAuNzIsLTcuOTA2IDAsLTE0LjY1NiA4LjE5LC0yMi4yNjUgMTcuNTEsLTIyLjI2NSAxNi42OCwwIDMzLjkxLDIxLjQwNiAzMy45MSw0Mi4yMzQgMCwxMy4yMTkgLTcuNDcsMjIuNTYyIC0xOC4yMywyMi41NjIgLTcuNDksMCAtMTQuMjQsLTYuMTg3IC0xNi45NiwtOS4wNjIgbCAxMC40OSw0MS44MTIgeiBtIC05LjA1LC05NC42NzEgYyAtNC42MSwwIC05LjYyLDMuNDUzIC05LjYyLDE0LjY1NiAwLDQuNzM0IDAuNDIsNy40NjkgMy4wMSwxNy41MTUgMC40MiwxLjg3NSAyLjcyLDExLjA2MyAzLjMsMTIuOTM4IDAuMywxLjE0MSA4Ljc2LDEzLjkzNyAxOC41MywxMy45MzcgNi4zMywwIDkuMiwtNi4zMjggOS4yLC0xMy43OTYgMCwtNi44OTEgLTQuMDMsLTIzLjEyNSAtNy42MiwtMzAuNTk0IC0zLjYsLTcuNzY2IC0xMC4xOSwtMTQuNjU2IC0xNi44LC0xNC42NTYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMDgzLjIsNTk0LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yOCwyLjU3OCAtNi4xNSwtNi4zNTkgLTE0LjksLTYuMzU5IC0xOC4wOCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTksMCA3Ljg1LDAgMTMuMDIsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4zLC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNywwIDAsLTMuMDc4IGMgMy40NywwLjI5NyAxMi4xMiwwLjI5NyAxNi4wOSwwLjI5NyAzLjk3LDAgMTIuNjEsMCAxNi4xLC0wLjI5NyBsIDAsMy4wNzggLTMuMTksMCBjIC04Ljk0LDAgLTkuMjQsMS4wOTQgLTkuMjQsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExMTYuNjEsNTM4LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjM2Ljg2LDY3My43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDcwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMDguMjgsNTk4LjU0NyBjIDAuNTgsMi4yOTcgMC41OCw0LjI5NyAwLjU4LDQuODc1IDAsOC4zMjggLTYuMTksMTIuOTM3IC0xMi42NCwxMi45MzcgLTE0LjUyLDAgLTIyLjI3LC0yMC45ODQgLTIyLjI3LC0yMS45ODQgMCwtMC43MTkgMC41NywtMS4yOTcgMS40MywtMS4yOTcgMS4xNSwwIDEuMjksMC41NzggMi4wMSwyLjAxNiA1Ljc1LDEzLjkzNyAxMi45NCwxOC4zOSAxOC4zOSwxOC4zOSAzLjAyLDAgNC42LC0xLjU3OCA0LjYsLTYuNjA5IDAsLTMuNDUzIC0wLjQzLC00Ljg5MSAtMSwtNy40NjkgbCAtMTMuNjYsLTU0LjE1NiBjIC0yLjcyLC0xMC42NDEgLTkuNDcsLTE4LjY4NyAtMTcuMzgsLTE4LjY4NyAtMC41NywwIC0zLjU5LDAgLTYuMzIsMS40MzcgMy40NSwwLjcxOSA2LjE4LDMuNDUzIDYuMTgsNi45MDYgMCwyLjI5NyAtMS43Myw0LjU5NCAtNC44OSw0LjU5NCAtMy43MywwIC03LjE4LC0zLjE3MiAtNy4xOCwtNy40NjkgMCwtNS44OSA2LjMyLC04LjM0MyAxMi4yMSwtOC4zNDMgOS45MSwwIDIyLjk5LDcuMzI4IDI2LjU4LDIxLjcwMyBsIDEzLjM2LDUzLjE1NiB6IG0gNS44OSw0NC4wOTQgYyAwLDMuNTkzIC0zLjAxLDQuNzM0IC00Ljc1LDQuNzM0IC0zLjg3LDAgLTcuMTcsLTMuNzM0IC03LjE3LC02Ljg5MSAwLC0yLjE1NiAxLjcyLC00LjczNCA0Ljg4LC00LjczNCAzLjMxLDAgNy4wNCwzLjE1NiA3LjA0LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTI0OS4xMyw2NDEuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNCwtMS4yOTcgLTAuNCwtMS4zOSAwLC0xLjA5NCAyLjU5LC0xLjc5NyAzLjM5LC0xLjc5NyAwLjU5LDAgMC42OCwwLjI5NyAxLjI4LDEuNTk0IGwgMTcuNTgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTI5Ni41Miw1ODguNzY2IGMgMCwxMC45MjIgLTEuNDQsMjguNzM0IC05LjQ5LDQ1LjQwNiAtOC40OCwxNy4yMzQgLTIwLjI1LDI2LjU3OCAtMjEuODQsMjYuNTc4IC0wLjU2LDAgLTEuMjgsLTAuMjk3IC0xLjI4LC0xLjE1NiAwLC0wLjQzOCAwLC0wLjcxOSAyLjQzLC0zLjE1NiAxNC4zNiwtMTQuNTE2IDIyLjQxLC0zOC4yMTkgMjIuNDEsLTY3LjUxNiAwLC0yNy44NzUgLTYuNzUsLTUxLjg3NSAtMjMuNDEsLTY4LjgxMyAtMS40MywtMS4yOTYgLTEuNDMsLTEuNTkzIC0xLjQzLC0yLjAxNSAwLC0wLjg2IDAuNzIsLTEuMTU2IDEuMjgsLTEuMTU2IDEuODcsMCAxMy42NSwxMC4zNDMgMjAuNjksMjQuNDIxIDcuMzIsMTQuNjU3IDEwLjY0LDMwLjE3MiAxMC42NCw0Ny40MDciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNDgxLjMxLDU4Ni4xODggMzkuNjYsMCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgMzkuNjQsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTksLTQuNTkzIDIuNzIsMCAyLjcyLDIuNDM3IDIuNzIsNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE3MjIuNjYsNjA2LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMSAtOC42MywtMzkuNjQgLTI1Ljg2LC0zOS42NCAtOC43NywwIC0xMC40OSw3LjMyOCAtMTAuNDksMTIuNjQgMCw3LjE4OCAzLjMsMTcuMjM1IDcuMTksMjcuNTc4IDIuMyw1Ljg5MSAyLjg4LDcuMzI4IDIuODgsMTAuMjAzIDAsNi4wMzIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MyAtMTguNTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3LC0xLjI5NyAxLjU3LC0xLjI5NyAxLjMsMCAxLjQ0LDAuNTc4IDIuMDIsMi41OTQgMy40NSwxMi4zNDQgOS4wNSwxNy44MTIgMTQuNTEsMTcuODEyIDEuMjksMCAzLjc0LDAgMy43NCwtNC43NSAwLC0zLjczNCAtMS41OCwtNy44OSAtMy43NCwtMTMuMzU5IC02LjksLTE4LjM5MSAtNi45LC0yMi44NDQgLTYuOSwtMjYuMjgxIDAsLTMuMTcyIDAuNDQsLTkuMDQ3IDQuODksLTEzLjA3OCA1LjE3LC00LjQ1MyAxMi4zNiwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDUsNDYuOTg0IDMyLjA1LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE3NzQuMjgsNTY4Ljg0NCBjIDAuMzksMS4zOSAwLjM5LDEuNTk0IDAuMzksMi4yODEgMCwxLjc5NyAtMS4zOSwyLjY4OCAtMi44NywyLjY4OCAtMSwwIC0yLjU4LC0wLjU5NCAtMy40OSwtMi4wNzkgLTAuMTgsLTAuNSAtMC45OCwtMy41NzggLTEuMzksLTUuMzc1IC0wLjY5LC0yLjU3OCAtMS4zOSwtNS4yNjUgLTEuOTgsLTcuOTM3IGwgLTQuNDcsLTE3Ljg5MSBjIC0wLjM5LC0xLjQ4NCAtNC42NywtOC40MzcgLTExLjIyLC04LjQzNyAtNS4wOCwwIC02LjE2LDQuMzc1IC02LjE2LDguMDQ3IDAsNC41NjIgMS42OSwxMC43MzQgNS4wNywxOS40NjggMS41Nyw0LjA3OSAxLjk4LDUuMTcyIDEuOTgsNy4xNTcgMCw0LjQ2OCAtMy4xOSw4LjE0IC04LjE0LDguMTQgLTkuNDQsMCAtMTMuMTIsLTE0LjQwNiAtMTMuMTIsLTE1LjI5NyAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMjA0IDEuNTgsMS43OTcgMi42OCw5LjMyOCA2LjY1LDEyLjMxMyAxMC4wMywxMi4zMTMgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MiAwLC0yLjQ4NCAtMC45OCwtNS4wNjMgLTEuNjksLTYuOTUzIC0zLjk2LC0xMC41MzEgLTUuNzUsLTE2LjIwMyAtNS43NSwtMjAuODYgMCwtOC44NDMgNi4yNSwtMTEuODI4IDEyLjExLC0xMS44MjggMy44OCwwIDcuMjUsMS42ODggMTAuMDQsNC40NjkgLTEuMjksLTUuMTU2IC0yLjQ5LC0xMC4wMzEgLTYuNDYsLTE1LjI5NyAtMi41OCwtMy4zNzUgLTYuMzYsLTYuMjUgLTEwLjkyLC02LjI1IC0xLjM5LDAgLTUuODYsMC4yOTcgLTcuNTUsNC4xNzIgMS41OCwwIDIuODgsMCA0LjI3LDEuMTg4IDEsMC44OSAxLjk4LDIuMTg3IDEuOTgsNC4wNzggMCwzLjA3OCAtMi42OCwzLjQ2OCAtMy42NywzLjQ2OCAtMi4yOCwwIC01LjU2LC0xLjU5MyAtNS41NiwtNi40NTMgMCwtNC45NjggNC4zNywtOC42NCAxMC41MywtOC42NCAxMC4yMywwIDIwLjQ1LDkuMDMxIDIzLjIzLDIwLjI2NSBsIDkuNTUsMzcuOTM4IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTgyOS42OSw1MTguMDk0IGMgMCwwLjQyMiAwLDAuNzE5IC0yLjQ0LDMuMTU2IC0xNC4zNywxNC41MTYgLTIyLjQyLDM4LjIxOSAtMjIuNDIsNjcuNTE2IDAsMjcuODc1IDYuNzYsNTEuODU5IDIzLjQyLDY4LjgxMiAxLjQ0LDEuMjk3IDEuNDQsMS41NzggMS40NCwyLjAxNiAwLDAuODU5IC0wLjcyLDEuMTU2IC0xLjMsMS4xNTYgLTEuODYsMCAtMTMuNjQsLTEwLjM0NCAtMjAuNjksLTI0LjQyMiAtNy4zMiwtMTQuNTE1IC0xMC42MiwtMjkuODkgLTEwLjYyLC00Ny41NjIgMCwtMTIuNzgyIDIuMDEsLTI5Ljg3NSA5LjQ4LC00NS4yNSA4LjQ3LC0xNy4yMzUgMjAuMjUsLTI2LjU3OCAyMS44MywtMjYuNTc4IDAuNTgsMCAxLjMsMC4yOTYgMS4zLDEuMTU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTg3MS4xOSw2NDkuMTA5IGMgMC4xNCwwLjU3OSAwLjQyLDEuNDM4IDAuNDIsMi4xNTcgMCwxLjQzNyAtMS40NCwxLjQzNyAtMS43MiwxLjQzNyAtMC4xNCwwIC01LjMxLC0wLjQzNyAtNy45MSwtMC43MTkgLTIuNDMsLTAuMTU2IC00LjU5LC0wLjQzNyAtNy4xNywtMC41NzggLTMuNDUsLTAuMjgxIC00LjQ1LC0wLjQzNyAtNC40NSwtMy4wMTUgMCwtMS40MzggMS40NCwtMS40MzggMi44NywtMS40MzggNy4zMiwwIDcuMzIsLTEuMjk3IDcuMzIsLTIuNzM0IDAsLTEgLTEuMTQsLTUuMTcyIC0xLjcyLC03Ljc1IGwgLTMuNDUsLTEzLjc5NyBjIC0xLjQzLC01Ljc1IC05LjYzLC0zOC4zNTkgLTEwLjE5LC00MC45MzggLTAuNzIsLTMuNTkzIC0wLjcyLC02LjAzMSAtMC43MiwtNy45MDYgMCwtMTQuNjU2IDguMTksLTIyLjI2NSAxNy41MSwtMjIuMjY1IDE2LjY4LDAgMzMuOTEsMjEuNDA2IDMzLjkxLDQyLjIzNCAwLDEzLjIxOSAtNy40NywyMi41NjIgLTE4LjIzLDIyLjU2MiAtNy40OSwwIC0xNC4yNCwtNi4xODcgLTE2Ljk2LC05LjA2MiBsIDEwLjQ5LDQxLjgxMiB6IG0gLTkuMDUsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjIsMy40NTMgLTkuNjIsMTQuNjU2IDAsNC43MzQgMC40Miw3LjQ2OSAzLjAxLDE3LjUxNSAwLjQyLDEuODc1IDIuNzIsMTEuMDYzIDMuMywxMi45MzggMC4zLDEuMTQxIDguNzYsMTMuOTM3IDE4LjUzLDEzLjkzNyA2LjMzLDAgOS4yLC02LjMyOCA5LjIsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMywtMjMuMTI1IC03LjYyLC0zMC41OTQgLTMuNiwtNy43NjYgLTEwLjE5LC0xNC42NTYgLTE2LjgsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDg2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5MTAuNjEsNTM4LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTc4LjIsNTk0LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yOCwyLjU3OCAtNi4xNSwtNi4zNTkgLTE0LjksLTYuMzU5IC0xOC4wOCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTksMCA3Ljg1LDAgMTMuMDIsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4zLC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNywwIDAsLTMuMDc4IGMgMy40NywwLjI5NyAxMi4xMiwwLjI5NyAxNi4wOSwwLjI5NyAzLjk3LDAgMTIuNjEsMCAxNi4xLC0wLjI5NyBsIDAsMy4wNzggLTMuMTksMCBjIC04Ljk0LDAgLTkuMjQsMS4wOTQgLTkuMjQsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwNzIuODYsNjczLjc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA0Mi42Niw1NzMuNTQ3IGMgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4zLDAgLTEuNDQsLTAuNDIyIC0yLjE2LC0yLjg1OSAtMy43MywtMTMuMDc4IC05LjYyLC0xNy41MzEgLTE0LjM2LC0xNy41MzEgLTEuNzMsMCAtMy43MywwLjQzNyAtMy43Myw0LjczNCAwLDMuODkxIDEuNzIsOC4xODcgMy4zLDEyLjUgbCAxMC4wNiwyNi43MTkgYyAwLjQyLDEuMTU2IDEuNDQsMy43MzQgMS40NCw2LjQ2OCAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMDYyIDguOTEsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwtMC4xNTYgMy43NCwtNC43NSAwLC0zLjczNCAtMS44OCwtOC40NjggLTMuMDIsLTExLjYyNSBsIC0xMC4wNiwtMjYuNzM0IGMgLTAuODYsLTIuMjk3IC0xLjcyLC00LjU5NCAtMS43MiwtNy4xNzIgMCwtNi40NjkgNC40NiwtMTEuNjQgMTEuMzUsLTExLjY0IDEzLjIxLDAgMTguMzksMjAuOTY4IDE4LjM5LDIxLjk4NCB6IG0gLTEuMTYsNjkuMDk0IGMgMCwyLjE1NiAtMS43Miw0LjczNCAtNC44Nyw0LjczNCAtMy4zMiwwIC03LjA1LC0zLjE1NiAtNy4wNSwtNi44OTEgMCwtMy41OTMgMy4wMSwtNC43MzQgNC43NSwtNC43MzQgMy44NywwIDcuMTcsMy43MzQgNy4xNyw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwNzUuMTMsNjQxLjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIxNzEuMzEsNTg2LjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCAzOS42NCwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OSwtNC41OTMgMi43MiwwIDIuNzIsMi40MzcgMi43Miw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjI4OC4xOSw2NDkuMTA5IGMgMC4xNCwwLjU3OSAwLjQyLDEuNDM4IDAuNDIsMi4xNTcgMCwxLjQzNyAtMS40NCwxLjQzNyAtMS43MiwxLjQzNyAtMC4xNCwwIC01LjMxLC0wLjQzNyAtNy45MSwtMC43MTkgLTIuNDMsLTAuMTU2IC00LjU5LC0wLjQzNyAtNy4xNywtMC41NzggLTMuNDUsLTAuMjgxIC00LjQ1LC0wLjQzNyAtNC40NSwtMy4wMTUgMCwtMS40MzggMS40NCwtMS40MzggMi44NywtMS40MzggNy4zMiwwIDcuMzIsLTEuMjk3IDcuMzIsLTIuNzM0IDAsLTEgLTEuMTQsLTUuMTcyIC0xLjcyLC03Ljc1IGwgLTMuNDUsLTEzLjc5NyBjIC0xLjQzLC01Ljc1IC05LjYzLC0zOC4zNTkgLTEwLjE5LC00MC45MzggLTAuNzIsLTMuNTkzIC0wLjcyLC02LjAzMSAtMC43MiwtNy45MDYgMCwtMTQuNjU2IDguMTksLTIyLjI2NSAxNy41MSwtMjIuMjY1IDE2LjY4LDAgMzMuOTEsMjEuNDA2IDMzLjkxLDQyLjIzNCAwLDEzLjIxOSAtNy40NywyMi41NjIgLTE4LjIzLDIyLjU2MiAtNy40OSwwIC0xNC4yNCwtNi4xODcgLTE2Ljk2LC05LjA2MiBsIDEwLjQ5LDQxLjgxMiB6IG0gLTkuMDUsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjIsMy40NTMgLTkuNjIsMTQuNjU2IDAsNC43MzQgMC40Miw3LjQ2OSAzLjAxLDE3LjUxNSAwLjQyLDEuODc1IDIuNzIsMTEuMDYzIDMuMywxMi45MzggMC4zLDEuMTQxIDguNzYsMTMuOTM3IDE4LjUzLDEzLjkzNyA2LjMzLDAgOS4yLC02LjMyOCA5LjIsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMywtMjMuMTI1IC03LjYyLC0zMC41OTQgLTMuNiwtNy43NjYgLTEwLjE5LC0xNC42NTYgLTE2LjgsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMzI3LjYxLDUzOC42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTAyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzNzcuNjEsNTM4LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjQ5OS44Niw2NzMuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjQ2OS4yOCw1OTguNTQ3IGMgMC41OCwyLjI5NyAwLjU4LDQuMjk3IDAuNTgsNC44NzUgMCw4LjMyOCAtNi4xOSwxMi45MzcgLTEyLjY0LDEyLjkzNyAtMTQuNTIsMCAtMjIuMjcsLTIwLjk4NCAtMjIuMjcsLTIxLjk4NCAwLC0wLjcxOSAwLjU3LC0xLjI5NyAxLjQzLC0xLjI5NyAxLjE1LDAgMS4yOSwwLjU3OCAyLjAxLDIuMDE2IDUuNzUsMTMuOTM3IDEyLjk0LDE4LjM5IDE4LjM5LDE4LjM5IDMuMDIsMCA0LjYsLTEuNTc4IDQuNiwtNi42MDkgMCwtMy40NTMgLTAuNDMsLTQuODkxIC0xLC03LjQ2OSBsIC0xMy42NiwtNTQuMTU2IGMgLTIuNzIsLTEwLjY0MSAtOS40NywtMTguNjg3IC0xNy4zOCwtMTguNjg3IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNyAzLjQ1LDAuNzE5IDYuMTgsMy40NTMgNi4xOCw2LjkwNiAwLDIuMjk3IC0xLjczLDQuNTk0IC00Ljg5LDQuNTk0IC0zLjczLDAgLTcuMTgsLTMuMTcyIC03LjE4LC03LjQ2OSAwLC01Ljg5IDYuMzIsLTguMzQzIDEyLjIxLC04LjM0MyA5LjkxLDAgMjIuOTksNy4zMjggMjYuNTgsMjEuNzAzIGwgMTMuMzYsNTMuMTU2IHogbSA1Ljg5LDQ0LjA5NCBjIDAsMy41OTMgLTMuMDEsNC43MzQgLTQuNzUsNC43MzQgLTMuODcsMCAtNy4xNywtMy43MzQgLTcuMTcsLTYuODkxIDAsLTIuMTU2IDEuNzIsLTQuNzM0IDQuODgsLTQuNzM0IDMuMzEsMCA3LjA0LDMuMTU2IDcuMDQsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjUxMC4xMyw2NDEuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNCwtMS4yOTcgLTAuNCwtMS4zOSAwLC0xLjA5NCAyLjU5LC0xLjc5NyAzLjM5LC0xLjc5NyAwLjU5LDAgMC42OCwwLjI5NyAxLjI4LDEuNTk0IGwgMTcuNTgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTEwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1NTguNTIsNTg4Ljc2NiBjIDAsMTAuOTIyIC0xLjQ0LDI4LjczNCAtOS40OSw0NS40MDYgLTguNDgsMTcuMjM0IC0yMC4yNSwyNi41NzggLTIxLjg0LDI2LjU3OCAtMC41NiwwIC0xLjI4LC0wLjI5NyAtMS4yOCwtMS4xNTYgMCwtMC40MzggMCwtMC43MTkgMi40MywtMy4xNTYgMTQuMzYsLTE0LjUxNiAyMi40MSwtMzguMjE5IDIyLjQxLC02Ny41MTYgMCwtMjcuODc1IC02Ljc1LC01MS44NzUgLTIzLjQxLC02OC44MTMgLTEuNDMsLTEuMjk2IC0xLjQzLC0xLjU5MyAtMS40MywtMi4wMTUgMCwtMC44NiAwLjcyLC0xLjE1NiAxLjI4LC0xLjE1NiAxLjg3LDAgMTMuNjUsMTAuMzQzIDIwLjY5LDI0LjQyMSA3LjMyLDE0LjY1NyAxMC42NCwzMC4xNzIgMTAuNjQsNDcuNDA3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTEyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI3OTIuOTcsNTk5LjU0NyBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM0IC0yLjQzLDIuNzM0IC00LjU5LDIuNzM0IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4IDAsLTIuNzM0IDIuNDUsLTIuNzM0IDQuNjEsLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzUgLTIuNDMsMi43MzUgLTQuNTksMi43MzUgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTQgMCwtMi43MTkgMi40NSwtMi43MTkgNC42MSwtMi43MTkgbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTE0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI2NS45NjksMzU0LjU0NyBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM1IC0yLjQzOCwyLjczNSAtNC41OTQsMi43MzUgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41OTQgMCwtMi43MTkgMi40NTMsLTIuNzE5IDQuNjA5LC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDI0LjY4OCwyNzMuMDk0IGMgMCwwLjQyMiAwLDAuNzE5IC0yLjQzOCwzLjE1NiAtMTQuMzc1LDE0LjUxNiAtMjIuNDIyLDM4LjIxOSAtMjIuNDIyLDY3LjUxNiAwLDI3Ljg3NSA2Ljc2Niw1MS44NTkgMjMuNDIyLDY4LjgxMiAxLjQzOCwxLjI5NyAxLjQzOCwxLjU3OCAxLjQzOCwyLjAxNiAwLDAuODU5IC0wLjcxOSwxLjE1NiAtMS4yOTcsMS4xNTYgLTEuODYsMCAtMTMuNjQxLC0xMC4zNDQgLTIwLjY4OCwtMjQuNDIyIC03LjMyOCwtMTQuNTE1IC0xMC42MjUsLTI5Ljg5IC0xMC42MjUsLTQ3LjU2MiAwLC0xMi43ODIgMi4wMTYsLTI5Ljg3NSA5LjQ4NSwtNDUuMjUgOC40NjgsLTE3LjIzNSAyMC4yNSwtMjYuNTc4IDIxLjgyOCwtMjYuNTc4IDAuNTc4LDAgMS4yOTcsMC4yOTYgMS4yOTcsMS4xNTYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDY2LjE4OCw0MDQuMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NSAtOS42MjUsLTM4LjM1OSAtMTAuMTg3LC00MC45MzggLTAuNzE5LC0zLjU5MyAtMC43MTksLTYuMDMxIC0wLjcxOSwtNy45MDYgMCwtMTQuNjU2IDguMTg3LC0yMi4yNjUgMTcuNTE1LC0yMi4yNjUgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNiAzMy45MDcsNDIuMjM0IDAsMTMuMjE5IC03LjQ2OSwyMi41NjIgLTE4LjIzNSwyMi41NjIgLTcuNDg0LDAgLTE0LjIzNCwtNi4xODcgLTE2Ljk1MywtOS4wNjIgbCAxMC40ODUsNDEuODEyIHogbSAtOS4wNDcsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzIC05LjYyNSwxNC42NTYgMCw0LjczNCAwLjQyMiw3LjQ2OSAzLjAxNSwxNy41MTUgMC40MjIsMS44NzUgMi43MTksMTEuMDYzIDMuMjk3LDEyLjkzOCAwLjI5NywxLjE0MSA4Ljc2NiwxMy45MzcgMTguNTMxLDEzLjkzNyA2LjMyOSwwIDkuMjA0LC02LjMyOCA5LjIwNCwtMTMuNzk2IDAsLTYuODkxIC00LjAzMiwtMjMuMTI1IC03LjYyNSwtMzAuNTk0IC0zLjU5NCwtNy43NjYgLTEwLjE4OCwtMTQuNjU2IC0xNi43OTcsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1MjIuMjAzLDM1MC41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTczLjIwMywzNTAuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY2MS42NTYsMzYxLjczNCBjIDAsOS4wNDcgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMgLTYuNjA5LC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU3OCwtMy4yOTcgMS40MzgsLTEuMjk2IDUuMTcyLC01LjE3MSA1LjE3MiwtMTIuNjU2IDAsLTYuMDMxIC04LjYyNSwtMzkuNjQgLTI1Ljg1OSwtMzkuNjQgLTguNzY2LDAgLTEwLjQ4NSw3LjMyOCAtMTAuNDg1LDEyLjY0IDAsNy4xODggMy4yOTcsMTcuMjM1IDcuMTg4LDI3LjU3OCAyLjI5Nyw1Ljg5MSAyLjg3NSw3LjMyOCAyLjg3NSwxMC4yMDMgMCw2LjAzMiAtNC4zMTMsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjE4LDAgLTE4LjUzMSwtMjAuODQzIC0xOC41MzEsLTIxLjk4NCAwLC0wLjU3OCAwLjU3OCwtMS4yOTcgMS41NzgsLTEuMjk3IDEuMjk3LDAgMS40MzgsMC41NzggMi4wMTYsMi41OTQgMy40NTMsMTIuMzQ0IDkuMDQ3LDE3LjgxMiAxNC41MTUsMTcuODEyIDEuMjgyLDAgMy43MzUsMCAzLjczNSwtNC43NSAwLC0zLjczNCAtMS41NzgsLTcuODkgLTMuNzM1LC0xMy4zNTkgLTYuOTA2LC0xOC4zOTEgLTYuOTA2LC0yMi44NDQgLTYuOTA2LC0yNi4yODEgMCwtMy4xNzIgMC40MzgsLTkuMDQ3IDQuODkxLC0xMy4wNzggNS4xNzIsLTQuNDUzIDEyLjM1OSwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDQ3LDQ2Ljk4NCAzMi4wNDcsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY5OC4xNzIsMzE3IGMgMC42MDksMi41NzggMi44OTEsMTEuNzE5IDkuODQ0LDExLjcxOSAwLjUsMCAyLjg3NSwwIDQuOTY4LC0xLjI4MSAtMi43ODEsLTAuNSAtNC43NjUsLTIuOTg1IC00Ljc2NSwtNS4zNzUgMCwtMS41NzkgMS4wNzgsLTMuNDY5IDMuNzY1LC0zLjQ2OSAyLjE4OCwwIDUuMzYsMS43ODEgNS4zNiw1Ljc1IDAsNS4xNzIgLTUuODYsNi41NjIgLTkuMjM1LDYuNTYyIC01Ljc2NSwwIC05LjIzNCwtNS4yNjUgLTEwLjQyMSwtNy41NDcgLTIuNDg1LDYuNTQ3IC03Ljg2LDcuNTQ3IC0xMC43MzUsNy41NDcgLTEwLjMyOCwwIC0xNiwtMTIuODEyIC0xNiwtMTUuMjk3IDAsLTEgMSwtMSAxLjIwMywtMSAwLjc5NywwIDEuMDk0LDAuMjA0IDEuMjgyLDEuMDk0IDMuMzksMTAuNTMxIDkuOTM3LDEzLjAxNiAxMy4zMTIsMTMuMDE2IDEuODkxLDAgNS4zNzUsLTAuODkxIDUuMzc1LC02LjY1NiAwLC0zLjA3OSAtMS42ODcsLTkuNzM1IC01LjM3NSwtMjMuNjQxIC0xLjU3OCwtNi4xNTYgLTUuMDYyLC0xMC4zMjggLTkuNDM3LC0xMC4zMjggLTAuNTk0LDAgLTIuODc1LDAgLTQuOTY5LDEuMjk3IDIuNDg0LDAuNDg0IDQuNjcyLDIuNTc4IDQuNjcyLDUuMzU5IDAsMi42ODggLTIuMTg4LDMuNDY5IC0zLjY3MiwzLjQ2OSAtMi45ODUsMCAtNS40NjksLTIuNTc4IC01LjQ2OSwtNS43NSAwLC00LjU3OCA0Ljk2OSwtNi41NjMgOS4zNDQsLTYuNTYzIDYuNTYyLDAgMTAuMTI1LDYuOTUzIDEwLjQzNyw3LjU0NyAxLjE4OCwtMy42NzIgNC43NjYsLTcuNTQ3IDEwLjcxOSwtNy41NDcgMTAuMjM0LDAgMTUuODkxLDEyLjgxMyAxNS44OTEsMTUuMjk3IDAsMSAtMC44OTEsMSAtMS4xODgsMSAtMC44OSwwIC0xLjA5NCwtMC40MDYgLTEuMjk3LC0xLjA5NCAtMy4yNjUsLTEwLjYyNSAtMTAuMDMxLC0xMy4wMTUgLTEzLjIwMywtMTMuMDE1IC0zLjg3NSwwIC01LjQ2OSwzLjE3MiAtNS40NjksNi41NjIgMCwyLjE3MiAwLjU5NCw0LjM2IDEuNjg4LDguNzM1IEwgNjk4LjE3MiwzMTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODE1LjMxMywzNDEuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTMwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDkzMy4xODgsNDA0LjEwOSBjIDAuMTQsMC41NzkgMC40MjEsMS40MzggMC40MjEsMi4xNTcgMCwxLjQzNyAtMS40MzcsMS40MzcgLTEuNzE4LDEuNDM3IC0wLjE0MSwwIC01LjMxMywtMC40MzcgLTcuOTA3LC0wLjcxOSAtMi40MzcsLTAuMTU2IC00LjU5MywtMC40MzcgLTcuMTcxLC0wLjU3OCAtMy40NTQsLTAuMjgxIC00LjQ1NCwtMC40MzcgLTQuNDU0LC0zLjAxNSAwLC0xLjQzOCAxLjQzOCwtMS40MzggMi44NzUsLTEuNDM4IDcuMzEzLDAgNy4zMTMsLTEuMjk3IDcuMzEzLC0yLjczNCAwLC0xIC0xLjE0MSwtNS4xNzIgLTEuNzE5LC03Ljc1IGwgLTMuNDUzLC0xMy43OTcgYyAtMS40MjIsLTUuNzUgLTkuNjI1LC0zOC4zNTkgLTEwLjE4NywtNDAuOTM4IC0wLjcxOSwtMy41OTMgLTAuNzE5LC02LjAzMSAtMC43MTksLTcuOTA2IDAsLTE0LjY1NiA4LjE4NywtMjIuMjY1IDE3LjUxNSwtMjIuMjY1IDE2LjY3MiwwIDMzLjkwNywyMS40MDYgMzMuOTA3LDQyLjIzNCAwLDEzLjIxOSAtNy40NjksMjIuNTYyIC0xOC4yMzUsMjIuNTYyIC03LjQ4NCwwIC0xNC4yMzQsLTYuMTg3IC0xNi45NTMsLTkuMDYyIGwgMTAuNDg1LDQxLjgxMiB6IG0gLTkuMDQ3LC05NC42NzEgYyAtNC42MSwwIC05LjYyNSwzLjQ1MyAtOS42MjUsMTQuNjU2IDAsNC43MzQgMC40MjIsNy40NjkgMy4wMTUsMTcuNTE1IDAuNDIyLDEuODc1IDIuNzE5LDExLjA2MyAzLjI5NywxMi45MzggMC4yOTcsMS4xNDEgOC43NjYsMTMuOTM3IDE4LjUzMSwxMy45MzcgNi4zMjksMCA5LjIwNCwtNi4zMjggOS4yMDQsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMzIsLTIzLjEyNSAtNy42MjUsLTMwLjU5NCAtMy41OTQsLTcuNzY2IC0xMC4xODgsLTE0LjY1NiAtMTYuNzk3LC0xNC42NTYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTcyLjYwOSwyOTQuNjU2IDEwLjUzMiwxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NjksMTkuMDc4IDIxLjQ2OSwyOS4wMTYgMCwxMS4zMjggLTguOTU0LDE5LjI2NSAtMjEuMDYzLDE5LjI2NSAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNCAtMTguNTc4LC0xNy45ODQgMCwtNS41NjMgNC45NjksLTUuNTYzIDUuMjY1LC01LjU2MyAxLjY4OCwwIDUuMTU3LDEuMjA0IDUuMTU3LDUuMjY2IDAsMi41OTQgLTEuNzgyLDUuMTcyIC01LjI2Niw1LjE3MiAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDk0IDIuMjgxLDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ3IDEzLjMxMywtMTYuMTg3IDAsLTcuOTUzIC00Ljk2OSwtMTUuNzk3IC0xMC40MzgsLTIxLjk1MyBsIC0xOS4wNjIsLTIxLjI2NiBjIC0xLjA5NCwtMS4wOTQgLTEuMDk0LC0xLjI4MSAtMS4wOTQsLTMuNjcyIGwgMzYuODYxLDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOTIsLTguODQzIC0wLjcwNCwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQzOCwtMC43ODIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAzOS4yLDM1MC41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgsMi41NzggLTYuMTUsLTYuMzU5IC0xNC45LC02LjM1OSAtMTguMDgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk5LDAgNy44NSwwIDEzLjAyLDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMywtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcsMCAwLC0zLjA3OCBjIDMuNDcsMC4yOTcgMTIuMTIsMC4yOTcgMTYuMDksMC4yOTcgMy45NywwIDEyLjYxLDAgMTYuMSwtMC4yOTcgbCAwLDMuMDc4IC0zLjE5LDAgYyAtOC45NCwwIC05LjI0LDEuMDk0IC05LjI0LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTEyOS42NiwzNjEuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTM4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExODEuMjgsMzI0Ljg0NCBjIDAuMzksMS4zOSAwLjM5LDEuNTk0IDAuMzksMi4yODEgMCwxLjc5NyAtMS4zOSwyLjY4OCAtMi44NywyLjY4OCAtMSwwIC0yLjU4LC0wLjU5NCAtMy40OSwtMi4wNzkgLTAuMTgsLTAuNSAtMC45OCwtMy41NzggLTEuMzksLTUuMzc1IC0wLjY5LC0yLjU3OCAtMS4zOSwtNS4yNjUgLTEuOTgsLTcuOTM3IGwgLTQuNDcsLTE3Ljg5MSBjIC0wLjM5LC0xLjQ4NCAtNC42NywtOC40MzcgLTExLjIyLC04LjQzNyAtNS4wOCwwIC02LjE2LDQuMzc1IC02LjE2LDguMDQ3IDAsNC41NjIgMS42OSwxMC43MzQgNS4wNywxOS40NjggMS41Nyw0LjA3OSAxLjk4LDUuMTcyIDEuOTgsNy4xNTcgMCw0LjQ2OCAtMy4xOSw4LjE0IC04LjE0LDguMTQgLTkuNDQsMCAtMTMuMTIsLTE0LjQwNiAtMTMuMTIsLTE1LjI5NyAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMjA0IDEuNTgsMS43OTcgMi42OCw5LjMyOCA2LjY1LDEyLjMxMyAxMC4wMywxMi4zMTMgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MiAwLC0yLjQ4NCAtMC45OCwtNS4wNjMgLTEuNjksLTYuOTUzIC0zLjk2LC0xMC41MzEgLTUuNzUsLTE2LjIwMyAtNS43NSwtMjAuODYgMCwtOC44NDMgNi4yNSwtMTEuODI4IDEyLjExLC0xMS44MjggMy44OCwwIDcuMjUsMS42ODggMTAuMDQsNC40NjkgLTEuMjksLTUuMTU2IC0yLjQ5LC0xMC4wMzEgLTYuNDYsLTE1LjI5NyAtMi41OCwtMy4zNzUgLTYuMzYsLTYuMjUgLTEwLjkyLC02LjI1IC0xLjM5LDAgLTUuODYsMC4yOTcgLTcuNTUsNC4xNzIgMS41OCwwIDIuODgsMCA0LjI3LDEuMTg4IDEsMC44OSAxLjk4LDIuMTg3IDEuOTgsNC4wNzggMCwzLjA3OCAtMi42OCwzLjQ2OCAtMy42NywzLjQ2OCAtMi4yOCwwIC01LjU2LC0xLjU5MyAtNS41NiwtNi40NTMgMCwtNC45NjggNC4zNywtOC42NCAxMC41MywtOC42NCAxMC4yMywwIDIwLjQ1LDkuMDMxIDIzLjIzLDIwLjI2NSBsIDkuNTUsMzcuOTM4IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMjkuNTIsMzQzLjc2NiBjIDAsMTAuOTIyIC0xLjQ0LDI4LjczNCAtOS40OSw0NS40MDYgLTguNDgsMTcuMjM0IC0yMC4yNSwyNi41NzggLTIxLjg0LDI2LjU3OCAtMC41NiwwIC0xLjI4LC0wLjI5NyAtMS4yOCwtMS4xNTYgMCwtMC40MzggMCwtMC43MTkgMi40MywtMy4xNTYgMTQuMzYsLTE0LjUxNiAyMi40MSwtMzguMjE5IDIyLjQxLC02Ny41MTYgMCwtMjcuODc1IC02Ljc1LC01MS44NzUgLTIzLjQxLC02OC44MTMgLTEuNDMsLTEuMjk2IC0xLjQzLC0xLjU5MyAtMS40MywtMi4wMTUgMCwtMC44NiAwLjcyLC0xLjE1NiAxLjI4LC0xLjE1NiAxLjg3LDAgMTMuNjUsMTAuMzQzIDIwLjY5LDI0LjQyMSA3LjMyLDE0LjY1NyAxMC42NCwzMC4xNzIgMTAuNjQsNDcuNDA3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEzMTQuODYsNDI4Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQ0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyODQuNjYsMzI4LjU0NyBjIDAsMC43MTkgLTAuNTgsMS4yODEgLTEuNDQsMS4yODEgLTEuMywwIC0xLjQ0LC0wLjQyMiAtMi4xNiwtMi44NTkgLTMuNzMsLTEzLjA3OCAtOS42MiwtMTcuNTMxIC0xNC4zNiwtMTcuNTMxIC0xLjczLDAgLTMuNzMsMC40MzcgLTMuNzMsNC43MzQgMCwzLjg5MSAxLjcyLDguMTg3IDMuMywxMi41IGwgMTAuMDYsMjYuNzE5IGMgMC40MiwxLjE1NiAxLjQ0LDMuNzM0IDEuNDQsNi40NjggMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjA2MiA4LjkxLDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsLTAuMTU2IDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuODgsLTguNDY4IC0zLjAyLC0xMS42MjUgbCAtMTAuMDYsLTI2LjczNCBjIC0wLjg2LC0yLjI5NyAtMS43MiwtNC41OTQgLTEuNzIsLTcuMTcyIDAsLTYuNDY5IDQuNDYsLTExLjY0IDExLjM1LC0xMS42NCAxMy4yMSwwIDE4LjM5LDIwLjk2OCAxOC4zOSwyMS45ODQgeiBtIC0xLjE2LDY5LjA5NCBjIDAsMi4xNTYgLTEuNzIsNC43MzQgLTQuODcsNC43MzQgLTMuMzIsMCAtNy4wNSwtMy4xNTYgLTcuMDUsLTYuODkxIDAsLTMuNTkzIDMuMDEsLTQuNzM0IDQuNzUsLTQuNzM0IDMuODcsMCA3LjE3LDMuNzM0IDcuMTcsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTMxNy4xMywzOTYuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNCwtMS4yOTcgLTAuNCwtMS4zOSAwLC0xLjA5NCAyLjU5LC0xLjc5NyAzLjM5LC0xLjc5NyAwLjU5LDAgMC42OCwwLjI5NyAxLjI4LDEuNTk0IGwgMTcuNTgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQ4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0ODEuMzEsMzQxLjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCAzOS42NCwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OSwtNC41OTMgMi43MiwwIDIuNzIsMi40MzcgMi43Miw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTUwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE2NzkuNjksMjczLjA5NCBjIDAsMC40MjIgMCwwLjcxOSAtMi40NCwzLjE1NiAtMTQuMzcsMTQuNTE2IC0yMi40MiwzOC4yMTkgLTIyLjQyLDY3LjUxNiAwLDI3Ljg3NSA2Ljc2LDUxLjg1OSAyMy40Miw2OC44MTIgMS40NCwxLjI5NyAxLjQ0LDEuNTc4IDEuNDQsMi4wMTYgMCwwLjg1OSAtMC43MiwxLjE1NiAtMS4zLDEuMTU2IC0xLjg2LDAgLTEzLjY0LC0xMC4zNDQgLTIwLjY5LC0yNC40MjIgLTcuMzIsLTE0LjUxNSAtMTAuNjIsLTI5Ljg5IC0xMC42MiwtNDcuNTYyIDAsLTEyLjc4MiAyLjAxLC0yOS44NzUgOS40OCwtNDUuMjUgOC40NywtMTcuMjM1IDIwLjI1LC0yNi41NzggMjEuODMsLTI2LjU3OCAwLjU4LDAgMS4zLDAuMjk2IDEuMywxLjE1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzIxLjE5LDQwNC4xMDkgYyAwLjE0LDAuNTc5IDAuNDIsMS40MzggMC40MiwyLjE1NyAwLDEuNDM3IC0xLjQ0LDEuNDM3IC0xLjcyLDEuNDM3IC0wLjE0LDAgLTUuMzEsLTAuNDM3IC03LjkxLC0wLjcxOSAtMi40MywtMC4xNTYgLTQuNTksLTAuNDM3IC03LjE3LC0wLjU3OCAtMy40NSwtMC4yODEgLTQuNDUsLTAuNDM3IC00LjQ1LC0zLjAxNSAwLC0xLjQzOCAxLjQ0LC0xLjQzOCAyLjg3LC0xLjQzOCA3LjMyLDAgNy4zMiwtMS4yOTcgNy4zMiwtMi43MzQgMCwtMSAtMS4xNCwtNS4xNzIgLTEuNzIsLTcuNzUgbCAtMy40NSwtMTMuNzk3IGMgLTEuNDMsLTUuNzUgLTkuNjMsLTM4LjM1OSAtMTAuMTksLTQwLjkzOCAtMC43MiwtMy41OTMgLTAuNzIsLTYuMDMxIC0wLjcyLC03LjkwNiAwLC0xNC42NTYgOC4xOSwtMjIuMjY1IDE3LjUxLC0yMi4yNjUgMTYuNjgsMCAzMy45MSwyMS40MDYgMzMuOTEsNDIuMjM0IDAsMTMuMjE5IC03LjQ3LDIyLjU2MiAtMTguMjMsMjIuNTYyIC03LjQ5LDAgLTE0LjI0LC02LjE4NyAtMTYuOTYsLTkuMDYyIGwgMTAuNDksNDEuODEyIHogbSAtOS4wNSwtOTQuNjcxIGMgLTQuNjEsMCAtOS42MiwzLjQ1MyAtOS42MiwxNC42NTYgMCw0LjczNCAwLjQyLDcuNDY5IDMuMDEsMTcuNTE1IDAuNDIsMS44NzUgMi43MiwxMS4wNjMgMy4zLDEyLjkzOCAwLjMsMS4xNDEgOC43NiwxMy45MzcgMTguNTMsMTMuOTM3IDYuMzMsMCA5LjIsLTYuMzI4IDkuMiwtMTMuNzk2IDAsLTYuODkxIC00LjAzLC0yMy4xMjUgLTcuNjIsLTMwLjU5NCAtMy42LC03Ljc2NiAtMTAuMTksLTE0LjY1NiAtMTYuOCwtMTQuNjU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE3NzcuMiwzNTAuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4LDIuNTc4IC02LjE1LC02LjM1OSAtMTQuOSwtNi4zNTkgLTE4LjA4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjMsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3LDAgMCwtMy4wNzggYyAzLjQ3LDAuMjk3IDEyLjEyLDAuMjk3IDE2LjA5LDAuMjk3IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk3IGwgMCwzLjA3OCAtMy4xOSwwIGMgLTguOTQsMCAtOS4yNCwxLjA5NCAtOS4yNCw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4MTEuNjEsMjk0LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTkxNy42NiwzNjEuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTYwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5NTMuMTcsMzE3IGMgMC42MSwyLjU3OCAyLjg5LDExLjcxOSA5Ljg1LDExLjcxOSAwLjUsMCAyLjg3LDAgNC45NiwtMS4yODEgLTIuNzgsLTAuNSAtNC43NiwtMi45ODUgLTQuNzYsLTUuMzc1IDAsLTEuNTc5IDEuMDgsLTMuNDY5IDMuNzYsLTMuNDY5IDIuMTksMCA1LjM2LDEuNzgxIDUuMzYsNS43NSAwLDUuMTcyIC01Ljg2LDYuNTYyIC05LjIzLDYuNTYyIC01Ljc3LDAgLTkuMjMsLTUuMjY1IC0xMC40MiwtNy41NDcgLTIuNDksNi41NDcgLTcuODYsNy41NDcgLTEwLjc0LDcuNTQ3IC0xMC4zMiwwIC0xNiwtMTIuODEyIC0xNiwtMTUuMjk3IDAsLTEgMSwtMSAxLjIxLC0xIDAuNzksMCAxLjA5LDAuMjA0IDEuMjgsMS4wOTQgMy4zOSwxMC41MzEgOS45NCwxMy4wMTYgMTMuMzEsMTMuMDE2IDEuODksMCA1LjM4LC0wLjg5MSA1LjM4LC02LjY1NiAwLC0zLjA3OSAtMS42OSwtOS43MzUgLTUuMzgsLTIzLjY0MSAtMS41OCwtNi4xNTYgLTUuMDYsLTEwLjMyOCAtOS40NCwtMTAuMzI4IC0wLjU5LDAgLTIuODcsMCAtNC45NywxLjI5NyAyLjQ5LDAuNDg0IDQuNjgsMi41NzggNC42OCw1LjM1OSAwLDIuNjg4IC0yLjE5LDMuNDY5IC0zLjY4LDMuNDY5IC0yLjk4LDAgLTUuNDYsLTIuNTc4IC01LjQ2LC01Ljc1IDAsLTQuNTc4IDQuOTYsLTYuNTYzIDkuMzQsLTYuNTYzIDYuNTYsMCAxMC4xMiw2Ljk1MyAxMC40NCw3LjU0NyAxLjE4LC0zLjY3MiA0Ljc2LC03LjU0NyAxMC43MiwtNy41NDcgMTAuMjMsMCAxNS44OSwxMi44MTMgMTUuODksMTUuMjk3IDAsMSAtMC44OSwxIC0xLjE5LDEgLTAuODksMCAtMS4xLC0wLjQwNiAtMS4zLC0xLjA5NCAtMy4yNiwtMTAuNjI1IC0xMC4wMywtMTMuMDE1IC0xMy4yLC0xMy4wMTUgLTMuODgsMCAtNS40NywzLjE3MiAtNS40Nyw2LjU2MiAwLDIuMTcyIDAuNTksNC4zNiAxLjY5LDguNzM1IGwgMy4zNywxMy42MDkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA3MS4zMSwzNDEuMTg4IDM5LjY2LDAgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDM5LjY0LDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5LC00LjU5MyAyLjcyLDAgMi43MiwyLjQzNyAyLjcyLDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjE4Ny4xOSw0MDQuMTA5IGMgMC4xNCwwLjU3OSAwLjQyLDEuNDM4IDAuNDIsMi4xNTcgMCwxLjQzNyAtMS40NCwxLjQzNyAtMS43MiwxLjQzNyAtMC4xNCwwIC01LjMxLC0wLjQzNyAtNy45MSwtMC43MTkgLTIuNDMsLTAuMTU2IC00LjU5LC0wLjQzNyAtNy4xNywtMC41NzggLTMuNDUsLTAuMjgxIC00LjQ1LC0wLjQzNyAtNC40NSwtMy4wMTUgMCwtMS40MzggMS40NCwtMS40MzggMi44NywtMS40MzggNy4zMiwwIDcuMzIsLTEuMjk3IDcuMzIsLTIuNzM0IDAsLTEgLTEuMTQsLTUuMTcyIC0xLjcyLC03Ljc1IGwgLTMuNDUsLTEzLjc5NyBjIC0xLjQzLC01Ljc1IC05LjYzLC0zOC4zNTkgLTEwLjE5LC00MC45MzggLTAuNzIsLTMuNTkzIC0wLjcyLC02LjAzMSAtMC43MiwtNy45MDYgMCwtMTQuNjU2IDguMTksLTIyLjI2NSAxNy41MSwtMjIuMjY1IDE2LjY4LDAgMzMuOTEsMjEuNDA2IDMzLjkxLDQyLjIzNCAwLDEzLjIxOSAtNy40NywyMi41NjIgLTE4LjIzLDIyLjU2MiAtNy40OSwwIC0xNC4yNCwtNi4xODcgLTE2Ljk2LC05LjA2MiBsIDEwLjQ5LDQxLjgxMiB6IG0gLTkuMDUsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjIsMy40NTMgLTkuNjIsMTQuNjU2IDAsNC43MzQgMC40Miw3LjQ2OSAzLjAxLDE3LjUxNSAwLjQyLDEuODc1IDIuNzIsMTEuMDYzIDMuMywxMi45MzggMC4zLDEuMTQxIDguNzYsMTMuOTM3IDE4LjUzLDEzLjkzNyA2LjMzLDAgOS4yLC02LjMyOCA5LjIsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMywtMjMuMTI1IC03LjYyLC0zMC41OTQgLTMuNiwtNy43NjYgLTEwLjE5LC0xNC42NTYgLTE2LjgsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjI2LjYxLDI5NC42NTYgMTAuNTMsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDcsMTkuMDc4IDIxLjQ3LDI5LjAxNiAwLDExLjMyOCAtOC45NSwxOS4yNjUgLTIxLjA2LDE5LjI2NSAtMTEuMjQsMCAtMTguNTgsLTkuMTQgLTE4LjU4LC0xNy45ODQgMCwtNS41NjMgNC45NywtNS41NjMgNS4yNiwtNS41NjMgMS42OSwwIDUuMTYsMS4yMDQgNS4xNiw1LjI2NiAwLDIuNTk0IC0xLjc4LDUuMTcyIC01LjI2LDUuMTcyIC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTQgMi4yOSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NyAxMy4zMSwtMTYuMTg3IDAsLTcuOTUzIC00Ljk3LC0xNS43OTcgLTEwLjQzLC0yMS45NTMgbCAtMTkuMDcsLTIxLjI2NiBjIC0xLjA5LC0xLjA5NCAtMS4wOSwtMS4yODEgLTEuMDksLTMuNjcyIGwgMzYuODYsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIyNzYuNjEsMjk0LjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNzAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjM4My42NiwzNjEuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTcyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI0MzUuMjgsMzI0Ljg0NCBjIDAuMzksMS4zOSAwLjM5LDEuNTk0IDAuMzksMi4yODEgMCwxLjc5NyAtMS4zOSwyLjY4OCAtMi44NywyLjY4OCAtMSwwIC0yLjU4LC0wLjU5NCAtMy40OSwtMi4wNzkgLTAuMTgsLTAuNSAtMC45OCwtMy41NzggLTEuMzksLTUuMzc1IC0wLjY5LC0yLjU3OCAtMS4zOSwtNS4yNjUgLTEuOTgsLTcuOTM3IGwgLTQuNDcsLTE3Ljg5MSBjIC0wLjM5LC0xLjQ4NCAtNC42NywtOC40MzcgLTExLjIyLC04LjQzNyAtNS4wOCwwIC02LjE2LDQuMzc1IC02LjE2LDguMDQ3IDAsNC41NjIgMS42OSwxMC43MzQgNS4wNywxOS40NjggMS41Nyw0LjA3OSAxLjk4LDUuMTcyIDEuOTgsNy4xNTcgMCw0LjQ2OCAtMy4xOSw4LjE0IC04LjE0LDguMTQgLTkuNDQsMCAtMTMuMTIsLTE0LjQwNiAtMTMuMTIsLTE1LjI5NyAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMjA0IDEuNTgsMS43OTcgMi42OCw5LjMyOCA2LjY1LDEyLjMxMyAxMC4wMywxMi4zMTMgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MiAwLC0yLjQ4NCAtMC45OCwtNS4wNjMgLTEuNjksLTYuOTUzIC0zLjk2LC0xMC41MzEgLTUuNzUsLTE2LjIwMyAtNS43NSwtMjAuODYgMCwtOC44NDMgNi4yNSwtMTEuODI4IDEyLjExLC0xMS44MjggMy44OCwwIDcuMjUsMS42ODggMTAuMDQsNC40NjkgLTEuMjksLTUuMTU2IC0yLjQ5LC0xMC4wMzEgLTYuNDYsLTE1LjI5NyAtMi41OCwtMy4zNzUgLTYuMzYsLTYuMjUgLTEwLjkyLC02LjI1IC0xLjM5LDAgLTUuODYsMC4yOTcgLTcuNTUsNC4xNzIgMS41OCwwIDIuODgsMCA0LjI3LDEuMTg4IDEsMC44OSAxLjk4LDIuMTg3IDEuOTgsNC4wNzggMCwzLjA3OCAtMi42OCwzLjQ2OCAtMy42NywzLjQ2OCAtMi4yOCwwIC01LjU2LC0xLjU5MyAtNS41NiwtNi40NTMgMCwtNC45NjggNC4zNywtOC42NCAxMC41MywtOC42NCAxMC4yMywwIDIwLjQ1LDkuMDMxIDIzLjIzLDIwLjI2NSBsIDkuNTUsMzcuOTM4IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI0ODQuNTIsMzQzLjc2NiBjIDAsMTAuOTIyIC0xLjQ0LDI4LjczNCAtOS40OSw0NS40MDYgLTguNDgsMTcuMjM0IC0yMC4yNSwyNi41NzggLTIxLjg0LDI2LjU3OCAtMC41NiwwIC0xLjI4LC0wLjI5NyAtMS4yOCwtMS4xNTYgMCwtMC40MzggMCwtMC43MTkgMi40MywtMy4xNTYgMTQuMzYsLTE0LjUxNiAyMi40MSwtMzguMjE5IDIyLjQxLC02Ny41MTYgMCwtMjcuODc1IC02Ljc1LC01MS44NzUgLTIzLjQxLC02OC44MTMgLTEuNDMsLTEuMjk2IC0xLjQzLC0xLjU5MyAtMS40MywtMi4wMTUgMCwtMC44NiAwLjcyLC0xLjE1NiAxLjI4LC0xLjE1NiAxLjg3LDAgMTMuNjUsMTAuMzQzIDIwLjY5LDI0LjQyMSA3LjMyLDE0LjY1NyAxMC42NCwzMC4xNzIgMTAuNjQsNDcuNDA3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1NzkuODYsNDI4Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1NTAuMjgsMzUzLjU0NyBjIDAuNTgsMi4yOTcgMC41OCw0LjI5NyAwLjU4LDQuODc1IDAsOC4zMjggLTYuMTksMTIuOTM3IC0xMi42NCwxMi45MzcgLTE0LjUyLDAgLTIyLjI3LC0yMC45ODQgLTIyLjI3LC0yMS45ODQgMCwtMC43MTkgMC41NywtMS4yOTcgMS40MywtMS4yOTcgMS4xNSwwIDEuMjksMC41NzggMi4wMSwyLjAxNiA1Ljc1LDEzLjkzNyAxMi45NCwxOC4zOSAxOC4zOSwxOC4zOSAzLjAyLDAgNC42LC0xLjU3OCA0LjYsLTYuNjA5IDAsLTMuNDUzIC0wLjQzLC00Ljg5MSAtMSwtNy40NjkgbCAtMTMuNjYsLTU0LjE1NiBjIC0yLjcyLC0xMC42NDEgLTkuNDcsLTE4LjY4NyAtMTcuMzgsLTE4LjY4NyAtMC41NywwIC0zLjU5LDAgLTYuMzIsMS40MzcgMy40NSwwLjcxOSA2LjE4LDMuNDUzIDYuMTgsNi45MDYgMCwyLjI5NyAtMS43Myw0LjU5NCAtNC44OSw0LjU5NCAtMy43MywwIC03LjE4LC0zLjE3MiAtNy4xOCwtNy40NjkgMCwtNS44OSA2LjMyLC04LjM0MyAxMi4yMSwtOC4zNDMgOS45MSwwIDIyLjk5LDcuMzI4IDI2LjU4LDIxLjcwMyBsIDEzLjM2LDUzLjE1NiB6IG0gNS44OSw0NC4wOTQgYyAwLDMuNTkzIC0zLjAxLDQuNzM0IC00Ljc1LDQuNzM0IC0zLjg3LDAgLTcuMTcsLTMuNzM0IC03LjE3LC02Ljg5MSAwLC0yLjE1NiAxLjcyLC00LjczNCA0Ljg4LC00LjczNCAzLjMxLDAgNy4wNCwzLjE1NiA3LjA0LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1OTEuMTMsMzk2LjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNzkyLjk3LDM1NC41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxOSBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3OCAwLDIuNzM1IC0yLjQzLDIuNzM1IC00LjU5LDIuNzM1IGwgLTg0LjYxLDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTk0IDAsLTIuNzE5IDIuNDUsLTIuNzE5IDQuNjEsLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNTIwLjk3LDEwOS41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxODkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzgyIDAsMi43MzQzIC0yLjQzLDIuNzM0MyAtNC41OSwyLjczNDMgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTM3IDAsLTIuNzE4OCAyLjQ1LC0yLjcxODggNC42MSwtMi43MTg4IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxODU3LjY2LDExNi43MzQgYyAwLDkuMDQ3IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzIC02LjYxLC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU4LC0zLjI5NyAxLjQzLC0xLjI5NiA1LjE3LC01LjE3MSA1LjE3LC0xMi42NTYgMCwtNi4wMzExIC04LjYzLC0zOS42NDA1IC0yNS44NiwtMzkuNjQwNSAtOC43NywwIC0xMC40OSw3LjMyODEgLTEwLjQ5LDEyLjY0MDYgMCw3LjE4NzUgMy4zLDE3LjIzNDQgNy4xOSwyNy41Nzc5IDIuMyw1Ljg5MSAyLjg4LDcuMzI4IDIuODgsMTAuMjAzIDAsNi4wMzIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MyAtMTguNTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3LC0xLjI5NyAxLjU3LC0xLjI5NyAxLjMsMCAxLjQ0LDAuNTc4IDIuMDIsMi41OTQgMy40NSwxMi4zNDQgOS4wNSwxNy44MTIgMTQuNTEsMTcuODEyIDEuMjksMCAzLjc0LDAgMy43NCwtNC43NSAwLC0zLjczNCAtMS41OCwtNy44OSAtMy43NCwtMTMuMzU5IC02LjksLTE4LjM5MDYgLTYuOSwtMjIuODQzNyAtNi45LC0yNi4yODEyIDAsLTMuMTcxOSAwLjQ0LC05LjA0NjkgNC44OSwtMTMuMDc4MiA1LjE3LC00LjQ1MzEgMTIuMzYsLTQuNDUzMSAxMy42NCwtNC40NTMxIDIzLjg2LDAgMzIuMDUsNDYuOTg0NSAzMi4wNSw1NS4xNzE1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTg4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4OTAuMTMsMTYyLjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxODkzLjE3LDU3IGMgMC42MSwyLjU3ODEgMi44OSwxMS43MTg4IDkuODUsMTEuNzE4OCAwLjUsMCAyLjg3LDAgNC45NiwtMS4yODEzIC0yLjc4LC0wLjUgLTQuNzYsLTIuOTg0NCAtNC43NiwtNS4zNzUgMCwtMS41NzgxIDEuMDgsLTMuNDY4NyAzLjc2LC0zLjQ2ODcgMi4xOSwwIDUuMzYsMS43ODEyIDUuMzYsNS43NSAwLDUuMTcxOCAtNS44Niw2LjU2MjUgLTkuMjMsNi41NjI1IC01Ljc3LDAgLTkuMjMsLTUuMjY1NyAtMTAuNDIsLTcuNTQ2OSAtMi40OSw2LjU0NjkgLTcuODYsNy41NDY5IC0xMC43NCw3LjU0NjkgLTEwLjMyLDAgLTE2LC0xMi44MTI1IC0xNiwtMTUuMjk2OSAwLC0xIDEsLTEgMS4yMSwtMSAwLjc5LDAgMS4wOSwwLjIwMzEgMS4yOCwxLjA5MzcgMy4zOSwxMC41MzEzIDkuOTQsMTMuMDE1NyAxMy4zMSwxMy4wMTU3IDEuODksMCA1LjM4LC0wLjg5MDcgNS4zOCwtNi42NTYzIDAsLTMuMDc4MSAtMS42OSwtOS43MzQ0IC01LjM4LC0yMy42NDA2IC0xLjU4LC02LjE1NjMgLTUuMDYsLTEwLjMyODEgLTkuNDQsLTEwLjMyODEgLTAuNTksMCAtMi44NywwIC00Ljk3LDEuMjk2OCAyLjQ5LDAuNDg0NCA0LjY4LDIuNTc4MiA0LjY4LDUuMzU5NCAwLDIuNjg3NSAtMi4xOSwzLjQ2ODggLTMuNjgsMy40Njg4IC0yLjk4LDAgLTUuNDYsLTIuNTc4MiAtNS40NiwtNS43NSAwLC00LjU3ODIgNC45NiwtNi41NjI1IDkuMzQsLTYuNTYyNSA2LjU2LDAgMTAuMTIsNi45NTMxIDEwLjQ0LDcuNTQ2OCAxLjE4LC0zLjY3MTggNC43NiwtNy41NDY4IDEwLjcyLC03LjU0NjggMTAuMjMsMCAxNS44OSwxMi44MTI1IDE1Ljg5LDE1LjI5NjggMCwxIC0wLjg5LDEgLTEuMTksMSAtMC44OSwwIC0xLjEsLTAuNDA2MiAtMS4zLC0xLjA5MzcgLTMuMjYsLTEwLjYyNSAtMTAuMDMsLTEzLjAxNTYgLTEzLjIsLTEzLjAxNTYgLTMuODgsMCAtNS40NywzLjE3MTggLTUuNDcsNi41NjI1IDAsMi4xNzE4IDAuNTksNC4zNTkzIDEuNjksOC43MzQzIEwgMTg5My4xNyw1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTkyLjg2LDE4My43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTYyLjY2LDgzLjU0NjkgYyAwLDAuNzE4NyAtMC41OCwxLjI4MTIgLTEuNDQsMS4yODEyIC0xLjMsMCAtMS40NCwtMC40MjE4IC0yLjE2LC0yLjg1OTMgLTMuNzMsLTEzLjA3ODIgLTkuNjIsLTE3LjUzMTMgLTE0LjM2LC0xNy41MzEzIC0xLjczLDAgLTMuNzMsMC40Mzc1IC0zLjczLDQuNzM0NCAwLDMuODkwNiAxLjcyLDguMTg3NSAzLjMsMTIuNSBsIDEwLjA2LDI2LjcxOTEgYyAwLjQyLDEuMTU2IDEuNDQsMy43MzQgMS40NCw2LjQ2OCAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMDYyIDguOTEsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwtMC4xNTYgMy43NCwtNC43NSAwLC0zLjczNCAtMS44OCwtOC40NjggLTMuMDIsLTExLjYyNSBsIC0xMC4wNiwtMjYuNzM0IGMgLTAuODYsLTIuMjk2OSAtMS43MiwtNC41OTM3IC0xLjcyLC03LjE3MTkgMCwtNi40Njg3IDQuNDYsLTExLjY0MDYgMTEuMzUsLTExLjY0MDYgMTMuMjEsMCAxOC4zOSwyMC45Njg4IDE4LjM5LDIxLjk4NDQgeiBtIC0xLjE2LDY5LjA5NDEgYyAwLDIuMTU2IC0xLjcyLDQuNzM0IC00Ljg3LDQuNzM0IC0zLjMyLDAgLTcuMDUsLTMuMTU2IC03LjA1LC02Ljg5MSAwLC0zLjU5MyAzLjAxLC00LjczNCA0Ljc1LC00LjczNCAzLjg3LDAgNy4xNywzLjczNCA3LjE3LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTk2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5OTUuMTMsMTUxLjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDkxLjMxLDk2LjE4NzUgMzkuNjYsMCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3ODEgMCwyLjczNDQgLTIuNDMsMi43MzQ0IC00LjU5LDIuNzM0NCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3ODEgMCwtMi43MzQ0IDIuNDUsLTIuNzM0NCA0LjYxLC0yLjczNDQgbCAzOS42NCwwIDAsLTM5LjY1NjIgYyAwLC0yIDAsLTQuNTkzOCAyLjU5LC00LjU5MzggMi43MiwwIDIuNzIsMi40Mzc1IDIuNzIsNC41OTM4IGwgMCwzOS42NTYyIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjAwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIyNDEuNjYsMTE2LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMTEgLTguNjMsLTM5LjY0MDUgLTI1Ljg2LC0zOS42NDA1IC04Ljc3LDAgLTEwLjQ5LDcuMzI4MSAtMTAuNDksMTIuNjQwNiAwLDcuMTg3NSAzLjMsMTcuMjM0NCA3LjE5LDI3LjU3NzkgMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkwNiAtNi45LC0yMi44NDM3IC02LjksLTI2LjI4MTIgMCwtMy4xNzE5IDAuNDQsLTkuMDQ2OSA0Ljg5LC0xMy4wNzgyIDUuMTcsLTQuNDUzMSAxMi4zNiwtNC40NTMxIDEzLjY0LC00LjQ1MzEgMjMuODYsMCAzMi4wNSw0Ni45ODQ1IDMyLjA1LDU1LjE3MTUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjI3NC4xMywxNjIuMTg4IGMgMC41LDEuMTg3IDAuOSwyLjA3OCAwLjksMy4wNzggMCwyLjg3NSAtMi41OSw1LjI2NSAtNS42Nyw1LjI2NSAtMi43OCwwIC00LjU2LC0xLjg5IC01LjI3LC00LjQ2OCBsIC0xMS44MSwtNDMuNDA3IGMgMCwtMC4yMDMgLTAuNCwtMS4yOTcgLTAuNCwtMS4zOSAwLC0xLjA5NCAyLjU5LC0xLjc5NyAzLjM5LC0xLjc5NyAwLjU5LDAgMC42OCwwLjI5NyAxLjI4LDEuNTk0IGwgMTcuNTgsNDEuMTI1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjA0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIyOTIuMjgsNjQuODQzOCBjIDAuMzksMS4zOTA2IDAuMzksMS41OTM3IDAuMzksMi4yODEyIDAsMS43OTY5IC0xLjM5LDIuNjg3NSAtMi44NywyLjY4NzUgLTEsMCAtMi41OCwtMC41OTM3IC0zLjQ5LC0yLjA3ODEgLTAuMTgsLTAuNSAtMC45OCwtMy41NzgxIC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzgxIC0xLjM5LC01LjI2NTYgLTEuOTgsLTcuOTM3NSBsIC00LjQ3LC0xNy44OTA2IGMgLTAuMzksLTEuNDg0NCAtNC42NywtOC40Mzc1IC0xMS4yMiwtOC40Mzc1IC01LjA4LDAgLTYuMTYsNC4zNzUgLTYuMTYsOC4wNDY4IDAsNC41NjI1IDEuNjksMTAuNzM0NCA1LjA3LDE5LjQ2ODggMS41Nyw0LjA3ODEgMS45OCw1LjE3MTkgMS45OCw3LjE1NjIgMCw0LjQ2ODggLTMuMTksOC4xNDA3IC04LjE0LDguMTQwNyAtOS40NCwwIC0xMy4xMiwtMTQuNDA2MyAtMTMuMTIsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwMzEgMS41OCwxLjc5NjkgMi42OCw5LjMyODEgNi42NSwxMi4zMTI1IDEwLjAzLDEyLjMxMjUgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MTkgMCwtMi40ODQ0IC0wLjk4LC01LjA2MjUgLTEuNjksLTYuOTUzMSAtMy45NiwtMTAuNTMxMyAtNS43NSwtMTYuMjAzMiAtNS43NSwtMjAuODU5NCAwLC04Ljg0MzggNi4yNSwtMTEuODI4MSAxMi4xMSwtMTEuODI4MSAzLjg4LDAgNy4yNSwxLjY4NzUgMTAuMDQsNC40Njg3IC0xLjI5LC01LjE1NjIgLTIuNDksLTEwLjAzMTIgLTYuNDYsLTE1LjI5NjkgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI0OTk3IC0xMC45MiwtNi4yNDk5NyAtMS4zOSwwIC01Ljg2LDAuMjk2ODcgLTcuNTUsNC4xNzE4NyAxLjU4LDAgMi44OCwwIDQuMjcsMS4xODc1IDEsMC44OTA2IDEuOTgsMi4xODc1IDEuOTgsNC4wNzgxIDAsMy4wNzgyIC0yLjY4LDMuNDY4OCAtMy42NywzLjQ2ODggLTIuMjgsMCAtNS41NiwtMS41OTM4IC01LjU2LC02LjQ1MzEgMCwtNC45Njg4IDQuMzcsLTguNjQwNjcgMTAuNTMsLTguNjQwNjcgMTAuMjMsMCAyMC40NSw5LjAzMTI3IDIzLjIzLDIwLjI2NTY3IGwgOS41NSwzNy45Mzc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjA2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzODAuODYsMTgzLjc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjA4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzNTAuMjgsMTA4LjU0NyBjIDAuNTgsMi4yOTcgMC41OCw0LjI5NyAwLjU4LDQuODc1IDAsOC4zMjggLTYuMTksMTIuOTM3IC0xMi42NCwxMi45MzcgLTE0LjUyLDAgLTIyLjI3LC0yMC45ODQgLTIyLjI3LC0yMS45ODQgMCwtMC43MTkgMC41NywtMS4yOTcgMS40MywtMS4yOTcgMS4xNSwwIDEuMjksMC41NzggMi4wMSwyLjAxNiA1Ljc1LDEzLjkzNyAxMi45NCwxOC4zOSAxOC4zOSwxOC4zOSAzLjAyLDAgNC42LC0xLjU3OCA0LjYsLTYuNjA5IDAsLTMuNDUzIC0wLjQzLC00Ljg5MSAtMSwtNy40NjkgTCAyMzI3LjcyLDU1LjI1IGMgLTIuNzIsLTEwLjY0MDYgLTkuNDcsLTE4LjY4NzUgLTE3LjM4LC0xOC42ODc1IC0wLjU3LDAgLTMuNTksMCAtNi4zMiwxLjQzNzUgMy40NSwwLjcxODggNi4xOCwzLjQ1MzEgNi4xOCw2LjkwNjMgMCwyLjI5NjggLTEuNzMsNC41OTM3IC00Ljg5LDQuNTkzNyAtMy43MywwIC03LjE4LC0zLjE3MTkgLTcuMTgsLTcuNDY4NyAwLC01Ljg5MDcgNi4zMiwtOC4zNDM4IDEyLjIxLC04LjM0MzggOS45MSwwIDIyLjk5LDcuMzI4MSAyNi41OCwyMS43MDMxIGwgMTMuMzYsNTMuMTU2NCB6IG0gNS44OSw0NC4wOTQgYyAwLDMuNTkzIC0zLjAxLDQuNzM0IC00Ljc1LDQuNzM0IC0zLjg3LDAgLTcuMTcsLTMuNzM0IC03LjE3LC02Ljg5MSAwLC0yLjE1NiAxLjcyLC00LjczNCA0Ljg4LC00LjczNCAzLjMxLDAgNy4wNCwzLjE1NiA3LjA0LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjEwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzOTEuMTMsMTUxLjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIxMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNDI3LjAyLDYyLjQyMTkgYyAwLDguMzI4MSAtMi43NCwxNC41MTU2IC04LjYzLDE0LjUxNTYgLTQuNTksMCAtNi44OSwtMy43MzQ0IC02Ljg5LC02Ljg5MDYgMCwtMy4xNzE5IDIuMTYsLTcuMDQ2OSA3LjAzLC03LjA0NjkgMS44OCwwIDMuNDUsMC41NzgxIDQuNzUsMS44NzUgMC4yOCwwLjI4MTMgMC40MiwwLjI4MTMgMC41OCwwLjI4MTMgMC4yOCwwIDAuMjgsLTIuMDE1NyAwLjI4LC0yLjczNDQgMCwtNC43MzQ0IC0wLjg2LC0xNC4wNzgxIC05LjE5LC0yMy40MDYzIC0xLjU5LC0xLjczNDMgLTEuNTksLTIuMDE1NiAtMS41OSwtMi4zMTI1IDAsLTAuNzAzMSAwLjcyLC0xLjQyMTggMS40NCwtMS40MjE4IDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQwNiIgLz48L2c+PC9nPjwvc3ZnPg==)
![≤ft{\begin{matrix}b_{11}v_x&+&b_{21}v_y&=& v'_x,\\[2mm]b_{12}v_x&+&b_{22}v_y&=& v'_y.\end{matrix}\right.](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDE0NiA0NCIKICAgaGVpZ2h0PSI0NCIKICAgd2lkdGg9IjE0NiIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDQ0KSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDcuNzk2OSwxNjMuNTQ3IGMgMCwxNS43OTcgLTEwLjkyMTksNDAuMDc4IC0zNS45MjE5LDUyLjcxOSAxNS41MTU2LDguMzI4IDM0LjA0NjksMjUuMTQgMzUuNzY1Niw1MiBsIDAuMTU2MywwLjg1OSAwLDk5LjU2MyBjIDAsMTEuNzY1IDAsMTQuMzU5IDEuMTQwNiwxOS44MTIgMi41OTM4LDExLjUgOS40ODQ0LDI1LjcxOSAyNy43MzQ0LDM2LjUgMS4xNDA2LDAuNzE5IDEuMjgxMiwwLjg1OSAxLjI4MTIsMy40MzggMCwzLjE3MSAtMC4xNDA2LDMuMzEyIC0zLjI5NjgsMy4zMTIgLTIuNTkzOCwwIC0yLjg3NSwwIC02Ljc1LC0yLjI5NyAtMzIuMTg3NSwtMTguMjUgLTM0LjA0NjksLTQ0Ljk2OSAtMzQuMDQ2OSwtNTAgbCAwLC0xMDIuMTQgYyAwLC0xMC4zNDQgMCwtMjEuOTg1IC03LjQ2ODgsLTM1LjE4OCAtNi42MDkzLC0xMS43ODEgLTE0LjM3NSwtMTcuNjcyIC0yMC41NDY4NSwtMjEuODQ0IC0yLjAxNTYyLC0xLjI5NyAtMi4xNTYyNSwtMS40MzcgLTIuMTU2MjUsLTMuODc1IDAsLTIuNTkzIDAuMTQwNjMsLTIuNzM0IDEuMjk2ODgsLTMuNDUzIDEyLjIwMzEyLC04LjA0NyAyNS4yODEyMiwtMjAuODI4IDI4LjQzNzUyLC00NC4yNSAwLjQzNzUsLTMuMTU2IDAuNDM3NSwtMy40MzcgMC40Mzc1LC01LjE1NiBsIDAsLTExMC4zNDM5IGMgMCwtMTEuNjI1IDcuMTcxOSwtMzUuNzY1NiAzNC45MDYyLC01MC40MjE4NSAzLjI5NjksLTEuODU5Mzc1IDMuNTkzOCwtMS44NTkzNzUgNS44OTA3LC0xLjg1OTM3NSAzLjE1NjIsMCAzLjI5NjgsMC4xNDA2MjUgMy4yOTY4LDMuMjk2ODc1IDAsMi41OTM3NSAtMC4xNDA2LDIuNzM0MzggLTAuNzE4NywzLjAxNTYzIEMgNzEuMDYyNSwxMS4xMjUgNTIuMjUsMjIuNDY4OCA0OC4zNTk0LDQ3LjQ2ODggYyAtMC41NjI1LDMuNzM0MyAtMC41NjI1LDQuMDE1NiAtMC41NjI1LDUuODkwNiBsIDAsMTEwLjE4NzYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzEuMTg4LDM5NC4xMDkgYyAwLjE0LDAuNTc5IDAuNDIxLDEuNDM4IDAuNDIxLDIuMTU3IDAsMS40MzcgLTEuNDM3LDEuNDM3IC0xLjcxOCwxLjQzNyAtMC4xNDEsMCAtNS4zMTMsLTAuNDM3IC03LjkwNywtMC43MTkgLTIuNDM3LC0wLjE1NiAtNC41OTMsLTAuNDM3IC03LjE3MSwtMC41NzggLTMuNDU0LC0wLjI4MSAtNC40NTQsLTAuNDM3IC00LjQ1NCwtMy4wMTUgMCwtMS40MzggMS40MzgsLTEuNDM4IDIuODc1LC0xLjQzOCA3LjMxMywwIDcuMzEzLC0xLjI5NyA3LjMxMywtMi43MzQgMCwtMSAtMS4xNDEsLTUuMTcyIC0xLjcxOSwtNy43NSBsIC0zLjQ1MywtMTMuNzk3IGMgLTEuNDIyLC01Ljc1IC05LjYyNSwtMzguMzU5IC0xMC4xODcsLTQwLjkzOCAtMC43MTksLTMuNTkzIC0wLjcxOSwtNi4wMzEgLTAuNzE5LC03LjkwNiAwLC0xNC42NTYgOC4xODcsLTIyLjI2NSAxNy41MTUsLTIyLjI2NSAxNi42NzIsMCAzMy45MDcsMjEuNDA2IDMzLjkwNyw0Mi4yMzQgMCwxMy4yMTkgLTcuNDY5LDIyLjU2MiAtMTguMjM1LDIyLjU2MiAtNy40ODQsMCAtMTQuMjM0LC02LjE4NyAtMTYuOTUzLC05LjA2MiBsIDEwLjQ4NSw0MS44MTIgeiBtIC05LjA0NywtOTQuNjcxIGMgLTQuNjEsMCAtOS42MjUsMy40NTMgLTkuNjI1LDE0LjY1NiAwLDQuNzM0IDAuNDIyLDcuNDY5IDMuMDE1LDE3LjUxNSAwLjQyMiwxLjg3NSAyLjcxOSwxMS4wNjMgMy4yOTcsMTIuOTM4IDAuMjk3LDEuMTQxIDguNzY2LDEzLjkzNyAxOC41MzEsMTMuOTM3IDYuMzI5LDAgOS4yMDQsLTYuMzI4IDkuMjA0LC0xMy43OTYgMCwtNi44OTEgLTQuMDMyLC0yMy4xMjUgLTcuNjI1LC0zMC41OTQgLTMuNTk0LC03Ljc2NiAtMTAuMTg4LC0xNC42NTYgLTE2Ljc5NywtMTQuNjU2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTg3LjIwMywzMzkuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjM3LjIwMywzMzkuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzI3LjY1NiwzNTEuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzNjQuMTcyLDMwNiBjIDAuNjA5LDIuNTc4IDIuODkxLDExLjcxOSA5Ljg0NCwxMS43MTkgMC41LDAgMi44NzUsMCA0Ljk2OCwtMS4yODEgLTIuNzgxLC0wLjUgLTQuNzY1LC0yLjk4NSAtNC43NjUsLTUuMzc1IDAsLTEuNTc5IDEuMDc4LC0zLjQ2OSAzLjc2NSwtMy40NjkgMi4xODgsMCA1LjM2LDEuNzgxIDUuMzYsNS43NSAwLDUuMTcyIC01Ljg2LDYuNTYyIC05LjIzNSw2LjU2MiAtNS43NjUsMCAtOS4yMzQsLTUuMjY1IC0xMC40MjEsLTcuNTQ3IC0yLjQ4NSw2LjU0NyAtNy44Niw3LjU0NyAtMTAuNzM1LDcuNTQ3IC0xMC4zMjgsMCAtMTYsLTEyLjgxMiAtMTYsLTE1LjI5NyAwLC0xIDEsLTEgMS4yMDMsLTEgMC43OTcsMCAxLjA5NCwwLjIwNCAxLjI4MiwxLjA5NCAzLjM5LDEwLjUzMSA5LjkzNywxMy4wMTYgMTMuMzEyLDEzLjAxNiAxLjg5MSwwIDUuMzc1LC0wLjg5MSA1LjM3NSwtNi42NTYgMCwtMy4wNzkgLTEuNjg3LC05LjczNSAtNS4zNzUsLTIzLjY0MSAtMS41NzgsLTYuMTU2IC01LjA2MiwtMTAuMzI4IC05LjQzNywtMTAuMzI4IC0wLjU5NCwwIC0yLjg3NSwwIC00Ljk2OSwxLjI5NyAyLjQ4NCwwLjQ4NCA0LjY3MiwyLjU3OCA0LjY3Miw1LjM1OSAwLDIuNjg4IC0yLjE4OCwzLjQ2OSAtMy42NzIsMy40NjkgLTIuOTg1LDAgLTUuNDY5LC0yLjU3OCAtNS40NjksLTUuNzUgMCwtNC41NzggNC45NjksLTYuNTYzIDkuMzQ0LC02LjU2MyA2LjU2MiwwIDEwLjEyNSw2Ljk1MyAxMC40MzcsNy41NDcgMS4xODgsLTMuNjcyIDQuNzY2LC03LjU0NyAxMC43MTksLTcuNTQ3IDEwLjIzNCwwIDE1Ljg5MSwxMi44MTMgMTUuODkxLDE1LjI5NyAwLDEgLTAuODkxLDEgLTEuMTg4LDEgLTAuODksMCAtMS4wOTQsLTAuNDA2IC0xLjI5NywtMS4wOTQgLTMuMjY1LC0xMC42MjUgLTEwLjAzMSwtMTMuMDE1IC0xMy4yMDMsLTEzLjAxNSAtMy44NzUsMCAtNS40NjksMy4xNzIgLTUuNDY5LDYuNTYyIDAsMi4xNzIgMC41OTQsNC4zNiAxLjY4OCw4LjczNSBMIDM2NC4xNzIsMzA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTQ5LjMxMywzMzEuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5NCwtNC41OTMgMi43MTksMCAyLjcxOSwyLjQzNyAyLjcxOSw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzMzLjE4OCwzOTQuMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NSAtOS42MjUsLTM4LjM1OSAtMTAuMTg3LC00MC45MzggLTAuNzE5LC0zLjU5MyAtMC43MTksLTYuMDMxIC0wLjcxOSwtNy45MDYgMCwtMTQuNjU2IDguMTg3LC0yMi4yNjUgMTcuNTE1LC0yMi4yNjUgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNiAzMy45MDcsNDIuMjM0IDAsMTMuMjE5IC03LjQ2OSwyMi41NjIgLTE4LjIzNSwyMi41NjIgLTcuNDg0LDAgLTE0LjIzNCwtNi4xODcgLTE2Ljk1MywtOS4wNjIgbCAxMC40ODUsNDEuODEyIHogbSAtOS4wNDcsLTk0LjY3MSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzIC05LjYyNSwxNC42NTYgMCw0LjczNCAwLjQyMiw3LjQ2OSAzLjAxNSwxNy41MTUgMC40MjIsMS44NzUgMi43MTksMTEuMDYzIDMuMjk3LDEyLjkzOCAwLjI5NywxLjE0MSA4Ljc2NiwxMy45MzcgMTguNTMxLDEzLjkzNyA2LjMyOSwwIDkuMjA0LC02LjMyOCA5LjIwNCwtMTMuNzk2IDAsLTYuODkxIC00LjAzMiwtMjMuMTI1IC03LjYyNSwtMzAuNTk0IC0zLjU5NCwtNy43NjYgLTEwLjE4OCwtMTQuNjU2IC0xNi43OTcsLTE0LjY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDc3Mi42MDksMjgzLjY1NiAxMC41MzIsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDY4LDE5LjA3OCAyMS40NjgsMjkuMDE2IDAsMTEuMzI4IC04Ljk1MywxOS4yNjUgLTIxLjA2MiwxOS4yNjUgLTExLjIzNCwwIC0xOC41NzgsLTkuMTQgLTE4LjU3OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTY5LC01LjU2MyA1LjI2NSwtNS41NjMgMS42ODgsMCA1LjE1NywxLjIwNCA1LjE1Nyw1LjI2NiAwLDIuNTk0IC0xLjc4Miw1LjE3MiAtNS4yNjYsNS4xNzIgLTAuNzgxLDAgLTAuOTg0LDAgLTEuMjgxLC0wLjA5NCAyLjI4MSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MDYsMTAuMTI1IDkuMDQ3LDAgMTMuMzEzLC04LjA0NyAxMy4zMTMsLTE2LjE4NyAwLC03Ljk1MyAtNC45NjksLTE1Ljc5NyAtMTAuNDM4LC0yMS45NTMgbCAtMTkuMDYyLC0yMS4yNjYgYyAtMS4wOTQsLTEuMDk0IC0xLjA5NCwtMS4yODEgLTEuMDk0LC0zLjY3MiBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MSAtMi40ODQsMCBjIC0wLjUsLTIuOTg0IC0xLjIwMywtNy4zNDMgLTIuMTg3LC04Ljg0MyAtMC43MDQsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40MzgsLTAuNzgyIGwgLTE3Ljg5MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODQwLjIwMywzMzkuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTMwLjY1NiwzNTEuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5ODEuMjgxLDMxMy44NDQgYyAwLjM5MSwxLjM5IDAuMzkxLDEuNTk0IDAuMzkxLDIuMjgxIDAsMS43OTcgLTEuMzkxLDIuNjg4IC0yLjg3NSwyLjY4OCAtMSwwIC0yLjU3OCwtMC41OTQgLTMuNDg0LC0yLjA3OSAtMC4xODgsLTAuNSAtMC45ODUsLTMuNTc4IC0xLjM5MSwtNS4zNzUgLTAuNjg4LC0yLjU3OCAtMS4zOTEsLTUuMjY1IC0xLjk4NCwtNy45MzcgbCAtNC40NjksLTE3Ljg5MSBjIC0wLjM5MSwtMS40ODQgLTQuNjcyLC04LjQzNyAtMTEuMjE5LC04LjQzNyAtNS4wNzgsMCAtNi4xNTYsNC4zNzUgLTYuMTU2LDguMDQ3IDAsNC41NjIgMS42ODcsMTAuNzM0IDUuMDYyLDE5LjQ2OCAxLjU3OCw0LjA3OSAxLjk4NSw1LjE3MiAxLjk4NSw3LjE1NyAwLDQuNDY4IC0zLjE4OCw4LjE0IC04LjE0MSw4LjE0IC05LjQzNywwIC0xMy4xMjUsLTE0LjQwNiAtMTMuMTI1LC0xNS4yOTcgMCwtMSAxLC0xIDEuMjAzLC0xIDAuOTg1LDAgMS4wOTQsMC4yMDQgMS41NzgsMS43OTcgMi42ODgsOS4zMjggNi42NTcsMTIuMzEzIDEwLjAzMiwxMi4zMTMgMC43OTYsMCAyLjQ4NCwwIDIuNDg0LC0zLjE3MiAwLC0yLjQ4NCAtMC45ODQsLTUuMDYzIC0xLjY4OCwtNi45NTMgLTMuOTY4LC0xMC41MzEgLTUuNzUsLTE2LjIwMyAtNS43NSwtMjAuODYgMCwtOC44NDMgNi4yNSwtMTEuODI4IDEyLjExLC0xMS44MjggMy44NzUsMCA3LjI1LDEuNjg4IDEwLjAzMSw0LjQ2OSAtMS4yODEsLTUuMTU2IC0yLjQ4NCwtMTAuMDMxIC02LjQ1MywtMTUuMjk3IC0yLjU3OCwtMy4zNzUgLTYuMzU5LC02LjI1IC0xMC45MjIsLTYuMjUgLTEuMzkxLDAgLTUuODU5LDAuMjk3IC03LjU0Nyw0LjE3MiAxLjU3OCwwIDIuODc1LDAgNC4yNjYsMS4xODggMSwwLjg5IDEuOTg0LDIuMTg3IDEuOTg0LDQuMDc4IDAsMy4wNzggLTIuNjg3LDMuNDY4IC0zLjY3MiwzLjQ2OCAtMi4yODEsMCAtNS41NjIsLTEuNTkzIC01LjU2MiwtNi40NTMgMCwtNC45NjggNC4zNzUsLTguNjQgMTAuNTMxLC04LjY0IDEwLjIzNCwwIDIwLjQ1Myw5LjAzMSAyMy4yMzQsMjAuMjY1IGwgOS41NDcsMzcuOTM4IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE4Ni45NywzNDQuNTQ3IGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCA4NC42MSwwIHogbSAwLC0yNi43MTkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNSAtMi40MywyLjczNSAtNC41OSwyLjczNSBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU5NCAwLC0yLjcxOSAyLjQ1LC0yLjcxOSA0LjYxLC0yLjcxOSBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzY0LjY2LDM1MS43MzQgYyAwLDkuMDQ3IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzIC02LjYxLC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU4LC0zLjI5NyAxLjQzLC0xLjI5NiA1LjE3LC01LjE3MSA1LjE3LC0xMi42NTYgMCwtNi4wMzEgLTguNjMsLTM5LjY0IC0yNS44NiwtMzkuNjQgLTguNzcsMCAtMTAuNDksNy4zMjggLTEwLjQ5LDEyLjY0IDAsNy4xODggMy4zLDE3LjIzNSA3LjE5LDI3LjU3OCAyLjMsNS44OTEgMi44OCw3LjMyOCAyLjg4LDEwLjIwMyAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMzQ0IDkuMDUsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTEgLTYuOSwtMjIuODQ0IC02LjksLTI2LjI4MSAwLC0zLjE3MiAwLjQ0LC05LjA0NyA0Ljg5LC0xMy4wNzggNS4xNywtNC40NTMgMTIuMzYsLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA1LDQ2Ljk4NCAzMi4wNSw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzk3LjEzLDM5Ni4xODggYyAwLjUsMS4xODcgMC45LDIuMDc4IDAuOSwzLjA3OCAwLDIuODc1IC0yLjU5LDUuMjY1IC01LjY3LDUuMjY1IC0yLjc4LDAgLTQuNTYsLTEuODkgLTUuMjcsLTQuNDY4IGwgLTExLjgxLC00My40MDcgYyAwLC0wLjIwMyAtMC40LC0xLjI5NyAtMC40LC0xLjM5IDAsLTEuMDk0IDIuNTksLTEuNzk3IDMuMzksLTEuNzk3IDAuNTksMCAwLjY4LDAuMjk3IDEuMjgsMS41OTQgbCAxNy41OCw0MS4xMjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNDAxLjE3LDI5MiBjIDAuNjEsMi41NzggMi44OSwxMS43MTkgOS44NSwxMS43MTkgMC41LDAgMi44NywwIDQuOTYsLTEuMjgxIC0yLjc4LC0wLjUgLTQuNzYsLTIuOTg1IC00Ljc2LC01LjM3NSAwLC0xLjU3OSAxLjA4LC0zLjQ2OSAzLjc2LC0zLjQ2OSAyLjE5LDAgNS4zNiwxLjc4MSA1LjM2LDUuNzUgMCw1LjE3MiAtNS44Niw2LjU2MiAtOS4yMyw2LjU2MiAtNS43NywwIC05LjIzLC01LjI2NSAtMTAuNDIsLTcuNTQ3IC0yLjQ5LDYuNTQ3IC03Ljg2LDcuNTQ3IC0xMC43NCw3LjU0NyAtMTAuMzIsMCAtMTYsLTEyLjgxMiAtMTYsLTE1LjI5NyAwLC0xIDEsLTEgMS4yMSwtMSAwLjc5LDAgMS4wOSwwLjIwNCAxLjI4LDEuMDk0IDMuMzksMTAuNTMxIDkuOTQsMTMuMDE2IDEzLjMxLDEzLjAxNiAxLjg5LDAgNS4zOCwtMC44OTEgNS4zOCwtNi42NTYgMCwtMy4wNzkgLTEuNjksLTkuNzM1IC01LjM4LC0yMy42NDEgLTEuNTgsLTYuMTU2IC01LjA2LC0xMC4zMjggLTkuNDQsLTEwLjMyOCAtMC41OSwwIC0yLjg3LDAgLTQuOTcsMS4yOTcgMi40OSwwLjQ4NCA0LjY4LDIuNTc4IDQuNjgsNS4zNTkgMCwyLjY4OCAtMi4xOSwzLjQ2OSAtMy42OCwzLjQ2OSAtMi45OCwwIC01LjQ2LC0yLjU3OCAtNS40NiwtNS43NSAwLC00LjU3OCA0Ljk2LC02LjU2MyA5LjM0LC02LjU2MyA2LjU2LDAgMTAuMTIsNi45NTMgMTAuNDQsNy41NDcgMS4xOCwtMy42NzIgNC43NiwtNy41NDcgMTAuNzIsLTcuNTQ3IDEwLjIzLDAgMTUuODksMTIuODEzIDE1Ljg5LDE1LjI5NyAwLDEgLTAuODksMSAtMS4xOSwxIC0wLjg5LDAgLTEuMSwtMC40MDYgLTEuMywtMS4wOTQgLTMuMjYsLTEwLjYyNSAtMTAuMDMsLTEzLjAxNSAtMTMuMiwtMTMuMDE1IC0zLjg4LDAgLTUuNDcsMy4xNzIgLTUuNDcsNi41NjIgMCwyLjE3MiAwLjU5LDQuMzYgMS42OSw4LjczNSBsIDMuMzcsMTMuNjA5IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ1Ny4wMiwyOTcuNDIyIGMgMCw4LjMyOCAtMi43NCwxNC41MTYgLTguNjMsMTQuNTE2IC00LjU5LDAgLTYuODksLTMuNzM1IC02Ljg5LC02Ljg5MSAwLC0zLjE3MiAyLjE2LC03LjA0NyA3LjAzLC03LjA0NyAxLjg4LDAgMy40NSwwLjU3OCA0Ljc1LDEuODc1IDAuMjgsMC4yODEgMC40MiwwLjI4MSAwLjU4LDAuMjgxIDAuMjgsMCAwLjI4LC0yLjAxNSAwLjI4LC0yLjczNCAwLC00LjczNCAtMC44NiwtMTQuMDc4IC05LjE5LC0yMy40MDYgLTEuNTksLTEuNzM1IC0xLjU5LC0yLjAxNiAtMS41OSwtMi4zMTMgMCwtMC43MDMgMC43MiwtMS40MjIgMS40NCwtMS40MjIgMS4xNSwwIDEyLjIyLDEwLjYyNSAxMi4yMiwyNy4xNDEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzEuMTg4LDE2OC4xMDkgYyAwLjE0LDAuNTc5IDAuNDIxLDEuNDM4IDAuNDIxLDIuMTU3IDAsMS40MzcgLTEuNDM3LDEuNDM3IC0xLjcxOCwxLjQzNyAtMC4xNDEsMCAtNS4zMTMsLTAuNDM3IC03LjkwNywtMC43MTkgLTIuNDM3LC0wLjE1NiAtNC41OTMsLTAuNDM3IC03LjE3MSwtMC41NzggLTMuNDU0LC0wLjI4MSAtNC40NTQsLTAuNDM3IC00LjQ1NCwtMy4wMTUgMCwtMS40MzggMS40MzgsLTEuNDM4IDIuODc1LC0xLjQzOCA3LjMxMywwIDcuMzEzLC0xLjI5NyA3LjMxMywtMi43MzQgMCwtMSAtMS4xNDEsLTUuMTcyIC0xLjcxOSwtNy43NSBsIC0zLjQ1MywtMTMuNzk3IGMgLTEuNDIyLC01Ljc1IC05LjYyNSwtMzguMzU5IC0xMC4xODcsLTQwLjkzOCAtMC43MTksLTMuNTkzNCAtMC43MTksLTYuMDMwOSAtMC43MTksLTcuOTA1OSAwLC0xNC42NTYyIDguMTg3LC0yMi4yNjU2IDE3LjUxNSwtMjIuMjY1NiAxNi42NzIsMCAzMy45MDcsMjEuNDA2MyAzMy45MDcsNDIuMjM0NSAwLDEzLjIxOSAtNy40NjksMjIuNTYyIC0xOC4yMzUsMjIuNTYyIC03LjQ4NCwwIC0xNC4yMzQsLTYuMTg3IC0xNi45NTMsLTkuMDYyIGwgMTAuNDg1LDQxLjgxMiB6IG0gLTkuMDQ3LC05NC42NzE1IGMgLTQuNjEsMCAtOS42MjUsMy40NTMxIC05LjYyNSwxNC42NTYzIDAsNC43MzQzIDAuNDIyLDcuNDY4NyAzLjAxNSwxNy41MTUyIDAuNDIyLDEuODc1IDIuNzE5LDExLjA2MyAzLjI5NywxMi45MzggMC4yOTcsMS4xNDEgOC43NjYsMTMuOTM3IDE4LjUzMSwxMy45MzcgNi4zMjksMCA5LjIwNCwtNi4zMjggOS4yMDQsLTEzLjc5NiAwLC02Ljg5MSAtNC4wMzIsLTIzLjEyNTUgLTcuNjI1LC0zMC41OTQyIC0zLjU5NCwtNy43NjU3IC0xMC4xODgsLTE0LjY1NjMgLTE2Ljc5NywtMTQuNjU2MyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4Ny4yMDMsMTE0LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MzIgYyAwLC0zLjU3ODIgLTAuMjk2LC00Ljc2NTcgLTkuMjUsLTQuNzY1NyBsIC0zLjE3MSwwIDAsLTMuMDc4MSBjIDMuNDY4LDAuMjk2OSAxMi4xMjUsMC4yOTY5IDE2LjA5MywwLjI5NjkgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTY5IGwgMCwzLjA3ODEgLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTM4IC05LjIzNSw0Ljc2NTcgbCAwLDU1LjczNDIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjAuNjA5LDU4LjY1NjMgMTAuNTMyLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDY4LDE5LjA3ODEgMjEuNDY4LDI5LjAxNTYgMCwxMS4zMjg0IC04Ljk1MywxOS4yNjU0IC0yMS4wNjIsMTkuMjY1NCAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNCAtMTguNTc4LC0xNy45ODQxIDAsLTUuNTYyNSA0Ljk2OSwtNS41NjI1IDUuMjY1LC01LjU2MjUgMS42ODgsMCA1LjE1NywxLjIwMzEgNS4xNTcsNS4yNjU2IDAsMi41OTQgLTEuNzgyLDUuMTcyIC01LjI2Niw1LjE3MiAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDk0IDIuMjgxLDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ3IDEzLjMxMywtMTYuMTg3NCAwLC03Ljk1MzEgLTQuOTY5LC0xNS43OTY4IC0xMC40MzgsLTIxLjk1MzEgTCAyMTQuMDYzLDU0LjY3MTkgQyAyMTIuOTY5LDUzLjU3ODEgMjEyLjk2OSw1My4zOTA2IDIxMi45NjksNTEgbCAzNi44NTksMCAyLjc4MSwxNy4yODEzIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIwMywtNy4zNDM4IC0yLjE4NywtOC44NDM4IC0wLjcwNCwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDM4LC0wLjc4MTIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzMjcuNjU2LDEyNS43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0MDUgLTI1Ljg1OSwtMzkuNjQwNSAtOC43NjYsMCAtMTAuNDg1LDcuMzI4MSAtMTAuNDg1LDEyLjY0MDYgMCw3LjE4NzUgMy4yOTcsMTcuMjM0OSA3LjE4OCwyNy41Nzc5IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MDYgLTYuOTA2LC0yMi44NDM3IC02LjkwNiwtMjYuMjgxMiAwLC0zLjE3MTkgMC40MzgsLTkuMDQ2OSA0Ljg5MSwtMTMuMDc4MiA1LjE3MiwtNC40NTMxIDEyLjM1OSwtNC40NTMxIDEzLjY0LC00LjQ1MzEgMjMuODYsMCAzMi4wNDcsNDYuOTg0NSAzMi4wNDcsNTUuMTcxNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDM2NC4xNzIsODEgYyAwLjYwOSwyLjU3ODEgMi44OTEsMTEuNzE4OCA5Ljg0NCwxMS43MTg4IDAuNSwwIDIuODc1LDAgNC45NjgsLTEuMjgxMyAtMi43ODEsLTAuNSAtNC43NjUsLTIuOTg0NCAtNC43NjUsLTUuMzc1IDAsLTEuNTc4MSAxLjA3OCwtMy40Njg3IDMuNzY1LC0zLjQ2ODcgMi4xODgsMCA1LjM2LDEuNzgxMiA1LjM2LDUuNzUgMCw1LjE3MTggLTUuODYsNi41NjI1IC05LjIzNSw2LjU2MjUgLTUuNzY1LDAgLTkuMjM0LC01LjI2NTcgLTEwLjQyMSwtNy41NDY5IC0yLjQ4NSw2LjU0NjkgLTcuODYsNy41NDY5IC0xMC43MzUsNy41NDY5IC0xMC4zMjgsMCAtMTYsLTEyLjgxMjUgLTE2LC0xNS4yOTY5IDAsLTEgMSwtMSAxLjIwMywtMSAwLjc5NywwIDEuMDk0LDAuMjAzMSAxLjI4MiwxLjA5MzcgMy4zOSwxMC41MzEzIDkuOTM3LDEzLjAxNTcgMTMuMzEyLDEzLjAxNTcgMS44OTEsMCA1LjM3NSwtMC44OTA3IDUuMzc1LC02LjY1NjMgMCwtMy4wNzgxIC0xLjY4NywtOS43MzQ0IC01LjM3NSwtMjMuNjQwNiAtMS41NzgsLTYuMTU2MyAtNS4wNjIsLTEwLjMyODEgLTkuNDM3LC0xMC4zMjgxIC0wLjU5NCwwIC0yLjg3NSwwIC00Ljk2OSwxLjI5NjggMi40ODQsMC40ODQ0IDQuNjcyLDIuNTc4MiA0LjY3Miw1LjM1OTQgMCwyLjY4NzUgLTIuMTg4LDMuNDY4OCAtMy42NzIsMy40Njg4IC0yLjk4NSwwIC01LjQ2OSwtMi41NzgyIC01LjQ2OSwtNS43NSAwLC00LjU3ODIgNC45NjksLTYuNTYyNSA5LjM0NCwtNi41NjI1IDYuNTYyLDAgMTAuMTI1LDYuOTUzMSAxMC40MzcsNy41NDY4IDEuMTg4LC0zLjY3MTggNC43NjYsLTcuNTQ2OCAxMC43MTksLTcuNTQ2OCAxMC4yMzQsMCAxNS44OTEsMTIuODEyNSAxNS44OTEsMTUuMjk2OCAwLDEgLTAuODkxLDEgLTEuMTg4LDEgLTAuODksMCAtMS4wOTQsLTAuNDA2MiAtMS4yOTcsLTEuMDkzNyAtMy4yNjUsLTEwLjYyNSAtMTAuMDMxLC0xMy4wMTU2IC0xMy4yMDMsLTEzLjAxNTYgLTMuODc1LDAgLTUuNDY5LDMuMTcxOCAtNS40NjksNi41NjI1IDAsMi4xNzE4IDAuNTk0LDQuMzU5MyAxLjY4OCw4LjczNDMgTCAzNjQuMTcyLDgxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTQ5LjMxMywxMDUuMTg4IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC0zOS42NTYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU3OSw0LjU5NCAtMi43MzQsMCAtMi43MzQsLTIuNDUzIC0yLjczNCwtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgMzkuNjQxLDAgMCwtMzkuNjU2NyBjIDAsLTIgMCwtNC41OTM4IDIuNTk0LC00LjU5MzggMi43MTksMCAyLjcxOSwyLjQzNzUgMi43MTksNC41OTM4IGwgMCwzOS42NTY3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzMzLjE4OCwxNjguMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NSAtOS42MjUsLTM4LjM1OSAtMTAuMTg3LC00MC45MzggLTAuNzE5LC0zLjU5MzQgLTAuNzE5LC02LjAzMDkgLTAuNzE5LC03LjkwNTkgMCwtMTQuNjU2MiA4LjE4NywtMjIuMjY1NiAxNy41MTUsLTIyLjI2NTYgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNjMgMzMuOTA3LDQyLjIzNDUgMCwxMy4yMTkgLTcuNDY5LDIyLjU2MiAtMTguMjM1LDIyLjU2MiAtNy40ODQsMCAtMTQuMjM0LC02LjE4NyAtMTYuOTUzLC05LjA2MiBsIDEwLjQ4NSw0MS44MTIgeiBtIC05LjA0NywtOTQuNjcxNSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzMSAtOS42MjUsMTQuNjU2MyAwLDQuNzM0MyAwLjQyMiw3LjQ2ODcgMy4wMTUsMTcuNTE1MiAwLjQyMiwxLjg3NSAyLjcxOSwxMS4wNjMgMy4yOTcsMTIuOTM4IDAuMjk3LDEuMTQxIDguNzY2LDEzLjkzNyAxOC41MzEsMTMuOTM3IDYuMzI5LDAgOS4yMDQsLTYuMzI4IDkuMjA0LC0xMy43OTYgMCwtNi44OTEgLTQuMDMyLC0yMy4xMjU1IC03LjYyNSwtMzAuNTk0MiAtMy41OTQsLTcuNzY1NyAtMTAuMTg4LC0xNC42NTYzIC0xNi43OTcsLTE0LjY1NjMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3NzIuNjA5LDU4LjY1NjMgMTAuNTMyLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDY4LDE5LjA3ODEgMjEuNDY4LDI5LjAxNTYgMCwxMS4zMjg0IC04Ljk1MywxOS4yNjU0IC0yMS4wNjIsMTkuMjY1NCAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNCAtMTguNTc4LC0xNy45ODQxIDAsLTUuNTYyNSA0Ljk2OSwtNS41NjI1IDUuMjY1LC01LjU2MjUgMS42ODgsMCA1LjE1NywxLjIwMzEgNS4xNTcsNS4yNjU2IDAsMi41OTQgLTEuNzgyLDUuMTcyIC01LjI2Niw1LjE3MiAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDk0IDIuMjgxLDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ3IDEzLjMxMywtMTYuMTg3NCAwLC03Ljk1MzEgLTQuOTY5LC0xNS43OTY4IC0xMC40MzgsLTIxLjk1MzEgTCA3NjYuMDYzLDU0LjY3MTkgQyA3NjQuOTY5LDUzLjU3ODEgNzY0Ljk2OSw1My4zOTA2IDc2NC45NjksNTEgbCAzNi44NTksMCAyLjc4MSwxNy4yODEzIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIwMywtNy4zNDM4IC0yLjE4NywtOC44NDM4IC0wLjcwNCwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDM4LC0wLjc4MTIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MjMuNjA5LDU4LjY1NjMgMTAuNTMyLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDY4LDE5LjA3ODEgMjEuNDY4LDI5LjAxNTYgMCwxMS4zMjg0IC04Ljk1MywxOS4yNjU0IC0yMS4wNjIsMTkuMjY1NCAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNCAtMTguNTc4LC0xNy45ODQxIDAsLTUuNTYyNSA0Ljk2OSwtNS41NjI1IDUuMjY1LC01LjU2MjUgMS42ODgsMCA1LjE1NywxLjIwMzEgNS4xNTcsNS4yNjU2IDAsMi41OTQgLTEuNzgyLDUuMTcyIC01LjI2Niw1LjE3MiAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDk0IDIuMjgxLDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQwNiwxMC4xMjUgOS4wNDcsMCAxMy4zMTMsLTguMDQ3IDEzLjMxMywtMTYuMTg3NCAwLC03Ljk1MzEgLTQuOTY5LC0xNS43OTY4IC0xMC40MzgsLTIxLjk1MzEgTCA4MTcuMDYzLDU0LjY3MTkgQyA4MTUuOTY5LDUzLjU3ODEgODE1Ljk2OSw1My4zOTA2IDgxNS45NjksNTEgbCAzNi44NTksMCAyLjc4MSwxNy4yODEzIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIwMywtNy4zNDM4IC0yLjE4NywtOC44NDM4IC0wLjcwNCwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDM4LC0wLjc4MTIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5MzAuNjU2LDEyNS43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0MDUgLTI1Ljg1OSwtMzkuNjQwNSAtOC43NjYsMCAtMTAuNDg1LDcuMzI4MSAtMTAuNDg1LDEyLjY0MDYgMCw3LjE4NzUgMy4yOTcsMTcuMjM0OSA3LjE4OCwyNy41Nzc5IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MDYgLTYuOTA2LC0yMi44NDM3IC02LjkwNiwtMjYuMjgxMiAwLC0zLjE3MTkgMC40MzgsLTkuMDQ2OSA0Ljg5MSwtMTMuMDc4MiA1LjE3MiwtNC40NTMxIDEyLjM1OSwtNC40NTMxIDEzLjY0LC00LjQ1MzEgMjMuODYsMCAzMi4wNDcsNDYuOTg0NSAzMi4wNDcsNTUuMTcxNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk4MS4yODEsODguODQzOCBjIDAuMzkxLDEuMzkwNiAwLjM5MSwxLjU5MzcgMC4zOTEsMi4yODEyIDAsMS43OTY5IC0xLjM5MSwyLjY4NzUgLTIuODc1LDIuNjg3NSAtMSwwIC0yLjU3OCwtMC41OTM3IC0zLjQ4NCwtMi4wNzgxIC0wLjE4OCwtMC41IC0wLjk4NSwtMy41NzgxIC0xLjM5MSwtNS4zNzUgLTAuNjg4LC0yLjU3ODEgLTEuMzkxLC01LjI2NTYgLTEuOTg0LC03LjkzNzUgbCAtNC40NjksLTE3Ljg5MDYgYyAtMC4zOTEsLTEuNDg0NCAtNC42NzIsLTguNDM3NSAtMTEuMjE5LC04LjQzNzUgLTUuMDc4LDAgLTYuMTU2LDQuMzc1IC02LjE1Niw4LjA0NjggMCw0LjU2MjUgMS42ODcsMTAuNzM0NCA1LjA2MiwxOS40Njg4IDEuNTc4LDQuMDc4MSAxLjk4NSw1LjE3MTkgMS45ODUsNy4xNTYyIDAsNC40Njg4IC0zLjE4OCw4LjE0MDcgLTguMTQxLDguMTQwNyAtOS40MzcsMCAtMTMuMTI1LC0xNC40MDYzIC0xMy4xMjUsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMjAzLC0xIDAuOTg1LDAgMS4wOTQsMC4yMDMxIDEuNTc4LDEuNzk2OSAyLjY4OCw5LjMyODEgNi42NTcsMTIuMzEyNSAxMC4wMzIsMTIuMzEyNSAwLjc5NiwwIDIuNDg0LDAgMi40ODQsLTMuMTcxOSAwLC0yLjQ4NDQgLTAuOTg0LC01LjA2MjUgLTEuNjg4LC02Ljk1MzEgLTMuOTY4LC0xMC41MzEzIC01Ljc1LC0xNi4yMDMyIC01Ljc1LC0yMC44NTk0IDAsLTguODQzOCA2LjI1LC0xMS44MjgxIDEyLjExLC0xMS44MjgxIDMuODc1LDAgNy4yNSwxLjY4NzUgMTAuMDMxLDQuNDY4NyAtMS4yODEsLTUuMTU2MiAtMi40ODQsLTEwLjAzMTIgLTYuNDUzLC0xNS4yOTY5IC0yLjU3OCwtMy4zNzUgLTYuMzU5LC02LjI1IC0xMC45MjIsLTYuMjUgLTEuMzkxLDAgLTUuODU5LDAuMjk2OSAtNy41NDcsNC4xNzE5IDEuNTc4LDAgMi44NzUsMCA0LjI2NiwxLjE4NzUgMSwwLjg5MDYgMS45ODQsMi4xODc1IDEuOTg0LDQuMDc4MSAwLDMuMDc4MiAtMi42ODcsMy40Njg4IC0zLjY3MiwzLjQ2ODggLTIuMjgxLDAgLTUuNTYyLC0xLjU5MzggLTUuNTYyLC02LjQ1MzEgMCwtNC45Njg4IDQuMzc1LC04LjY0MDcgMTAuNTMxLC04LjY0MDcgMTAuMjM0LDAgMjAuNDUzLDkuMDMxMyAyMy4yMzQsMjAuMjY1NyBsIDkuNTQ3LDM3LjkzNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMTg2Ljk3LDExOC41NDcgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC04NC42MSwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxODkgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzgyIDAsMi43MzQzIC0yLjQzLDIuNzM0MyAtNC41OSwyLjczNDMgbCAtODQuNjEsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41OTM3IDAsLTIuNzE4OCAyLjQ1LC0yLjcxODggNC42MSwtMi43MTg4IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDcyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEzNjcuNjYsMTI1LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMSAtOC42MywtMzkuNjQwNSAtMjUuODYsLTM5LjY0MDUgLTguNzcsMCAtMTAuNDksNy4zMjgxIC0xMC40OSwxMi42NDA2IDAsNy4xODc1IDMuMywxNy4yMzQ5IDcuMTksMjcuNTc3OSAyLjMsNS44OTEgMi44OCw3LjMyOCAyLjg4LDEwLjIwMyAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMzQ0IDkuMDUsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTA2IC02LjksLTIyLjg0MzcgLTYuOSwtMjYuMjgxMiAwLC0zLjE3MTkgMC40NCwtOS4wNDY5IDQuODksLTEzLjA3ODIgNS4xNywtNC40NTMxIDEyLjM2LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA1LDQ2Ljk4NDUgMzIuMDUsNTUuMTcxNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0MDAuMTMsMTcxLjE4OCBjIDAuNSwxLjE4NyAwLjksMi4wNzggMC45LDMuMDc4IDAsMi44NzUgLTIuNTksNS4yNjUgLTUuNjcsNS4yNjUgLTIuNzgsMCAtNC41NiwtMS44OSAtNS4yNywtNC40NjggbCAtMTEuODEsLTQzLjQwNyBjIDAsLTAuMjAzIC0wLjQsLTEuMjk3IC0wLjQsLTEuMzkgMCwtMS4wOTQgMi41OSwtMS43OTcgMy4zOSwtMS43OTcgMC41OSwwIDAuNjgsMC4yOTcgMS4yOCwxLjU5NCBsIDE3LjU4LDQxLjEyNSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0MTguMjgsNzMuODQzOCBjIDAuMzksMS4zOTA2IDAuMzksMS41OTM3IDAuMzksMi4yODEyIDAsMS43OTY5IC0xLjM5LDIuNjg3NSAtMi44NywyLjY4NzUgLTEsMCAtMi41OCwtMC41OTM3IC0zLjQ5LC0yLjA3ODEgLTAuMTgsLTAuNSAtMC45OCwtMy41NzgxIC0xLjM5LC01LjM3NSAtMC42OSwtMi41NzgxIC0xLjM5LC01LjI2NTYgLTEuOTgsLTcuOTM3NSBsIC00LjQ3LC0xNy44OTA2IGMgLTAuMzksLTEuNDg0NCAtNC42NywtOC40Mzc1IC0xMS4yMiwtOC40Mzc1IC01LjA4LDAgLTYuMTYsNC4zNzUgLTYuMTYsOC4wNDY4IDAsNC41NjI1IDEuNjksMTAuNzM0NCA1LjA3LDE5LjQ2ODggMS41Nyw0LjA3ODEgMS45OCw1LjE3MTkgMS45OCw3LjE1NjIgMCw0LjQ2ODggLTMuMTksOC4xNDA3IC04LjE0LDguMTQwNyAtOS40NCwwIC0xMy4xMiwtMTQuNDA2MyAtMTMuMTIsLTE1LjI5NjkgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjIwMzEgMS41OCwxLjc5NjkgMi42OCw5LjMyODEgNi42NSwxMi4zMTI1IDEwLjAzLDEyLjMxMjUgMC43OSwwIDIuNDgsMCAyLjQ4LC0zLjE3MTkgMCwtMi40ODQ0IC0wLjk4LC01LjA2MjUgLTEuNjksLTYuOTUzMSAtMy45NiwtMTAuNTMxMyAtNS43NSwtMTYuMjAzMiAtNS43NSwtMjAuODU5NCAwLC04Ljg0MzggNi4yNSwtMTEuODI4MSAxMi4xMSwtMTEuODI4MSAzLjg4LDAgNy4yNSwxLjY4NzUgMTAuMDQsNC40Njg3IC0xLjI5LC01LjE1NjIgLTIuNDksLTEwLjAzMTIgLTYuNDYsLTE1LjI5NjkgLTIuNTgsLTMuMzc1IC02LjM2LC02LjI1IC0xMC45MiwtNi4yNSAtMS4zOSwwIC01Ljg2LDAuMjk2OSAtNy41NSw0LjE3MTkgMS41OCwwIDIuODgsMCA0LjI3LDEuMTg3NSAxLDAuODkwNiAxLjk4LDIuMTg3NSAxLjk4LDQuMDc4MSAwLDMuMDc4MiAtMi42OCwzLjQ2ODggLTMuNjcsMy40Njg4IC0yLjI4LDAgLTUuNTYsLTEuNTkzOCAtNS41NiwtNi40NTMxIDAsLTQuOTY4OCA0LjM3LC04LjY0MDcgMTAuNTMsLTguNjQwNyAxMC4yMywwIDIwLjQ1LDkuMDMxMyAyMy4yMywyMC4yNjU3IGwgOS41NSwzNy45Mzc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ1Mi40NCw3OC44OTA2IGMgMCw0LjE3MTkgLTMuNDYsNy4wNDY5IC02LjkxLDcuMDQ2OSAtNC4xNSwwIC03LjAzLC0zLjQ1MzEgLTcuMDMsLTYuODkwNiAwLC00LjE3MTkgMy40NSwtNy4wNDY5IDYuODksLTcuMDQ2OSA0LjE3LDAgNy4wNSwzLjQ1MzEgNy4wNSw2Ljg5MDYiIC8+PC9nPjwvZz48L3N2Zz4=)

![\LARGE \begin{matrix}Av'=v,\\[2mm]Bv=v'.\end{matrix}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDg3IDYwIgogICBoZWlnaHQ9IjYwIgogICB3aWR0aD0iODciCiAgIHhtbDpzcGFjZT0icHJlc2VydmUiCiAgIHZlcnNpb249IjEuMSIKICAgaWQ9InN2ZzIiPjxtZXRhZGF0YQogICAgIGlkPSJtZXRhZGF0YTgiPjxyZGY6UkRGPjxjYzpXb3JrCiAgICAgICAgIHJkZjphYm91dD0iIj48ZGM6Zm9ybWF0PmltYWdlL3N2Zyt4bWw8L2RjOmZvcm1hdD48ZGM6dHlwZQogICAgICAgICAgIHJkZjpyZXNvdXJjZT0iaHR0cDovL3B1cmwub3JnL2RjL2RjbWl0eXBlL1N0aWxsSW1hZ2UiIC8+PC9jYzpXb3JrPjwvcmRmOlJERj48L21ldGFkYXRhPjxkZWZzCiAgICAgaWQ9ImRlZnM2IiAvPjxnCiAgICAgdHJhbnNmb3JtPSJtYXRyaXgoMSwwLDAsLTEsMCw2MCkiCiAgICAgaWQ9ImcxMCI+PGcKICAgICAgIHRyYW5zZm9ybT0ic2NhbGUoMC4xLDAuMSkiCiAgICAgICBpZD0iZzEyIj48cGF0aAogICAgICAgICBpZD0icGF0aDE0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJNIDQzLjA5MzgsNDAyLjQ4NCBDIDM0LjQyMTksMzg3Ljg3NSAyNiwzODIuOTIyIDE0LjEyNSwzODIuMTg4IGMgLTIuNzM0NCwtMC4yNSAtNC43MDMxMiwtMC4yNSAtNC43MDMxMiwtNC43MTkgMCwtMS40ODUgMS4yMzQ0MiwtMi40NjkgMi45Njg3MiwtMi40NjkgNC40NTMyLDAgMTUuNTkzOCwwLjUgMjAuMDQ2OSwwLjUgNy4xODc1LDAgMTUuMTA5NCwtMC41IDIyLjA0NjksLTAuNSAxLjQ4NDQsMCA0LjQ1MzEsMCA0LjQ1MzEsNC43MDMgMCwyLjIzNSAtMS45ODQ0LDIuNDg1IC0zLjQ2ODcsMi40ODUgLTUuNzAzMiwwLjQ4NCAtMTAuNDA2MywyLjQ2OCAtMTAuNDA2Myw4LjQwNiAwLDMuNDY5IDEuNDg0NCw2LjE4NyA0LjcwMzEsMTEuNjQgbCAxOC44MjgyLDMxLjE4OCA2My4xMjUyLDAgYyAwLjI1LC0yLjIxOSAwLjI1LC00LjIwMyAwLjUsLTYuNDM4IDAuNzM0LC02LjQzNyAzLjcxOSwtMzIuMTcxIDMuNzE5LC0zNi44NzUgMCwtNy40MzcgLTEyLjY0MSwtNy45MjEgLTE2LjU5NCwtNy45MjEgLTIuNzE5LDAgLTUuNDUzLDAgLTUuNDUzLC00LjQ2OSAwLC0yLjcxOSAyLjIzNCwtMi43MTkgMy43MTgsLTIuNzE5IDQuMjA0LDAgOS4xNTcsMC41IDEzLjM3NSwwLjUgbCAxNC4xMSwwIGMgMTUuMDk0LDAgMjYsLTAuNSAyNi4yMzQsLTAuNSAxLjczNSwwIDQuNDY5LDAgNC40NjksNC43MDMgMCwyLjQ4NSAtMi4yMzQsMi40ODUgLTUuOTUzLDIuNDg1IC0xMy42MSwwIC0xMy44NiwyLjIxOCAtMTQuNjEsOS42NCBsIC0xNS4wOTMsMTU0LjUgYyAtMC41LDQuOTUzIC0xLjQ4NSw1LjQzOCAtNC4yMDMsNS40MzggLTIuNDg1LDAgLTMuOTY5LC0wLjQ4NSAtNi4yMDQsLTQuMjAzIEwgNDMuMDkzOCw0MDIuNDg0IFogbSAyOS43MDMxLDM4LjEyNSA0OS43NjYxLDgzLjE4OCA4LjQyMSwtODMuMTg4IC01OC4xODcxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyOTcuMTQxLDQ2Ny41OTQgYyAwLDE1LjU5NCAtNy45MjIsMTYuNTk0IC05LjkwNywxNi41OTQgLTUuOTM3LDAgLTExLjM3NSwtNS45NTQgLTExLjM3NSwtMTAuOTA3IDAsLTIuOTY4IDEuNzE5LC00LjcwMyAyLjcxOSwtNS42ODcgMi40NjksLTIuMjM1IDguOTA2LC04LjkwNiA4LjkwNiwtMjEuNzgxIDAsLTEwLjQwNyAtMTQuODQzLC02OC4zNDQgLTQ0LjU2MiwtNjguMzQ0IC0xNS4wOTQsMCAtMTguMDc4LDEyLjY0IC0xOC4wNzgsMjEuNzk3IDAsMTIuMzc1IDUuNzAzLDI5LjcwMyAxMi4zOSw0Ny41MzEgMy45NTQsMTAuMTU2IDQuOTU0LDEyLjYyNSA0Ljk1NCwxNy41NzggMCwxMC40MDYgLTcuNDM4LDE5LjgxMyAtMTkuNTYzLDE5LjgxMyAtMjIuNzgxLDAgLTMxLjkzNywtMzUuOTA3IC0zMS45MzcsLTM3Ljg5MSAwLC0wLjk4NCAwLjk4NCwtMi4yMTkgMi43MTgsLTIuMjE5IDIuMjM1LDAgMi40ODUsMC45ODUgMy40NjksNC40NTMgNS45MzgsMjEuMjk3IDE1LjU5NCwzMC43MDMgMjUsMzAuNzAzIDIuMjM0LDAgNi40MzgsMCA2LjQzOCwtOC4xNzEgMCwtNi40MzggLTIuNzE5LC0xMy42MjUgLTYuNDM4LC0yMy4wMzIgQyAyMTAsNDE2LjM0NCAyMTAsNDA4LjY3MiAyMTAsNDAyLjczNCBjIDAsLTUuNDUzIDAuNzM0LC0xNS42MDkgOC40MDYsLTIyLjUzMSA4LjkyMiwtNy42NzIgMjEuMjk3LC03LjY3MiAyMy41MzIsLTcuNjcyIDQxLjA5MywwIDU1LjIwMyw4MC45NTMgNTUuMjAzLDk1LjA2MyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDM2Mi4yMDMsNTc1IGMgMS4wMzEsMi40NjkgMS44NDQsNC4zMjggMS44NDQsNi4zOTEgMCw1Ljk4NCAtNS4zNTksMTAuOTM3IC0xMS43NSwxMC45MzcgLTUuNzgxLDAgLTkuNSwtMy45MjIgLTEwLjkzOCwtOS4yODEgbCAtMjQuNTQ2LC05MC4xNTYgYyAwLC0wLjQyMiAtMC44MjksLTIuNjg4IC0wLjgyOSwtMi44OTEgMCwtMi4yNjYgNS4zNiwtMy43MTkgNy4wMTYsLTMuNzE5IDEuMjM0LDAgMS40MzgsMC42MjUgMi42ODgsMy4yOTcgTCAzNjIuMjAzLDU3NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDU5OS4xODgsNDU0LjQ2OSBjIDMuNzE4LDAgNy40MzcsMCA3LjQzNyw0LjIxOSAwLDQuNDUzIC00LjIxOSw0LjQ1MyAtOC40MjIsNC40NTMgbCAtMTM4LjM5LDAgYyAtNC4yMTksMCAtOC40MjIsMCAtOC40MjIsLTQuNDUzIDAsLTQuMjE5IDMuNzE4LC00LjIxOSA3LjQyMiwtNC4yMTkgbCAxNDAuMzc1LDAgeiBtIC0wLjk4NSwtNDQuMDYzIGMgNC4yMDMsMCA4LjQyMiwwIDguNDIyLDQuNDUzIDAsNC4yMDQgLTMuNzE5LDQuMjA0IC03LjQzNyw0LjIwNCBsIC0xNDAuMzc1LDAgYyAtMy43MDQsMCAtNy40MjIsMCAtNy40MjIsLTQuMjA0IDAsLTQuNDUzIDQuMjAzLC00LjQ1MyA4LjQyMiwtNC40NTMgbCAxMzguMzksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgwMS4xNDEsNDY3LjU5NCBjIDAsMTUuNTk0IC03LjkyMiwxNi41OTQgLTkuOTA3LDE2LjU5NCAtNS45MzcsMCAtMTEuMzc1LC01Ljk1NCAtMTEuMzc1LC0xMC45MDcgMCwtMi45NjggMS43MTksLTQuNzAzIDIuNzE5LC01LjY4NyAyLjQ2OSwtMi4yMzUgOC45MDYsLTguOTA2IDguOTA2LC0yMS43ODEgMCwtMTAuNDA3IC0xNC44NDMsLTY4LjM0NCAtNDQuNTYyLC02OC4zNDQgLTE1LjA5NCwwIC0xOC4wNzgsMTIuNjQgLTE4LjA3OCwyMS43OTcgMCwxMi4zNzUgNS43MDMsMjkuNzAzIDEyLjM5LDQ3LjUzMSAzLjk1NCwxMC4xNTYgNC45NTQsMTIuNjI1IDQuOTU0LDE3LjU3OCAwLDEwLjQwNiAtNy40MzgsMTkuODEzIC0xOS41NjMsMTkuODEzIC0yMi43ODEsMCAtMzEuOTM3LC0zNS45MDcgLTMxLjkzNywtMzcuODkxIDAsLTAuOTg0IDAuOTg0LC0yLjIxOSAyLjcxOCwtMi4yMTkgMi4yMzUsMCAyLjQ4NSwwLjk4NSAzLjQ2OSw0LjQ1MyA1LjkzOCwyMS4yOTcgMTUuNTk0LDMwLjcwMyAyNSwzMC43MDMgMi4yMzQsMCA2LjQzOCwwIDYuNDM4LC04LjE3MSAwLC02LjQzOCAtMi43MTksLTEzLjYyNSAtNi40MzgsLTIzLjAzMiBDIDcxNCw0MTYuMzQ0IDcxNCw0MDguNjcyIDcxNCw0MDIuNzM0IGMgMCwtNS40NTMgMC43MzQsLTE1LjYwOSA4LjQwNiwtMjIuNTMxIDguOTIyLC03LjY3MiAyMS4yOTcsLTcuNjcyIDIzLjUzMiwtNy42NzIgNDEuMDkzLDAgNTUuMjAzLDgwLjk1MyA1NS4yMDMsOTUuMDYzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODYyLjI4MSwzNzQuMDE2IGMgMCwxNC4zNTkgLTQuNzAzLDI1IC0xNC44NTksMjUgLTcuOTIyLDAgLTExLjg3NSwtNi40MzggLTExLjg3NSwtMTEuODkxIDAsLTUuNDM3IDMuNzAzLC0xMi4xMjUgMTIuMTI1LC0xMi4xMjUgMy4yMTksMCA1LjkzNywwLjk4NCA4LjE3MiwzLjIxOSAwLjUsMC41IDAuNzM0LDAuNSAwLjk4NCwwLjUgMC41LDAgMC41LC0zLjQ2OSAwLjUsLTQuNzAzIDAsLTguMTcyIC0xLjQ4NCwtMjQuMjY2IC0xNS44NDQsLTQwLjM2IC0yLjcxOCwtMi45NjggLTIuNzE4LC0zLjQ2OCAtMi43MTgsLTMuOTY4IDAsLTEuMjM1IDEuMjM0LC0yLjQ2OSAyLjQ2OCwtMi40NjkgMS45ODUsMCAyMS4wNDcsMTguMzEyIDIxLjA0Nyw0Ni43OTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4NC42MDk0LDE2My4yNjYgYyAyLjIzNDQsOS4xNTYgMy4yMTg3LDkuNjU2IDEyLjg3NSw5LjY1NiBsIDMyLjE4NzYsMCBjIDI3Ljk4NCwwIDI3Ljk4NCwtMjMuNzY2IDI3Ljk4NCwtMjYgMCwtMjAuMDYzIC0yMC4wNjIsLTQ1LjU2MyAtNTIuNzM0LC00NS41NjMgbCAtMzUuNjU2NCwwIDE1LjM0MzgsNjEuOTA3IHogTSAxMjYuNDUzLDk5LjM5MDYgYyAyNi45ODUsNC45NTM0IDUxLjUsMjMuNzY1NCA1MS41LDQ2LjU0NzQgMCwxOS4yOTYgLTE3LjA3OCwzNC4xNTYgLTQ1LjA2MiwzNC4xNTYgbCAtNzkuNDY5MSwwIGMgLTQuNzAzMSwwIC02LjkzNzUsMCAtNi45Mzc1LC00LjcwMyAwLC0yLjQ2OSAyLjIzNDQsLTIuNDY5IDUuOTM3NSwtMi40NjkgMTUuMTA5NCwwIDE1LjEwOTQsLTEuOTg0IDE1LjEwOTQsLTQuNzAzIDAsLTAuNSAwLC0xLjk4NSAtMC45ODQ0LC01LjcwMyBMIDMzLjEyNSwyOS4zMjgxIEMgMzAuODkwNiwyMC42NTYzIDMwLjM5MDYsMTguMTg3NSAxMy4wNjI1LDE4LjE4NzUgYyAtNC43MDMxMiwwIC03LjE3MTg3LDAgLTcuMTcxODcsLTQuNDY4NyBDIDUuODkwNjMsMTEgNy4zNzUsMTEgMTIuMzI4MSwxMSBsIDg0LjkwNjMsMCBjIDM3Ljg5MDYsMCA2Ny4wOTM2LDI4LjcxODggNjcuMDkzNiw1My43MTg4IDAsMjAuMzEyNSAtMTcuODEyLDMyLjY4NzUgLTM3Ljg3NSwzNC42NzE4IHogbSAtMzUuMTU2MSwtODEuMjAzMSAtMzMuNDIxOSwwIGMgLTMuNDY4NywwIC0zLjk2ODcsMCAtNS40NTMxLDAuMjM0NCAtMi43MTg4LDAuMjUgLTIuOTY4OCwwLjc1IC0yLjk2ODgsMi43MzQ0IDAsMS43MzQzIDAuNSwzLjIxODcgMSw1LjQzNzUgbCAxNy4zMjgyLDY5LjgyODEgNDYuNTQ2NywwIGMgMjkuMjAzLDAgMjkuMjAzLC0yNy4yMzQ0IDI5LjIwMywtMjkuMjE4OCAwLC0yMy43NjU2IC0yMS41MzEsLTQ5LjAxNTYgLTUyLjIzNDEsLTQ5LjAxNTYiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzMDQuMTQxLDEwMy41OTQgYyAwLDE1LjU5NCAtNy45MjIsMTYuNTk0IC05LjkwNywxNi41OTQgLTUuOTM3LDAgLTExLjM3NSwtNS45NTQgLTExLjM3NSwtMTAuOTA3IDAsLTIuOTY4IDEuNzE5LC00LjcwMyAyLjcxOSwtNS42ODcgMi40NjksLTIuMjM1IDguOTA2LC04LjkwNjUgOC45MDYsLTIxLjc4MTUgMCwtMTAuNDA2MiAtMTQuODQzLC02OC4zNDM3IC00NC41NjIsLTY4LjM0MzcgLTE1LjA5NCwwIC0xOC4wNzgsMTIuNjQwNiAtMTguMDc4LDIxLjc5NjggMCwxMi4zNzUgNS43MDMsMjkuNzAzMiAxMi4zOSw0Ny41MzEzIDMuOTU0LDEwLjE1NjIgNC45NTQsMTIuNjI1IDQuOTU0LDE3LjU3ODEgMCwxMC40MDYgLTcuNDM4LDE5LjgxMyAtMTkuNTYzLDE5LjgxMyAtMjIuNzgxLDAgLTMxLjkzNywtMzUuOTA2NyAtMzEuOTM3LC0zNy44OTExIDAsLTAuOTg0NCAwLjk4NCwtMi4yMTg4IDIuNzE4LC0yLjIxODggMi4yMzUsMCAyLjQ4NSwwLjk4NDQgMy40NjksNC40NTMyIDUuOTM4LDIxLjI5NjcgMTUuNTk0LDMwLjcwMjcgMjUsMzAuNzAyNyAyLjIzNCwwIDYuNDM4LDAgNi40MzgsLTguMTcxIDAsLTYuNDM4IC0yLjcxOSwtMTMuNjI1NSAtNi40MzgsLTIzLjAzMTcgQyAyMTcsNTIuMzQzOCAyMTcsNDQuNjcxOSAyMTcsMzguNzM0NCBjIDAsLTUuNDUzMSAwLjczNCwtMTUuNjA5NCA4LjQwNiwtMjIuNTMxMyA4LjkyMiwtNy42NzE4NSAyMS4yOTcsLTcuNjcxODUgMjMuNTMyLC03LjY3MTg1IDQxLjA5MywwIDU1LjIwMyw4MC45NTMxNSA1NS4yMDMsOTUuMDYyNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA1NDUuMTg4LDkwLjQ2ODggYyAzLjcxOCwwIDcuNDM3LDAgNy40MzcsNC4yMTg3IDAsNC40NTMxIC00LjIxOSw0LjQ1MzEgLTguNDIyLDQuNDUzMSBsIC0xMzguMzksMCBjIC00LjIxOSwwIC04LjQyMiwwIC04LjQyMiwtNC40NTMxIDAsLTQuMjE4NyAzLjcxOCwtNC4yMTg3IDcuNDIyLC00LjIxODcgbCAxNDAuMzc1LDAgeiBtIC0wLjk4NSwtNDQuMDYyNSBjIDQuMjAzLDAgOC40MjIsMCA4LjQyMiw0LjQ1MzEgMCw0LjIwMzEgLTMuNzE5LDQuMjAzMSAtNy40MzcsNC4yMDMxIGwgLTE0MC4zNzUsMCBjIC0zLjcwNCwwIC03LjQyMiwwIC03LjQyMiwtNC4yMDMxIDAsLTQuNDUzMSA0LjIwMywtNC40NTMxIDguNDIyLC00LjQ1MzEgbCAxMzguMzksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDc0Ny4xNDEsMTAzLjU5NCBjIDAsMTUuNTk0IC03LjkyMiwxNi41OTQgLTkuOTA3LDE2LjU5NCAtNS45MzcsMCAtMTEuMzc1LC01Ljk1NCAtMTEuMzc1LC0xMC45MDcgMCwtMi45NjggMS43MTksLTQuNzAzIDIuNzE5LC01LjY4NyAyLjQ2OSwtMi4yMzUgOC45MDYsLTguOTA2NSA4LjkwNiwtMjEuNzgxNSAwLC0xMC40MDYyIC0xNC44NDMsLTY4LjM0MzcgLTQ0LjU2MiwtNjguMzQzNyAtMTUuMDk0LDAgLTE4LjA3OCwxMi42NDA2IC0xOC4wNzgsMjEuNzk2OCAwLDEyLjM3NSA1LjcwMywyOS43MDMyIDEyLjM5LDQ3LjUzMTMgMy45NTQsMTAuMTU2MiA0Ljk1NCwxMi42MjUgNC45NTQsMTcuNTc4MSAwLDEwLjQwNiAtNy40MzgsMTkuODEzIC0xOS41NjMsMTkuODEzIC0yMi43ODEsMCAtMzEuOTM3LC0zNS45MDY3IC0zMS45MzcsLTM3Ljg5MTEgMCwtMC45ODQ0IDAuOTg0LC0yLjIxODggMi43MTgsLTIuMjE4OCAyLjIzNSwwIDIuNDg1LDAuOTg0NCAzLjQ2OSw0LjQ1MzIgNS45MzgsMjEuMjk2NyAxNS41OTQsMzAuNzAyNyAyNSwzMC43MDI3IDIuMjM0LDAgNi40MzgsMCA2LjQzOCwtOC4xNzEgMCwtNi40MzggLTIuNzE5LC0xMy42MjU1IC02LjQzOCwtMjMuMDMxNyBDIDY2MCw1Mi4zNDM4IDY2MCw0NC42NzE5IDY2MCwzOC43MzQ0IGMgMCwtNS40NTMxIDAuNzM0LC0xNS42MDk0IDguNDA2LC0yMi41MzEzIDguOTIyLC03LjY3MTg1IDIxLjI5NywtNy42NzE4NSAyMy41MzIsLTcuNjcxODUgNDEuMDkzLDAgNTUuMjAzLDgwLjk1MzE1IDU1LjIwMyw5NS4wNjI3NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgxMi4yMDMsMjExIGMgMS4wMzEsMi40NjkgMS44NDQsNC4zMjggMS44NDQsNi4zOTEgMCw1Ljk4NCAtNS4zNTksMTAuOTM3IC0xMS43NSwxMC45MzcgLTUuNzgxLDAgLTkuNSwtMy45MjIgLTEwLjkzOCwtOS4yODEgbCAtMjQuNTQ2LC05MC4xNTYgYyAwLC0wLjQyMiAtMC44MjksLTIuNjg4IC0wLjgyOSwtMi44OTEgMCwtMi4yNjYgNS4zNiwtMy43MTkgNy4wMTYsLTMuNzE5IDEuMjM0LDAgMS40MzgsMC42MjUgMi42ODgsMy4yOTcgTCA4MTIuMjAzLDIxMSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg2Ni41NDcsMjIuODkwNiBjIDAsNy4xNzE5IC01LjkzOCwxMi4xMjUgLTExLjg3NSwxMi4xMjUgLTcuMTg4LDAgLTEyLjEyNSwtNS45Mzc1IC0xMi4xMjUsLTExLjg5MDYgMCwtNy4xNzE5IDUuOTM3LC0xMi4xMjUgMTEuODc1LC0xMi4xMjUgNy4xODcsMCAxMi4xMjUsNS45Mzc1IDEyLjEyNSwxMS44OTA2IiAvPjwvZz48L2c+PC9zdmc+)
 ! Таким образом, матрицы, которым посвящена такая обширная статья, нашли
применение уже в почти школьной геометрии плоскости. Что же будет дальше?.. Дальше нас ждёт следующий вопрос. Мы поняли, что систем координат с общим
началом отсчёта на плоскости может быть много, и что любые две из них
связаны соответствующей матрицей
! Таким образом, матрицы, которым посвящена такая обширная статья, нашли
применение уже в почти школьной геометрии плоскости. Что же будет дальше?.. Дальше нас ждёт следующий вопрос. Мы поняли, что систем координат с общим
началом отсчёта на плоскости может быть много, и что любые две из них
связаны соответствующей матрицей 

 (то есть наборы коэффициентов не совпадают целиком).
Вычтем одно равенство из другого и получим, что
(то есть наборы коэффициентов не совпадают целиком).
Вычтем одно равенство из другого и получим, что

 называется линейно независимой, если ни одна
нетривиальная линейная комбинация этих векторов не равна нулевому вектору,
и линейно зависимой,
если, наоборот, существует некая нетривиальная линейная комбинация этих
векторов, равная нулевому вектору.Наглядный пример можно привести на плоскости:
называется линейно независимой, если ни одна
нетривиальная линейная комбинация этих векторов не равна нулевому вектору,
и линейно зависимой,
если, наоборот, существует некая нетривиальная линейная комбинация этих
векторов, равная нулевому вектору.Наглядный пример можно привести на плоскости:
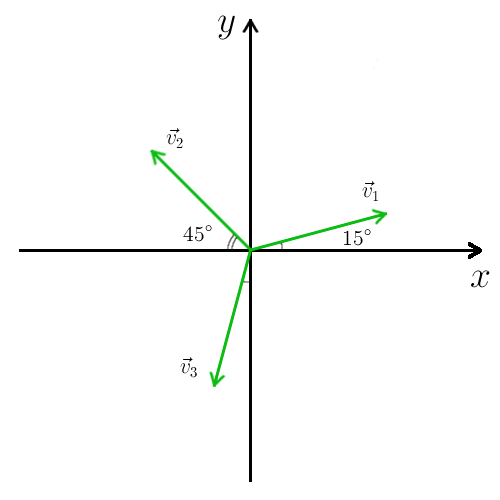
 системы векторов
системы векторов 


 и
и  , то линейная оболочка является просто прямой,
проходящей через начало координат:
, то линейная оболочка является просто прямой,
проходящей через начало координат:

 и два указанных вектора непараллельны, то совершенно
аналогичным образом мы получим проходящую через начало координат
плоскость (если параллельны — снова прямую, по уже описанной выше причине,
если только, разумеется, хоть один из векторов ненулевой). Если
и два указанных вектора непараллельны, то совершенно
аналогичным образом мы получим проходящую через начало координат
плоскость (если параллельны — снова прямую, по уже описанной выше причине,
если только, разумеется, хоть один из векторов ненулевой). Если  и три
указанных вектора не лежат в одной плоскости, то их линейная оболочка будет
представлять из себя трёхмерное пространство. С линейными оболочками связан ещё один важный факт. Если у нас есть
некоторое линейное пространство
и три
указанных вектора не лежат в одной плоскости, то их линейная оболочка будет
представлять из себя трёхмерное пространство. С линейными оболочками связан ещё один важный факт. Если у нас есть
некоторое линейное пространство  , то эта
линейная оболочка тоже будет являться линейным пространством. В самом
деле, складывать векторы и умножать их на число мы уже умеем. Остаётся
проверить всего несколько пунктов определения:
, то эта
линейная оболочка тоже будет являться линейным пространством. В самом
деле, складывать векторы и умножать их на число мы уже умеем. Остаётся
проверить всего несколько пунктов определения:  должна лежать в
должна лежать в  и
и  , лежащих в
, лежащих в ![\begin{array}{ll}\vec{a}=a_1\vec{v}_1+a_2\vec{v}_2+…+a_k\vec{v}_k,&a_1,…,a_k∈ℝ,\\[2mm]
\vec{b}=b_1\vec{v}_1+b_2\vec{v}_2+…+b_k\vec{v}_k,&b_1,…,b_k∈ℝ.\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDI3NCAzOSIKICAgaGVpZ2h0PSIzOSIKICAgd2lkdGg9IjI3NCIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDM5KSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjYuODU5NCwzNjguNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40Mzc1LDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYyLDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQyLjIzNDQsMzAwLjA5NCBjIC0wLjcxODgsLTIuNDM4IC0wLjcxODgsLTIuNzM1IC0yLjcxODgsLTUuNDUzIC0zLjE3MTgsLTQuMDMyIC05LjQ4NDMsLTEwLjIwMyAtMTYuMjM0MywtMTAuMjAzIC01Ljg5MDcsMCAtOS4yMDMyLDUuMzEyIC05LjIwMzIsMTMuNzk2IDAsNy44OTEgNC40NTMyLDIzLjk4NSA3LjE4NzUsMzAuMDE2IDQuODkwNywxMC4wNjMgMTEuNjQwNywxNS4yMzQgMTcuMjM0NCwxNS4yMzQgOS40ODQ0LDAgMTEuMzU5NCwtMTEuNzgxIDExLjM1OTQsLTEyLjkzNyAwLC0wLjE0MSAtMC40Mzc1LC0yIC0wLjU3ODEsLTIuMjk3IGwgLTcuMDQ2OSwtMjguMTU2IHogbSA5LjIwMzEsMzYuNzgxIGMgLTEuNTc4MSwzLjczNCAtNS40Njg3LDkuNDg0IC0xMi45Mzc1LDkuNDg0IC0xNi4yMzQ0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4MSwtMjIuNTYyIDE4LjA5MzgsLTIyLjU2MiA3LjkwNjIsMCAxNC42NTYyLDYuMTcxIDE4LjY3MTgsMTAuOTIxIDEuNDM3NSwtOC40ODQgOC4xODc1LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEyNSwwIDcuNzY1NywyLjU5MyAxMC4zNDM4LDcuNzY1IDIuMjk2OSw0Ljg3NSA0LjMxMjUsMTMuNjQxIDQuMzEyNSwxNC4yMTkgMCwwLjcxOSAtMC41NzgxLDEuMjgxIC0xLjQzNzUsMS4yODEgLTEuMjk2OSwwIC0xLjQzNzUsLTAuNzAzIC0yLjAxNTYsLTIuODU5IC0yLjE0MDcsLTguNDg1IC00Ljg3NSwtMTcuNTMxIC0xMC43NjU3LC0xNy41MzEgLTQuMTcxOCwwIC00LjQ1MzEsMy43MzQgLTQuNDUzMSw2LjYwOSAwLDMuMjk3IDAuNDIxOSw0Ljg3NSAxLjcxODgsMTAuNDg0IDEuMDE1NiwzLjU5NCAxLjczNDMsNi43NSAyLjg3NSwxMC45MjIgNS4zMTI1LDIxLjU0NyA2LjYwOTMsMjYuNzE5IDYuNjA5MywyNy41NzggMCwyLjAxNiAtMS41NzgxLDMuNTk0IC0zLjczNDMsMy41OTQgLTQuNTkzOCwwIC01Ljc1LC01LjAzMSAtNi4wMzEzLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA5Ljk2OSwzMjkuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDMwNS4yMzQsMzAwLjA5NCBjIC0wLjcxOCwtMi40MzggLTAuNzE4LC0yLjczNSAtMi43MTgsLTUuNDUzIC0zLjE3MiwtNC4wMzIgLTkuNDg1LC0xMC4yMDMgLTE2LjIzNSwtMTAuMjAzIC01Ljg5LDAgLTkuMjAzLDUuMzEyIC05LjIwMywxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xODgsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMzQsMTUuMjM0IDkuNDg0LDAgMTEuMzU5LC0xMS43ODEgMTEuMzU5LC0xMi45MzcgMCwtMC4xNDEgLTAuNDM3LC0yIC0wLjU3OCwtMi4yOTcgbCAtNy4wNDcsLTI4LjE1NiB6IG0gOS4yMDQsMzYuNzgxIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOTQsLTIyLjU2MiA3LjkwNiwwIDE0LjY1Niw2LjE3MSAxOC42NzIsMTAuOTIxIDEuNDM3LC04LjQ4NCA4LjE4NywtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxMiwwIDcuNzY1LDIuNTkzIDEwLjM0Myw3Ljc2NSAyLjI5Nyw0Ljg3NSA0LjMxMywxMy42NDEgNC4zMTMsMTQuMjE5IDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzOCwxLjI4MSAtMS4yOTYsMCAtMS40MzcsLTAuNzAzIC0yLjAxNSwtMi44NTkgLTIuMTQxLC04LjQ4NSAtNC44NzUsLTE3LjUzMSAtMTAuNzY2LC0xNy41MzEgLTQuMTcyLDAgLTQuNDUzLDMuNzM0IC00LjQ1Myw2LjYwOSAwLDMuMjk3IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NCAxLjAxNSwzLjU5NCAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMiA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDIyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDM2NC4yMDMsMzI1LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDI0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ2MS44NTksMzY4Ljc2NiBjIC0xLjczNCwtMS41NzggLTcuMDQ2LC02LjYxIC03LjA0NiwtOC42MjUgMCwtMS40MzggMS4yOTYsLTIuNzE5IDIuNzM0LC0yLjcxOSAxLjI5NywwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzLDQuMjk3IDcuMzI4LDcuMDMxIDEwLjYyNSw4LjkwNiAxLjQzNywwLjg1OSAyLjQ1MywxLjI4MSAyLjQ1MywyLjg3NSAwLDEuMjgxIC0xLjE1NiwyIC0yLjAxNiwyLjcxOSAtNC4wMzEsMi43MzQgLTUuMDMxLDYuNjA5IC01LjQ2OCw4LjMyOCAtMC40MjIsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODc1LDAgLTIuNTkzLC0wLjU2MyAtMi41OTMsLTIuNzE5IDAsLTEuMjk3IDAuODU5LC00Ljc1IDMuNTkzLC04LjYyNSBsIC00OC4yNjUsMCBjIC0yLjQ1MywwIC00Ljg5MSwwIC00Ljg5MSwtMi43MzQgMCwtMi41NzggMi41OTQsLTIuNTc4IDQuODkxLC0yLjU3OCBsIDQ1Ljk2OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDU1LjY1NiwzMzYuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0ODcuMjAzLDMyNS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2MDIuMzEzLDMxNi4xODggMzkuNjU2LDAgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNCAtMi40MzgsMi43MzQgLTQuNTk0LDIuNzM0IGwgLTM5LjY1NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTc5LDQuNTk0IC0yLjczNCwwIC0yLjczNCwtMi40NTMgLTIuNzM0LC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4IDAsLTIuNzM0IDIuNDUzLC0yLjczNCA0LjYwOSwtMi43MzQgbCAzOS42NDEsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTk0LC00LjU5MyAyLjcxOSwwIDIuNzE5LDIuNDM3IDIuNzE5LDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3MjkuMjM0LDMwMC4wOTQgYyAtMC43MTgsLTIuNDM4IC0wLjcxOCwtMi43MzUgLTIuNzE4LC01LjQ1MyAtMy4xNzIsLTQuMDMyIC05LjQ4NSwtMTAuMjAzIC0xNi4yMzUsLTEwLjIwMyAtNS44OSwwIC05LjIwMyw1LjMxMiAtOS4yMDMsMTMuNzk2IDAsNy44OTEgNC40NTMsMjMuOTg1IDcuMTg4LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjM0LDE1LjIzNCA5LjQ4NCwwIDExLjM1OSwtMTEuNzgxIDExLjM1OSwtMTIuOTM3IDAsLTAuMTQxIC0wLjQzNywtMiAtMC41NzgsLTIuMjk3IGwgLTcuMDQ3LC0yOC4xNTYgeiBtIDkuMjA0LDM2Ljc4MSBjIC0xLjU3OSwzLjczNCAtNS40NjksOS40ODQgLTEyLjkzOCw5LjQ4NCAtMTYuMjM0LDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzI4LC0yMi41NjIgMTguMDk0LC0yMi41NjIgNy45MDYsMCAxNC42NTYsNi4xNzEgMTguNjcyLDEwLjkyMSAxLjQzNywtOC40ODQgOC4xODcsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMTIsMCA3Ljc2NSwyLjU5MyAxMC4zNDMsNy43NjUgMi4yOTcsNC44NzUgNC4zMTMsMTMuNjQxIDQuMzEzLDE0LjIxOSAwLDAuNzE5IC0wLjU3OCwxLjI4MSAtMS40MzgsMS4yODEgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMyAtMi4wMTUsLTIuODU5IC0yLjE0MSwtOC40ODUgLTQuODc1LC0xNy41MzEgLTEwLjc2NiwtMTcuNTMxIC00LjE3MiwwIC00LjQ1MywzLjczNCAtNC40NTMsNi42MDkgMCwzLjI5NyAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQgMS4wMTUsMy41OTQgMS43MzQsNi43NSAyLjg3NSwxMC45MjIgNS4zMTIsMjEuNTQ3IDYuNjA5LDI2LjcxOSA2LjYwOSwyNy41NzggMCwyLjAxNiAtMS41NzgsMy41OTQgLTMuNzM0LDMuNTk0IC00LjU5NCwwIC01Ljc1LC01LjAzMSAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3NzIuNjA5LDI2OS42NTYgMTAuNTMyLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ2OCwxOS4wNzggMjEuNDY4LDI5LjAxNiAwLDExLjMyOCAtOC45NTMsMTkuMjY1IC0yMS4wNjIsMTkuMjY1IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk2OSwtNS41NjMgNS4yNjUsLTUuNTYzIDEuNjg4LDAgNS4xNTcsMS4yMDQgNS4xNTcsNS4yNjYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDcgMTMuMzEzLC0xNi4xODcgMCwtNy45NTMgLTQuOTY5LC0xNS43OTcgLTEwLjQzOCwtMjEuOTUzIGwgLTE5LjA2MiwtMjEuMjY2IGMgLTEuMDk0LC0xLjA5NCAtMS4wOTQsLTEuMjgxIC0xLjA5NCwtMy42NzIgbCAzNi44NTksMCAyLjc4MSwxNy4yODEgLTIuNDg0LDAgYyAtMC41LC0yLjk4NCAtMS4yMDMsLTcuMzQzIC0yLjE4NywtOC44NDMgLTAuNzA0LC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDM4LC0wLjc4MiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg4NS44NTksMzY4Ljc2NiBjIC0xLjczNCwtMS41NzggLTcuMDQ2LC02LjYxIC03LjA0NiwtOC42MjUgMCwtMS40MzggMS4yOTYsLTIuNzE5IDIuNzM0LC0yLjcxOSAxLjI5NywwIDEuODc1LDAuODU5IDIuODc1LDIuMjk3IDMuNDUzLDQuMjk3IDcuMzI4LDcuMDMxIDEwLjYyNSw4LjkwNiAxLjQzNywwLjg1OSAyLjQ1MywxLjI4MSAyLjQ1MywyLjg3NSAwLDEuMjgxIC0xLjE1NiwyIC0yLjAxNiwyLjcxOSAtNC4wMzEsMi43MzQgLTUuMDMxLDYuNjA5IC01LjQ2OCw4LjMyOCAtMC40MjIsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODc1LDAgLTIuNTkzLC0wLjU2MyAtMi41OTMsLTIuNzE5IDAsLTEuMjk3IDAuODU5LC00Ljc1IDMuNTkzLC04LjYyNSBsIC00OC4yNjUsMCBjIC0yLjQ1MywwIC00Ljg5MSwwIC00Ljg5MSwtMi43MzQgMCwtMi41NzggMi41OTQsLTIuNTc4IDQuODkxLC0yLjU3OCBsIDQ1Ljk2OCwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODgwLjY1NiwzMzYuNzM0IGMgMCw5LjA0NyAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MyAtNi42MDksLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTc4LC0zLjI5NyAxLjQzOCwtMS4yOTYgNS4xNzIsLTUuMTcxIDUuMTcyLC0xMi42NTYgMCwtNi4wMzEgLTguNjI1LC0zOS42NCAtMjUuODU5LC0zOS42NCAtOC43NjYsMCAtMTAuNDg1LDcuMzI4IC0xMC40ODUsMTIuNjQgMCw3LjE4OCAzLjI5NywxNy4yMzUgNy4xODgsMjcuNTc4IDIuMjk3LDUuODkxIDIuODc1LDcuMzI4IDIuODc1LDEwLjIwMyAwLDYuMDMyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDMgLTE4LjUzMSwtMjEuOTg0IDAsLTAuNTc4IDAuNTc4LC0xLjI5NyAxLjU3OCwtMS4yOTcgMS4yOTcsMCAxLjQzOCwwLjU3OCAyLjAxNiwyLjU5NCAzLjQ1MywxMi4zNDQgOS4wNDcsMTcuODEyIDE0LjUxNSwxNy44MTIgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0IC0xLjU3OCwtNy44OSAtMy43MzUsLTEzLjM1OSAtNi45MDYsLTE4LjM5MSAtNi45MDYsLTIyLjg0NCAtNi45MDYsLTI2LjI4MSAwLC0zLjE3MiAwLjQzOCwtOS4wNDcgNC44OTEsLTEzLjA3OCA1LjE3MiwtNC40NTMgMTIuMzU5LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNDcsNDYuOTg0IDMyLjA0Nyw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4OTUuNjA5LDI2OS42NTYgMTAuNTMyLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ2OCwxOS4wNzggMjEuNDY4LDI5LjAxNiAwLDExLjMyOCAtOC45NTMsMTkuMjY1IC0yMS4wNjIsMTkuMjY1IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk2OSwtNS41NjMgNS4yNjUsLTUuNTYzIDEuNjg4LDAgNS4xNTcsMS4yMDQgNS4xNTcsNS4yNjYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDcgMTMuMzEzLC0xNi4xODcgMCwtNy45NTMgLTQuOTY5LC0xNS43OTcgLTEwLjQzOCwtMjEuOTUzIGwgLTE5LjA2MiwtMjEuMjY2IGMgLTEuMDk0LC0xLjA5NCAtMS4wOTQsLTEuMjgxIC0xLjA5NCwtMy42NzIgbCAzNi44NTksMCAyLjc4MSwxNy4yODEgLTIuNDg0LDAgYyAtMC41LC0yLjk4NCAtMS4yMDMsLTcuMzQzIC0yLjE4NywtOC44NDMgLTAuNzA0LC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDM4LC0wLjc4MiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMjcuMzEsMzE2LjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4IDAsLTIuNzM0IDIuNDUzLC0yLjczNCA0LjYwOSwtMi43MzQgbCAzOS42NDEsMCAwLC0zOS42NTcgYyAwLC0yIDAsLTQuNTkzIDIuNTksLTQuNTkzIDIuNzIsMCAyLjcyLDIuNDM3IDIuNzIsNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExMzYuNDQsMjg5Ljg5MSBjIDAsNC4xNzIgLTMuNDYsNy4wNDcgLTYuOTEsNy4wNDcgLTQuMTUsMCAtNy4wMywtMy40NTQgLTcuMDMsLTYuODkxIDAsLTQuMTcyIDMuNDUsLTcuMDQ3IDYuODksLTcuMDQ3IDQuMTcsMCA3LjA1LDMuNDUzIDcuMDUsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg0NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjAwLjQ0LDI4OS44OTEgYyAwLDQuMTcyIC0zLjQ2LDcuMDQ3IC02LjkxLDcuMDQ3IC00LjE1LDAgLTcuMDMsLTMuNDU0IC03LjAzLC02Ljg5MSAwLC00LjE3MiAzLjQ1LC03LjA0NyA2Ljg5LC03LjA0NyA0LjE3LDAgNy4wNSwzLjQ1MyA3LjA1LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTI2My40NCwyODkuODkxIGMgMCw0LjE3MiAtMy40Niw3LjA0NyAtNi45MSw3LjA0NyAtNC4xNSwwIC03LjAzLC0zLjQ1NCAtNy4wMywtNi44OTEgMCwtNC4xNzIgMy40NSwtNy4wNDcgNi44OSwtNy4wNDcgNC4xNywwIDcuMDUsMy40NTMgNy4wNSw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEzNjQuMzEsMzE2LjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCAzOS42NCwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OSwtNC41OTMgMi43MiwwIDIuNzIsMi40MzcgMi43Miw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQ5MS4yMywzMDAuMDk0IGMgLTAuNzEsLTIuNDM4IC0wLjcxLC0yLjczNSAtMi43MSwtNS40NTMgLTMuMTgsLTQuMDMyIC05LjQ5LC0xMC4yMDMgLTE2LjI0LC0xMC4yMDMgLTUuODksMCAtOS4yLDUuMzEyIC05LjIsMTMuNzk2IDAsNy44OTEgNC40NSwyMy45ODUgNy4xOSwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzLDE1LjIzNCA5LjQ4LDAgMTEuMzYsLTExLjc4MSAxMS4zNiwtMTIuOTM3IDAsLTAuMTQxIC0wLjQ0LC0yIC0wLjU4LC0yLjI5NyBsIC03LjA1LC0yOC4xNTYgeiBtIDkuMjEsMzYuNzgxIGMgLTEuNTgsMy43MzQgLTUuNDcsOS40ODQgLTEyLjk0LDkuNDg0IC0xNi4yMywwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMzLC0yMi41NjIgMTguMDksLTIyLjU2MiA3LjkxLDAgMTQuNjYsNi4xNzEgMTguNjgsMTAuOTIxIDEuNDMsLTguNDg0IDguMTgsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMSwwIDcuNzYsMi41OTMgMTAuMzQsNy43NjUgMi4zLDQuODc1IDQuMzEsMTMuNjQxIDQuMzEsMTQuMjE5IDAsMC43MTkgLTAuNTgsMS4yODEgLTEuNDQsMS4yODEgLTEuMjksMCAtMS40MywtMC43MDMgLTIuMDEsLTIuODU5IC0yLjE0LC04LjQ4NSAtNC44OCwtMTcuNTMxIC0xMC43NywtMTcuNTMxIC00LjE3LDAgLTQuNDUsMy43MzQgLTQuNDUsNi42MDkgMCwzLjI5NyAwLjQyLDQuODc1IDEuNzIsMTAuNDg0IDEuMDEsMy41OTQgMS43Myw2Ljc1IDIuODcsMTAuOTIyIDUuMzIsMjEuNTQ3IDYuNjEsMjYuNzE5IDYuNjEsMjcuNTc4IDAsMi4wMTYgLTEuNTcsMy41OTQgLTMuNzMsMy41OTQgLTQuNTksMCAtNS43NSwtNS4wMzEgLTYuMDMsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNTUwLjUyLDMyOS44NDQgYyAwLDAuMTA5IDAsMS4wOTQgLTEuMywxLjA5NCAtMi4yOCwwIC05LjUzLC0wLjc5NyAtMTIuMTMsLTAuOTg1IC0wLjc5LC0wLjEwOSAtMS44NywtMC4yMDMgLTEuODcsLTIgMCwtMS4xODcgMC44OSwtMS4xODcgMi4zNywtMS4xODcgNC43NywwIDQuOTcsLTAuNjg4IDQuOTcsLTEuNjg4IGwgLTAuMjksLTEuOTg0IC0xNC40MSwtNTcuMjE5IGMgLTAuMzksLTEuMzkxIC0wLjM5LC0xLjU5NCAtMC4zOSwtMi4xODcgMCwtMi4yODIgMS45OCwtMi43ODIgMi44NywtMi43ODIgMS4zLDAgMi43OSwwLjg5MSAzLjM4LDIuMDk0IDAuNSwwLjg5MSA0Ljk3LDE5LjI2NiA1LjU2LDIxLjc1IDMuMzgsLTAuMjk3IDExLjUzLC0xLjg5MSAxMS41MywtOC40NTMgMCwtMC42ODggMCwtMS4wNzggLTAuMjksLTIuMDc4IC0wLjIxLC0xLjE4OCAtMC40MSwtMi4zOTEgLTAuNDEsLTMuNDg1IDAsLTUuODU5IDMuOTcsLTkuODI4IDkuMTQsLTkuODI4IDIuOTgsMCA1LjY2LDEuNTk0IDcuODQsNS4yNjYgMi40OSw0LjM3NSAzLjU4LDkuODI4IDMuNTgsMTAuMDMxIDAsMSAtMC44OSwxIC0xLjE5LDEgLTEsMCAtMS4wOSwtMC40MDYgLTEuMzksLTEuNzk3IC0xLjk4LC03LjI1IC00LjI2LC0xMi4zMTIgLTguNjQsLTEyLjMxMiAtMS44OSwwIC0zLjE4LDEuMDk0IC0zLjE4LDQuNjcyIDAsMS42ODcgMC40LDMuOTY4IDAuNzksNS41NjIgMC40MSwxLjY4OCAwLjQxLDIuMDc4IDAuNDEsMy4wNzggMCw2LjQ1MyAtNi4yNyw5LjMyOCAtMTQuNywxMC40MjIgMy4wNywxLjc5NyA2LjI1LDQuOTY5IDguNTMsNy4zNiA0Ljc4LDUuMjY1IDkuMzQsOS41MzEgMTQuMjIsOS41MzEgMC41OSwwIDAuNjgsMCAwLjg5LC0wLjA5NCAxLjE4LC0wLjIwMyAxLjI4LC0wLjIwMyAyLjA3LC0wLjc5NyAwLjIxLC0wLjA5NCAwLjIxLC0wLjIwMyAwLjQxLC0wLjM5IC00Ljc2LC0wLjMxMyAtNS42NywtNC4xNzIgLTUuNjcsLTUuMzc1IDAsLTEuNTc5IDEuMDksLTMuNDY5IDMuNzgsLTMuNDY5IDIuNTgsMCA1LjQ3LDIuMTg3IDUuNDcsNi4wNjIgMCwyLjk2OSAtMi4zLDYuMjUgLTYuNzcsNi4yNSAtMi43OCwwIC03LjM0LC0wLjc5NyAtMTQuNSwtOC43MzQgLTMuMzcsLTMuNzgxIC03LjI1LC03Ljc1IC0xMS4wMywtOS4yNSBsIDEwLjM1LDQxLjkyMiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE2NTMuODYsMzY4Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTY0Ny42NiwzMzYuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTY3OC41MiwzMjkuODQ0IGMgMCwwLjEwOSAwLDEuMDk0IC0xLjMsMS4wOTQgLTIuMjgsMCAtOS41MywtMC43OTcgLTEyLjEzLC0wLjk4NSAtMC43OSwtMC4xMDkgLTEuODcsLTAuMjAzIC0xLjg3LC0yIDAsLTEuMTg3IDAuODksLTEuMTg3IDIuMzcsLTEuMTg3IDQuNzcsMCA0Ljk3LC0wLjY4OCA0Ljk3LC0xLjY4OCBsIC0wLjI5LC0xLjk4NCAtMTQuNDEsLTU3LjIxOSBjIC0wLjM5LC0xLjM5MSAtMC4zOSwtMS41OTQgLTAuMzksLTIuMTg3IDAsLTIuMjgyIDEuOTgsLTIuNzgyIDIuODcsLTIuNzgyIDEuMywwIDIuNzksMC44OTEgMy4zOCwyLjA5NCAwLjUsMC44OTEgNC45NywxOS4yNjYgNS41NiwyMS43NSAzLjM4LC0wLjI5NyAxMS41MywtMS44OTEgMTEuNTMsLTguNDUzIDAsLTAuNjg4IDAsLTEuMDc4IC0wLjI5LC0yLjA3OCAtMC4yMSwtMS4xODggLTAuNDEsLTIuMzkxIC0wLjQxLC0zLjQ4NSAwLC01Ljg1OSAzLjk3LC05LjgyOCA5LjE0LC05LjgyOCAyLjk4LDAgNS42NiwxLjU5NCA3Ljg0LDUuMjY2IDIuNDksNC4zNzUgMy41OCw5LjgyOCAzLjU4LDEwLjAzMSAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEuMDksLTAuNDA2IC0xLjM5LC0xLjc5NyAtMS45OCwtNy4yNSAtNC4yNiwtMTIuMzEyIC04LjY0LC0xMi4zMTIgLTEuODksMCAtMy4xOCwxLjA5NCAtMy4xOCw0LjY3MiAwLDEuNjg3IDAuNCwzLjk2OCAwLjc5LDUuNTYyIDAuNDEsMS42ODggMC40MSwyLjA3OCAwLjQxLDMuMDc4IDAsNi40NTMgLTYuMjcsOS4zMjggLTE0LjcsMTAuNDIyIDMuMDcsMS43OTcgNi4yNSw0Ljk2OSA4LjUzLDcuMzYgNC43OCw1LjI2NSA5LjM0LDkuNTMxIDE0LjIyLDkuNTMxIDAuNTksMCAwLjY4LDAgMC44OSwtMC4wOTQgMS4xOCwtMC4yMDMgMS4yOCwtMC4yMDMgMi4wNywtMC43OTcgMC4yMSwtMC4wOTQgMC4yMSwtMC4yMDMgMC40MSwtMC4zOSAtNC43NiwtMC4zMTMgLTUuNjcsLTQuMTcyIC01LjY3LC01LjM3NSAwLC0xLjU3OSAxLjA5LC0zLjQ2OSAzLjc4LC0zLjQ2OSAyLjU4LDAgNS40NywyLjE4NyA1LjQ3LDYuMDYyIDAsMi45NjkgLTIuMyw2LjI1IC02Ljc3LDYuMjUgLTIuNzgsMCAtNy4zNCwtMC43OTcgLTE0LjUsLTguNzM0IC0zLjM3LC0zLjc4MSAtNy4yNSwtNy43NSAtMTEuMDMsLTkuMjUgbCAxMC4zNSw0MS45MjIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzM4LjAyLDI4Mi40MjIgYyAwLDguMzI4IC0yLjc0LDE0LjUxNiAtOC42MywxNC41MTYgLTQuNTksMCAtNi44OSwtMy43MzUgLTYuODksLTYuODkxIDAsLTMuMTcyIDIuMTYsLTcuMDQ3IDcuMDMsLTcuMDQ3IDEuODgsMCAzLjQ1LDAuNTc4IDQuNzUsMS44NzUgMC4yOCwwLjI4MSAwLjQyLDAuMjgxIDAuNTgsMC4yODEgMC4yOCwwIDAuMjgsLTIuMDE1IDAuMjgsLTIuNzM0IDAsLTQuNzM0IC0wLjg2LC0xNC4wNzggLTkuMTksLTIzLjQwNiAtMS41OSwtMS43MzUgLTEuNTksLTIuMDE2IC0xLjU5LC0yLjMxMyAwLC0wLjcwMyAwLjcyLC0xLjQyMiAxLjQ0LC0xLjQyMiAxLjE1LDAgMTIuMjIsMTAuNjI1IDEyLjIyLDI3LjE0MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4OTEuMjMsMzAwLjA5NCBjIC0wLjcxLC0yLjQzOCAtMC43MSwtMi43MzUgLTIuNzEsLTUuNDUzIC0zLjE4LC00LjAzMiAtOS40OSwtMTAuMjAzIC0xNi4yNCwtMTAuMjAzIC01Ljg5LDAgLTkuMiw1LjMxMiAtOS4yLDEzLjc5NiAwLDcuODkxIDQuNDUsMjMuOTg1IDcuMTksMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMywxNS4yMzQgOS40OCwwIDExLjM2LC0xMS43ODEgMTEuMzYsLTEyLjkzNyAwLC0wLjE0MSAtMC40NCwtMiAtMC41OCwtMi4yOTcgbCAtNy4wNSwtMjguMTU2IHogbSA5LjIxLDM2Ljc4MSBjIC0xLjU4LDMuNzM0IC01LjQ3LDkuNDg0IC0xMi45NCw5LjQ4NCAtMTYuMjMsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMywtMjIuNTYyIDE4LjA5LC0yMi41NjIgNy45MSwwIDE0LjY2LDYuMTcxIDE4LjY4LDEwLjkyMSAxLjQzLC04LjQ4NCA4LjE4LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEsMCA3Ljc2LDIuNTkzIDEwLjM0LDcuNzY1IDIuMyw0Ljg3NSA0LjMxLDEzLjY0MSA0LjMxLDE0LjIxOSAwLDAuNzE5IC0wLjU4LDEuMjgxIC0xLjQ0LDEuMjgxIC0xLjI5LDAgLTEuNDMsLTAuNzAzIC0yLjAxLC0yLjg1OSAtMi4xNCwtOC40ODUgLTQuODgsLTE3LjUzMSAtMTAuNzcsLTE3LjUzMSAtNC4xNywwIC00LjQ1LDMuNzM0IC00LjQ1LDYuNjA5IDAsMy4yOTcgMC40Miw0Ljg3NSAxLjcyLDEwLjQ4NCAxLjAxLDMuNTk0IDEuNzMsNi43NSAyLjg3LDEwLjkyMiA1LjMyLDIxLjU0NyA2LjYxLDI2LjcxOSA2LjYxLDI3LjU3OCAwLDIuMDE2IC0xLjU3LDMuNTk0IC0zLjczLDMuNTk0IC00LjU5LDAgLTUuNzUsLTUuMDMxIC02LjAzLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTk1MC4yLDMyNS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgsMi41NzggLTYuMTUsLTYuMzU5IC0xNC45LC02LjM1OSAtMTguMDgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk5LDAgNy44NSwwIDEzLjAyLDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMywtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcsMCAwLC0zLjA3OCBjIDMuNDcsMC4yOTcgMTIuMTIsMC4yOTcgMTYuMDksMC4yOTcgMy45NywwIDEyLjYxLDAgMTYuMSwtMC4yOTcgbCAwLDMuMDc4IC0zLjE5LDAgYyAtOC45NCwwIC05LjI0LDEuMDk0IC05LjI0LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDA2LjAyLDI4Mi40MjIgYyAwLDguMzI4IC0yLjc0LDE0LjUxNiAtOC42MywxNC41MTYgLTQuNTksMCAtNi44OSwtMy43MzUgLTYuODksLTYuODkxIDAsLTMuMTcyIDIuMTYsLTcuMDQ3IDcuMDMsLTcuMDQ3IDEuODgsMCAzLjQ1LDAuNTc4IDQuNzUsMS44NzUgMC4yOCwwLjI4MSAwLjQyLDAuMjgxIDAuNTgsMC4yODEgMC4yOCwwIDAuMjgsLTIuMDE1IDAuMjgsLTIuNzM0IDAsLTQuNzM0IC0wLjg2LC0xNC4wNzggLTkuMTksLTIzLjQwNiAtMS41OSwtMS43MzUgLTEuNTksLTIuMDE2IC0xLjU5LC0yLjMxMyAwLC0wLjcwMyAwLjcyLC0xLjQyMiAxLjQ0LC0xLjQyMiAxLjE1LDAgMTIuMjIsMTAuNjI1IDEyLjIyLDI3LjE0MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDcwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwNjcuNDQsMjg5Ljg5MSBjIDAsNC4xNzIgLTMuNDYsNy4wNDcgLTYuOTEsNy4wNDcgLTQuMTUsMCAtNy4wMywtMy40NTQgLTcuMDMsLTYuODkxIDAsLTQuMTcyIDMuNDUsLTcuMDQ3IDYuODksLTcuMDQ3IDQuMTcsMCA3LjA1LDMuNDUzIDcuMDUsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMTMxLjQ0LDI4OS44OTEgYyAwLDQuMTcyIC0zLjQ2LDcuMDQ3IC02LjkxLDcuMDQ3IC00LjE1LDAgLTcuMDMsLTMuNDU0IC03LjAzLC02Ljg5MSAwLC00LjE3MiAzLjQ1LC03LjA0NyA2Ljg5LC03LjA0NyA0LjE3LDAgNy4wNSwzLjQ1MyA3LjA1LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjE5NC40NCwyODkuODkxIGMgMCw0LjE3MiAtMy40Niw3LjA0NyAtNi45MSw3LjA0NyAtNC4xNSwwIC03LjAzLC0zLjQ1NCAtNy4wMywtNi44OTEgMCwtNC4xNzIgMy40NSwtNy4wNDcgNi44OSwtNy4wNDcgNC4xNywwIDcuMDUsMy40NTMgNy4wNSw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIyNTYuMDIsMjgyLjQyMiBjIDAsOC4zMjggLTIuNzQsMTQuNTE2IC04LjYzLDE0LjUxNiAtNC41OSwwIC02Ljg5LC0zLjczNSAtNi44OSwtNi44OTEgMCwtMy4xNzIgMi4xNiwtNy4wNDcgNy4wMywtNy4wNDcgMS44OCwwIDMuNDUsMC41NzggNC43NSwxLjg3NSAwLjI4LDAuMjgxIDAuNDIsMC4yODEgMC41OCwwLjI4MSAwLjI4LDAgMC4yOCwtMi4wMTUgMC4yOCwtMi43MzQgMCwtNC43MzQgLTAuODYsLTE0LjA3OCAtOS4xOSwtMjMuNDA2IC0xLjU5LC0xLjczNSAtMS41OSwtMi4wMTYgLTEuNTksLTIuMzEzIDAsLTAuNzAzIDAuNzIsLTEuNDIyIDEuNDQsLTEuNDIyIDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjMzNS4yMywzMDAuMDk0IGMgLTAuNzEsLTIuNDM4IC0wLjcxLC0yLjczNSAtMi43MSwtNS40NTMgLTMuMTgsLTQuMDMyIC05LjQ5LC0xMC4yMDMgLTE2LjI0LC0xMC4yMDMgLTUuODksMCAtOS4yLDUuMzEyIC05LjIsMTMuNzk2IDAsNy44OTEgNC40NSwyMy45ODUgNy4xOSwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzLDE1LjIzNCA5LjQ4LDAgMTEuMzYsLTExLjc4MSAxMS4zNiwtMTIuOTM3IDAsLTAuMTQxIC0wLjQ0LC0yIC0wLjU4LC0yLjI5NyBsIC03LjA1LC0yOC4xNTYgeiBtIDkuMjEsMzYuNzgxIGMgLTEuNTgsMy43MzQgLTUuNDcsOS40ODQgLTEyLjk0LDkuNDg0IC0xNi4yMywwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMzLC0yMi41NjIgMTguMDksLTIyLjU2MiA3LjkxLDAgMTQuNjYsNi4xNzEgMTguNjgsMTAuOTIxIDEuNDMsLTguNDg0IDguMTgsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMSwwIDcuNzYsMi41OTMgMTAuMzQsNy43NjUgMi4zLDQuODc1IDQuMzEsMTMuNjQxIDQuMzEsMTQuMjE5IDAsMC43MTkgLTAuNTgsMS4yODEgLTEuNDQsMS4yODEgLTEuMjksMCAtMS40MywtMC43MDMgLTIuMDEsLTIuODU5IC0yLjE0LC04LjQ4NSAtNC44OCwtMTcuNTMxIC0xMC43NywtMTcuNTMxIC00LjE3LDAgLTQuNDUsMy43MzQgLTQuNDUsNi42MDkgMCwzLjI5NyAwLjQyLDQuODc1IDEuNzIsMTAuNDg0IDEuMDEsMy41OTQgMS43Myw2Ljc1IDIuODcsMTAuOTIyIDUuMzIsMjEuNTQ3IDYuNjEsMjYuNzE5IDYuNjEsMjcuNTc4IDAsMi4wMTYgLTEuNTcsMy41OTQgLTMuNzMsMy41OTQgLTQuNTksMCAtNS43NSwtNS4wMzEgLTYuMDMsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMzkzLjUyLDMyOS44NDQgYyAwLDAuMTA5IDAsMS4wOTQgLTEuMywxLjA5NCAtMi4yOCwwIC05LjUzLC0wLjc5NyAtMTIuMTMsLTAuOTg1IC0wLjc5LC0wLjEwOSAtMS44NywtMC4yMDMgLTEuODcsLTIgMCwtMS4xODcgMC44OSwtMS4xODcgMi4zNywtMS4xODcgNC43NywwIDQuOTcsLTAuNjg4IDQuOTcsLTEuNjg4IGwgLTAuMjksLTEuOTg0IC0xNC40MSwtNTcuMjE5IGMgLTAuMzksLTEuMzkxIC0wLjM5LC0xLjU5NCAtMC4zOSwtMi4xODcgMCwtMi4yODIgMS45OCwtMi43ODIgMi44NywtMi43ODIgMS4zLDAgMi43OSwwLjg5MSAzLjM4LDIuMDk0IDAuNSwwLjg5MSA0Ljk3LDE5LjI2NiA1LjU2LDIxLjc1IDMuMzgsLTAuMjk3IDExLjUzLC0xLjg5MSAxMS41MywtOC40NTMgMCwtMC42ODggMCwtMS4wNzggLTAuMjksLTIuMDc4IC0wLjIxLC0xLjE4OCAtMC40MSwtMi4zOTEgLTAuNDEsLTMuNDg1IDAsLTUuODU5IDMuOTcsLTkuODI4IDkuMTQsLTkuODI4IDIuOTgsMCA1LjY2LDEuNTk0IDcuODQsNS4yNjYgMi40OSw0LjM3NSAzLjU4LDkuODI4IDMuNTgsMTAuMDMxIDAsMSAtMC44OSwxIC0xLjE5LDEgLTEsMCAtMS4wOSwtMC40MDYgLTEuMzksLTEuNzk3IC0xLjk4LC03LjI1IC00LjI2LC0xMi4zMTIgLTguNjQsLTEyLjMxMiAtMS44OSwwIC0zLjE4LDEuMDk0IC0zLjE4LDQuNjcyIDAsMS42ODcgMC40LDMuOTY4IDAuNzksNS41NjIgMC40MSwxLjY4OCAwLjQxLDIuMDc4IDAuNDEsMy4wNzggMCw2LjQ1MyAtNi4yNyw5LjMyOCAtMTQuNywxMC40MjIgMy4wNywxLjc5NyA2LjI1LDQuOTY5IDguNTMsNy4zNiA0Ljc4LDUuMjY1IDkuMzQsOS41MzEgMTQuMjIsOS41MzEgMC41OSwwIDAuNjgsMCAwLjg5LC0wLjA5NCAxLjE4LC0wLjIwMyAxLjI4LC0wLjIwMyAyLjA3LC0wLjc5NyAwLjIxLC0wLjA5NCAwLjIxLC0wLjIwMyAwLjQxLC0wLjM5IC00Ljc2LC0wLjMxMyAtNS42NywtNC4xNzIgLTUuNjcsLTUuMzc1IDAsLTEuNTc5IDEuMDksLTMuNDY5IDMuNzgsLTMuNDY5IDIuNTgsMCA1LjQ3LDIuMTg3IDUuNDcsNi4wNjIgMCwyLjk2OSAtMi4zLDYuMjUgLTYuNzcsNi4yNSAtMi43OCwwIC03LjM0LC0wLjc5NyAtMTQuNSwtOC43MzQgLTMuMzcsLTMuNzgxIC03LjI1LC03Ljc1IC0xMS4wMywtOS4yNSBsIDEwLjM1LDQxLjkyMiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1NDMuNzIsMzE2LjA0NyBjIDIuNDUsMCA1LjAzLDAgNS4wMywyLjg3NSAwLDIuODU5IC0yLjU4LDIuODU5IC01LjAzLDIuODU5IGwgLTYwLjkxLDAgYyAxLjcyLDE5LjI1IDE4LjI1LDMzLjA0NyAzOC41LDMzLjA0NyBsIDIyLjQxLDAgYyAyLjQ1LDAgNS4wMywwIDUuMDMsMi44NzUgMCwyLjg3NSAtMi41OCwyLjg3NSAtNS4wMywyLjg3NSBsIC0yMi42OSwwIGMgLTI0LjU4LDAgLTQ0LjExLC0xOC42NzIgLTQ0LjExLC00MS42NTYgMCwtMjMgMTkuNTMsLTQxLjY3MiA0NC4xMSwtNDEuNjcyIGwgMjIuNjksMCBjIDIuNDUsMCA1LjAzLDAgNS4wMywyLjg3NSAwLDIuODc1IC0yLjU4LDIuODc1IC01LjAzLDIuODc1IGwgLTIyLjQxLDAgYyAtMjAuMjUsMCAtMzYuNzgsMTMuNzk3IC0zOC41LDMzLjA0NyBsIDYwLjkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNjM4LjUsMzI4LjEwOSA1LjE3LDAgMjEuNTUsLTMzLjMyOCBjIDEuNDQsLTIuMjk3IDQuODksLTcuOTA2IDYuNDcsLTEwLjA2MiAxLC0xLjcxOSAxLjQ0LC0xLjcxOSA0LjczLC0xLjcxOSBsIDE5LjgzLDAgYyAyLjU4LDAgNC43MywwIDQuNzMsMi41NzggMCwxLjE1NiAtMC44NSwyLjE1NiAtMi4xNSwyLjQ1MyAtNS4zMSwxLjE0MSAtMTIuMzUsMTAuNjI1IC0xNS44LDE1LjIxOSAtMSwxLjQzOCAtOC4xOSwxMC45MjIgLTE3LjgxLDI2LjQzOCAxMi43OCwyLjI5NiAyNS4xNCw3Ljc2NSAyNS4xNCwyNC44NTkgMCwxOS45NjkgLTIxLjExLDI2Ljg1OSAtMzguMDYsMjYuODU5IGwgLTQ1LjExLDAgYyAtMi42LDAgLTQuODksMCAtNC44OSwtMi41OTMgMCwtMi40MzggMi43MywtMi40MzggMy44NywtMi40MzggOC4xOSwwIDguOTEsLTEgOC45MSwtOC4xODcgbCAwLC03MS45NjkgYyAwLC03LjE4OCAtMC43MiwtOC4xODggLTguOTEsLTguMTg4IC0xLjE0LDAgLTMuODcsMCAtMy44NywtMi40NTMgMCwtMi41NzggMi4yOSwtMi41NzggNC44OSwtMi41NzggbCAzOS4zNiwwIGMgMi41OCwwIDQuNzMsMCA0LjczLDIuNTc4IDAsMi40NTMgLTIuNDQsMi40NTMgLTQuMDEsMi40NTMgLTguMTksMCAtOC43NywxLjE0MSAtOC43Nyw4LjE4OCBsIDAsMzEuODkgeiBtIDI3LjcyLDcuMDMyIGMgNC4wMyw1LjMyOCA0LjQ1LDEyLjkzNyA0LjQ1LDE5LjI1IDAsNi45MDYgLTAuODYsMTQuNTE1IC01LjQ1LDIwLjQwNiA1Ljg5LC0xLjI5NyAyMC4xMSwtNS43NSAyMC4xMSwtMjAuMjUgMCwtOS4zNDQgLTQuMzEsLTE2LjY3MiAtMTkuMTEsLTE5LjQwNiB6IG0gLTI3LjcyLDMzLjQ4NCBjIDAsMy4wMTYgMCw3Ljc1IDguOTEsNy43NSAxMi4yMiwwIDE4LjI1LC01LjAzMSAxOC4yNSwtMjEuOTg0IDAsLTE4LjUzMiAtNC40NiwtMjEuMjUgLTI3LjE2LC0yMS4yNSBsIDAsMzUuNDg0IHogbSAtMTkuNTMsLTgwLjU5NCBjIDEuMTQsMi41NzggMS4xNCw2LjYxIDEuMTQsNy44OTEgbCAwLDcyLjU0NyBjIDAsMS40MzcgMCw1LjMyOCAtMS4xNCw3LjkwNiBsIDE2LjM3LDAgYyAtMS44NywtMi4yOTcgLTEuODcsLTUuMTcyIC0xLjg3LC03LjMyOCBsIDAsLTczLjEyNSBjIDAsLTEuNDIyIDAsLTUuMzEzIDEuMTYsLTcuODkxIGwgLTE1LjY2LDAgeiBtIDMwLjU5LDQwLjA3OCBjIDEsMC4xNDEgMS41OCwwLjI4MiAyLjc0LDAuMjgyIDIuMTUsMCA1LjMxLDAuMjk3IDcuNDcsMC41NzggMi4xNSwtMy40NTMgMTcuNjcsLTI5LjAxNiAyOS41OSwtNDAuOTM4IGwgLTEzLjk0LDAgLTI1Ljg2LDQwLjA3OCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDg2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI3MzIuMDIsMjgyLjQyMiBjIDAsOC4zMjggLTIuNzQsMTQuNTE2IC04LjYzLDE0LjUxNiAtNC41OSwwIC02Ljg5LC0zLjczNSAtNi44OSwtNi44OTEgMCwtMy4xNzIgMi4xNiwtNy4wNDcgNy4wMywtNy4wNDcgMS44OCwwIDMuNDUsMC41NzggNC43NSwxLjg3NSAwLjI4LDAuMjgxIDAuNDIsMC4yODEgMC41OCwwLjI4MSAwLjI4LDAgMC4yOCwtMi4wMTUgMC4yOCwtMi43MzQgMCwtNC43MzQgLTAuODYsLTE0LjA3OCAtOS4xOSwtMjMuNDA2IC0xLjU5LC0xLjczNSAtMS41OSwtMi4wMTYgLTEuNTksLTIuMzEzIDAsLTAuNzAzIDAuNzIsLTEuNDIyIDEuNDQsLTEuNDIyIDEuMTUsMCAxMi4yMiwxMC42MjUgMTIuMjIsMjcuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTkuODU5NCwxNTguNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40Mzc1LDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYyLDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDMyLjE4NzUsMTMxLjEwOSBjIDAuMTQwNiwwLjU3OSAwLjQyMTksMS40MzggMC40MjE5LDIuMTU3IDAsMS40MzcgLTEuNDM3NSwxLjQzNyAtMS43MTg4LDEuNDM3IC0wLjE0MDYsMCAtNS4zMTI1LC0wLjQzNyAtNy45MDYyLC0wLjcxOSAtMi40Mzc1LC0wLjE1NiAtNC41OTM4LC0wLjQzNyAtNy4xNzE5LC0wLjU3OCAtMy40NTMxLC0wLjI4MSAtNC40NTMxLC0wLjQzNyAtNC40NTMxLC0zLjAxNSAwLC0xLjQzOCAxLjQzNzUsLTEuNDM4IDIuODc1LC0xLjQzOCA3LjMxMjUsMCA3LjMxMjUsLTEuMjk3IDcuMzEyNSwtMi43MzQgMCwtMSAtMS4xNDA2LC01LjE3MiAtMS43MTg4LC03Ljc1IEwgMTYuMzc1LDEwNC42NzIgQyAxNC45NTMxLDk4LjkyMTkgNi43NSw2Ni4zMTI1IDYuMTg3NSw2My43MzQ0IDUuNDY4NzUsNjAuMTQwNiA1LjQ2ODc1LDU3LjcwMzEgNS40Njg3NSw1NS44MjgxIGMgMCwtMTQuNjU2MiA4LjE4NzU1LC0yMi4yNjU2IDE3LjUxNTY1LC0yMi4yNjU2IDE2LjY3MTksMCAzMy45MDYyLDIxLjQwNjMgMzMuOTA2Miw0Mi4yMzQ0IDAsMTMuMjE4NyAtNy40Njg3LDIyLjU2MjUgLTE4LjIzNDMsMjIuNTYyNSAtNy40ODQ0LDAgLTE0LjIzNDQsLTYuMTg3NSAtMTYuOTUzMiwtOS4wNjI1IEwgMzIuMTg3NSwxMzEuMTA5IFogTSAyMy4xNDA2LDM2LjQzNzUgYyAtNC42MDkzLDAgLTkuNjI1LDMuNDUzMSAtOS42MjUsMTQuNjU2MyAwLDQuNzM0MyAwLjQyMTksNy40Njg3IDMuMDE1NywxNy41MTU2IDAuNDIxOCwxLjg3NSAyLjcxODcsMTEuMDYyNSAzLjI5NjgsMTIuOTM3NSAwLjI5NjksMS4xNDA2IDguNzY1NywxMy45Mzc1IDE4LjUzMTMsMTMuOTM3NSA2LjMyODEsMCA5LjIwMzEsLTYuMzI4MSA5LjIwMzEsLTEzLjc5NjkgMCwtNi44OTA2IC00LjAzMTIsLTIzLjEyNSAtNy42MjUsLTMwLjU5MzcgQyAzNi4zNDM4LDQzLjMyODEgMjkuNzUsMzYuNDM3NSAyMy4xNDA2LDM2LjQzNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTQuOTY5LDgxLjU0NjkgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzgxIDAsMi43MzQ0IC0yLjQzOCwyLjczNDQgLTQuNTk0LDIuNzM0NCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3ODEgMCwtMi43MzQ0IDIuNDUzLC0yLjczNDQgNC42MDksLTIuNzM0NCBsIDg0LjYxLDAgeiBtIDAsLTI2LjcxODggYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzgyIDAsMi43MzQzIC0yLjQzOCwyLjczNDMgLTQuNTk0LDIuNzM0MyBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5MzcgMCwtMi43MTg4IDIuNDUzLC0yLjcxODggNC42MDksLTIuNzE4OCBsIDg0LjYxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyODEuMTg4LDEzMS4xMDkgYyAwLjE0LDAuNTc5IDAuNDIxLDEuNDM4IDAuNDIxLDIuMTU3IDAsMS40MzcgLTEuNDM3LDEuNDM3IC0xLjcxOCwxLjQzNyAtMC4xNDEsMCAtNS4zMTMsLTAuNDM3IC03LjkwNywtMC43MTkgLTIuNDM3LC0wLjE1NiAtNC41OTMsLTAuNDM3IC03LjE3MSwtMC41NzggLTMuNDU0LC0wLjI4MSAtNC40NTQsLTAuNDM3IC00LjQ1NCwtMy4wMTUgMCwtMS40MzggMS40MzgsLTEuNDM4IDIuODc1LC0xLjQzOCA3LjMxMywwIDcuMzEzLC0xLjI5NyA3LjMxMywtMi43MzQgMCwtMSAtMS4xNDEsLTUuMTcyIC0xLjcxOSwtNy43NSBsIC0zLjQ1MywtMTMuNzk3IGMgLTEuNDIyLC01Ljc1MDEgLTkuNjI1LC0zOC4zNTk1IC0xMC4xODcsLTQwLjkzNzYgLTAuNzE5LC0zLjU5MzggLTAuNzE5LC02LjAzMTMgLTAuNzE5LC03LjkwNjMgMCwtMTQuNjU2MiA4LjE4NywtMjIuMjY1NiAxNy41MTUsLTIyLjI2NTYgMTYuNjcyLDAgMzMuOTA3LDIxLjQwNjMgMzMuOTA3LDQyLjIzNDQgMCwxMy4yMTg3IC03LjQ2OSwyMi41NjI1IC0xOC4yMzUsMjIuNTYyNSAtNy40ODQsMCAtMTQuMjM0LC02LjE4NzUgLTE2Ljk1MywtOS4wNjI1IGwgMTAuNDg1LDQxLjgxMjEgeiBtIC05LjA0NywtOTQuNjcxNSBjIC00LjYxLDAgLTkuNjI1LDMuNDUzMSAtOS42MjUsMTQuNjU2MyAwLDQuNzM0MyAwLjQyMiw3LjQ2ODcgMy4wMTUsMTcuNTE1NiAwLjQyMiwxLjg3NSAyLjcxOSwxMS4wNjI1IDMuMjk3LDEyLjkzNzUgMC4yOTcsMS4xNDA2IDguNzY2LDEzLjkzNzUgMTguNTMxLDEzLjkzNzUgNi4zMjksMCA5LjIwNCwtNi4zMjgxIDkuMjA0LC0xMy43OTY5IDAsLTYuODkwNiAtNC4wMzIsLTIzLjEyNSAtNy42MjUsLTMwLjU5MzcgLTMuNTk0LC03Ljc2NTcgLTEwLjE4OCwtMTQuNjU2MyAtMTYuNzk3LC0xNC42NTYzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoOTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzM3LjIwMyw3OC41NzgxIGMgMCwyLjM3NSAwLDIuNTc4MiAtMi4yODEsMi41NzgyIC02LjE1NiwtNi4zNTk0IC0xNC45MDYsLTYuMzU5NCAtMTguMDc4LC02LjM1OTQgbCAwLC0zLjA3ODEgYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4MSBsIDAsLTUxLjQ1MzEgYyAwLC0zLjU3ODIgLTAuMjk2LC00Ljc2NTcgLTkuMjUsLTQuNzY1NyBsIC0zLjE3MSwwIDAsLTMuMDc4MSBjIDMuNDY4LDAuMjk2OSAxMi4xMjUsMC4yOTY5IDE2LjA5MywwLjI5NjkgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTY5IGwgMCwzLjA3ODEgLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTM4IC05LjIzNSw0Ljc2NTcgbCAwLDU1LjczNDMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg5OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0MzIuODU5LDEyMC43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0MjcuNjU2LDg4LjczNDQgYyAwLDkuMDQ2OSAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MzEgLTYuNjA5LC02LjMyODEgMCwtMS43MTg4IDEsLTIuNzM0NCAxLjU3OCwtMy4yOTY5IDEuNDM4LC0xLjI5NjkgNS4xNzIsLTUuMTcxOSA1LjE3MiwtMTIuNjU2MyAwLC02LjAzMTIgLTguNjI1LC0zOS42NDA2IC0yNS44NTksLTM5LjY0MDYgLTguNzY2LDAgLTEwLjQ4NSw3LjMyODEgLTEwLjQ4NSwxMi42NDA2IDAsNy4xODc1IDMuMjk3LDE3LjIzNDQgNy4xODgsMjcuNTc4MiAyLjI5Nyw1Ljg5MDYgMi44NzUsNy4zMjgxIDIuODc1LDEwLjIwMzEgMCw2LjAzMTIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MzggLTE4LjUzMSwtMjEuOTg0NCAwLC0wLjU3ODEgMC41NzgsLTEuMjk2OSAxLjU3OCwtMS4yOTY5IDEuMjk3LDAgMS40MzgsMC41NzgyIDIuMDE2LDIuNTkzOCAzLjQ1MywxMi4zNDM3IDkuMDQ3LDE3LjgxMjUgMTQuNTE1LDE3LjgxMjUgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0NCAtMS41NzgsLTcuODkwNiAtMy43MzUsLTEzLjM1OTQgLTYuOTA2LC0xOC4zOTA2IC02LjkwNiwtMjIuODQzNyAtNi45MDYsLTI2LjI4MTIgMCwtMy4xNzE5IDAuNDM4LC05LjA0NjkgNC44OTEsLTEzLjA3ODIgNS4xNzIsLTQuNDUzMSAxMi4zNTksLTQuNDUzMSAxMy42NCwtNC40NTMxIDIzLjg2LDAgMzIuMDQ3LDQ2Ljk4NDQgMzIuMDQ3LDU1LjE3MTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDYwLjIwMyw3OC41NzgxIGMgMCwyLjM3NSAwLDIuNTc4MiAtMi4yODEsMi41NzgyIC02LjE1NiwtNi4zNTk0IC0xNC45MDYsLTYuMzU5NCAtMTguMDc4LC02LjM1OTQgbCAwLC0zLjA3ODEgYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4MSBsIDAsLTUxLjQ1MzEgYyAwLC0zLjU3ODIgLTAuMjk2LC00Ljc2NTcgLTkuMjUsLTQuNzY1NyBsIC0zLjE3MSwwIDAsLTMuMDc4MSBjIDMuNDY4LDAuMjk2OSAxMi4xMjUsMC4yOTY5IDE2LjA5MywwLjI5NjkgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTY5IGwgMCwzLjA3ODEgLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTM4IC05LjIzNSw0Ljc2NTcgbCAwLDU1LjczNDMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTc0LjMxMyw2OC4xODc1IDM5LjY1NiwwIGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4MSAwLDIuNzM0NCAtMi40MzgsMi43MzQ0IC00LjU5NCwyLjczNDQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzgxIDAsLTIuNzM0NCAyLjQ1MywtMi43MzQ0IDQuNjA5LC0yLjczNDQgbCAzOS42NDEsMCAwLC0zOS42NTYyIGMgMCwtMiAwLC00LjU5MzggMi41OTQsLTQuNTkzOCAyLjcxOSwwIDIuNzE5LDIuNDM3NSAyLjcxOSw0LjU5MzggbCAwLDM5LjY1NjIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjkxLjE4OCwxMzEuMTA5IGMgMC4xNCwwLjU3OSAwLjQyMSwxLjQzOCAwLjQyMSwyLjE1NyAwLDEuNDM3IC0xLjQzNywxLjQzNyAtMS43MTgsMS40MzcgLTAuMTQxLDAgLTUuMzEzLC0wLjQzNyAtNy45MDcsLTAuNzE5IC0yLjQzNywtMC4xNTYgLTQuNTkzLC0wLjQzNyAtNy4xNzEsLTAuNTc4IC0zLjQ1NCwtMC4yODEgLTQuNDU0LC0wLjQzNyAtNC40NTQsLTMuMDE1IDAsLTEuNDM4IDEuNDM4LC0xLjQzOCAyLjg3NSwtMS40MzggNy4zMTMsMCA3LjMxMywtMS4yOTcgNy4zMTMsLTIuNzM0IDAsLTEgLTEuMTQxLC01LjE3MiAtMS43MTksLTcuNzUgbCAtMy40NTMsLTEzLjc5NyBjIC0xLjQyMiwtNS43NTAxIC05LjYyNSwtMzguMzU5NSAtMTAuMTg3LC00MC45Mzc2IC0wLjcxOSwtMy41OTM4IC0wLjcxOSwtNi4wMzEzIC0wLjcxOSwtNy45MDYzIDAsLTE0LjY1NjIgOC4xODcsLTIyLjI2NTYgMTcuNTE1LC0yMi4yNjU2IDE2LjY3MiwwIDMzLjkwNywyMS40MDYzIDMzLjkwNyw0Mi4yMzQ0IDAsMTMuMjE4NyAtNy40NjksMjIuNTYyNSAtMTguMjM1LDIyLjU2MjUgLTcuNDg0LDAgLTE0LjIzNCwtNi4xODc1IC0xNi45NTMsLTkuMDYyNSBsIDEwLjQ4NSw0MS44MTIxIHogbSAtOS4wNDcsLTk0LjY3MTUgYyAtNC42MSwwIC05LjYyNSwzLjQ1MzEgLTkuNjI1LDE0LjY1NjMgMCw0LjczNDMgMC40MjIsNy40Njg3IDMuMDE1LDE3LjUxNTYgMC40MjIsMS44NzUgMi43MTksMTEuMDYyNSAzLjI5NywxMi45Mzc1IDAuMjk3LDEuMTQwNiA4Ljc2NiwxMy45Mzc1IDE4LjUzMSwxMy45Mzc1IDYuMzI5LDAgOS4yMDQsLTYuMzI4MSA5LjIwNCwtMTMuNzk2OSAwLC02Ljg5MDYgLTQuMDMyLC0yMy4xMjUgLTcuNjI1LC0zMC41OTM3IC0zLjU5NCwtNy43NjU3IC0xMC4xODgsLTE0LjY1NjMgLTE2Ljc5NywtMTQuNjU2MyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEwOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA3MzAuNjA5LDIyLjY1NjMgMTAuNTMyLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDY4LDE5LjA3ODEgMjEuNDY4LDI5LjAxNTYgMCwxMS4zMjgyIC04Ljk1MywxOS4yNjU3IC0yMS4wNjIsMTkuMjY1NyAtMTEuMjM0LDAgLTE4LjU3OCwtOS4xNDA3IC0xOC41NzgsLTE3Ljk4NDQgMCwtNS41NjI1IDQuOTY5LC01LjU2MjUgNS4yNjUsLTUuNTYyNSAxLjY4OCwwIDUuMTU3LDEuMjAzMSA1LjE1Nyw1LjI2NTYgMCwyLjU5MzggLTEuNzgyLDUuMTcxOSAtNS4yNjYsNS4xNzE5IC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTM4IDIuMjgxLDYuNDUzMiA3LjY0LDEwLjEyNSAxMy40MDYsMTAuMTI1IDkuMDQ3LDAgMTMuMzEzLC04LjA0NjggMTMuMzEzLC0xNi4xODc1IDAsLTcuOTUzMSAtNC45NjksLTE1Ljc5NjggLTEwLjQzOCwtMjEuOTUzMSBMIDcyNC4wNjMsMTguNjcxOSBDIDcyMi45NjksMTcuNTc4MSA3MjIuOTY5LDE3LjM5MDYgNzIyLjk2OSwxNSBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MTMgLTIuNDg0LDAgYyAtMC41LC0yLjk4NDQgLTEuMjAzLC03LjM0MzggLTIuMTg3LC04Ljg0MzggLTAuNzA0LC0wLjc4MTIgLTcuMjUsLTAuNzgxMiAtOS40MzgsLTAuNzgxMiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDExMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4NDMuODU5LDEyMC43NjYgYyAtMS43MzQsLTEuNTc4IC03LjA0NiwtNi42MSAtNy4wNDYsLTguNjI1IDAsLTEuNDM4IDEuMjk2LC0yLjcxOSAyLjczNCwtMi43MTkgMS4yOTcsMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1Myw0LjI5NyA3LjMyOCw3LjAzMSAxMC42MjUsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMSw2LjYwOSAtNS40NjgsOC4zMjggLTAuNDIyLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg3NSwwIC0yLjU5MywtMC41NjMgLTIuNTkzLC0yLjcxOSAwLC0xLjI5NyAwLjg1OSwtNC43NSAzLjU5MywtOC42MjUgbCAtNDguMjY1LDAgYyAtMi40NTMsMCAtNC44OTEsMCAtNC44OTEsLTIuNzM0IDAsLTIuNTc4IDIuNTk0LC0yLjU3OCA0Ljg5MSwtMi41NzggbCA0NS45NjgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDExMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4MzguNjU2LDg4LjczNDQgYyAwLDkuMDQ2OSAtNC42MDksOS42MjUgLTUuNzUsOS42MjUgLTMuNDUzLDAgLTYuNjA5LC0zLjQ1MzEgLTYuNjA5LC02LjMyODEgMCwtMS43MTg4IDEsLTIuNzM0NCAxLjU3OCwtMy4yOTY5IDEuNDM4LC0xLjI5NjkgNS4xNzIsLTUuMTcxOSA1LjE3MiwtMTIuNjU2MyAwLC02LjAzMTIgLTguNjI1LC0zOS42NDA2IC0yNS44NTksLTM5LjY0MDYgLTguNzY2LDAgLTEwLjQ4NSw3LjMyODEgLTEwLjQ4NSwxMi42NDA2IDAsNy4xODc1IDMuMjk3LDE3LjIzNDQgNy4xODgsMjcuNTc4MiAyLjI5Nyw1Ljg5MDYgMi44NzUsNy4zMjgxIDIuODc1LDEwLjIwMzEgMCw2LjAzMTIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MzggLTE4LjUzMSwtMjEuOTg0NCAwLC0wLjU3ODEgMC41NzgsLTEuMjk2OSAxLjU3OCwtMS4yOTY5IDEuMjk3LDAgMS40MzgsMC41NzgyIDIuMDE2LDIuNTkzOCAzLjQ1MywxMi4zNDM3IDkuMDQ3LDE3LjgxMjUgMTQuNTE1LDE3LjgxMjUgMS4yODIsMCAzLjczNSwwIDMuNzM1LC00Ljc1IDAsLTMuNzM0NCAtMS41NzgsLTcuODkwNiAtMy43MzUsLTEzLjM1OTQgLTYuOTA2LC0xOC4zOTA2IC02LjkwNiwtMjIuODQzNyAtNi45MDYsLTI2LjI4MTIgMCwtMy4xNzE5IDAuNDM4LC05LjA0NjkgNC44OTEsLTEzLjA3ODIgNS4xNzIsLTQuNDUzMSAxMi4zNTksLTQuNDUzMSAxMy42NCwtNC40NTMxIDIzLjg2LDAgMzIuMDQ3LDQ2Ljk4NDQgMzIuMDQ3LDU1LjE3MTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gODUzLjYwOSwyMi42NTYzIDEwLjUzMiwxMC4yMTg3IGMgMTUuNSwxMy43MTg4IDIxLjQ2OCwxOS4wNzgxIDIxLjQ2OCwyOS4wMTU2IDAsMTEuMzI4MiAtOC45NTMsMTkuMjY1NyAtMjEuMDYyLDE5LjI2NTcgLTExLjIzNCwwIC0xOC41NzgsLTkuMTQwNyAtMTguNTc4LC0xNy45ODQ0IDAsLTUuNTYyNSA0Ljk2OSwtNS41NjI1IDUuMjY1LC01LjU2MjUgMS42ODgsMCA1LjE1NywxLjIwMzEgNS4xNTcsNS4yNjU2IDAsMi41OTM4IC0xLjc4Miw1LjE3MTkgLTUuMjY2LDUuMTcxOSAtMC43ODEsMCAtMC45ODQsMCAtMS4yODEsLTAuMDkzOCAyLjI4MSw2LjQ1MzIgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA0NywwIDEzLjMxMywtOC4wNDY4IDEzLjMxMywtMTYuMTg3NSAwLC03Ljk1MzEgLTQuOTY5LC0xNS43OTY4IC0xMC40MzgsLTIxLjk1MzEgTCA4NDcuMDYzLDE4LjY3MTkgQyA4NDUuOTY5LDE3LjU3ODEgODQ1Ljk2OSwxNy4zOTA2IDg0NS45NjksMTUgbCAzNi44NTksMCAyLjc4MSwxNy4yODEzIC0yLjQ4NCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIwMywtNy4zNDM4IC0yLjE4NywtOC44NDM4IC0wLjcwNCwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDM4LC0wLjc4MTIgbCAtMTcuODkxLDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTg1LjMxMyw2OC4xODc1IDM5LjY1NywwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4MSAwLDIuNzM0NCAtMi40MywyLjczNDQgLTQuNTksMi43MzQ0IGwgLTM5LjY1NywwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTc5LDQuNTk0IC0yLjczNCwwIC0yLjczNCwtMi40NTMgLTIuNzM0LC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4MSAwLC0yLjczNDQgMi40NTMsLTIuNzM0NCA0LjYwOSwtMi43MzQ0IGwgMzkuNjQxLDAgMCwtMzkuNjU2MiBjIDAsLTIgMCwtNC41OTM4IDIuNTk0LC00LjU5MzggMi43MTksMCAyLjcxOSwyLjQzNzUgMi43MTksNC41OTM4IGwgMCwzOS42NTYyIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTE4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwOTQuNDQsNDEuODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTIwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExNTguNDQsNDEuODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTIyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMjEuNDQsNDEuODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTI0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEzMjIuMzEsNjguMTg3NSAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4MSAwLDIuNzM0NCAtMi40MywyLjczNDQgLTQuNTksMi43MzQ0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4MSAwLC0yLjczNDQgMi40NSwtMi43MzQ0IDQuNjEsLTIuNzM0NCBsIDM5LjY0LDAgMCwtMzkuNjU2MiBjIDAsLTIgMCwtNC41OTM4IDIuNTksLTQuNTkzOCAyLjcyLDAgMi43MiwyLjQzNzUgMi43Miw0LjU5MzggbCAwLDM5LjY1NjIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTQzOS4xOSwxMzEuMTA5IGMgMC4xNCwwLjU3OSAwLjQyLDEuNDM4IDAuNDIsMi4xNTcgMCwxLjQzNyAtMS40NCwxLjQzNyAtMS43MiwxLjQzNyAtMC4xNCwwIC01LjMxLC0wLjQzNyAtNy45MSwtMC43MTkgLTIuNDMsLTAuMTU2IC00LjU5LC0wLjQzNyAtNy4xNywtMC41NzggLTMuNDUsLTAuMjgxIC00LjQ1LC0wLjQzNyAtNC40NSwtMy4wMTUgMCwtMS40MzggMS40NCwtMS40MzggMi44NywtMS40MzggNy4zMiwwIDcuMzIsLTEuMjk3IDcuMzIsLTIuNzM0IDAsLTEgLTEuMTQsLTUuMTcyIC0xLjcyLC03Ljc1IGwgLTMuNDUsLTEzLjc5NyBjIC0xLjQzLC01Ljc1MDEgLTkuNjMsLTM4LjM1OTUgLTEwLjE5LC00MC45Mzc2IC0wLjcyLC0zLjU5MzggLTAuNzIsLTYuMDMxMyAtMC43MiwtNy45MDYzIDAsLTE0LjY1NjIgOC4xOSwtMjIuMjY1NiAxNy41MSwtMjIuMjY1NiAxNi42OCwwIDMzLjkxLDIxLjQwNjMgMzMuOTEsNDIuMjM0NCAwLDEzLjIxODcgLTcuNDcsMjIuNTYyNSAtMTguMjMsMjIuNTYyNSAtNy40OSwwIC0xNC4yNCwtNi4xODc1IC0xNi45NiwtOS4wNjI1IGwgMTAuNDksNDEuODEyMSB6IG0gLTkuMDUsLTk0LjY3MTUgYyAtNC42MSwwIC05LjYyLDMuNDUzMSAtOS42MiwxNC42NTYzIDAsNC43MzQzIDAuNDIsNy40Njg3IDMuMDEsMTcuNTE1NiAwLjQyLDEuODc1IDIuNzIsMTEuMDYyNSAzLjMsMTIuOTM3NSAwLjMsMS4xNDA2IDguNzYsMTMuOTM3NSAxOC41MywxMy45Mzc1IDYuMzMsMCA5LjIsLTYuMzI4MSA5LjIsLTEzLjc5NjkgMCwtNi44OTA2IC00LjAzLC0yMy4xMjUgLTcuNjIsLTMwLjU5MzcgLTMuNiwtNy43NjU3IC0xMC4xOSwtMTQuNjU2MyAtMTYuOCwtMTQuNjU2MyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNDk0LjUyLDgyLjg0MzggYyAwLDAuMTA5MyAwLDEuMDkzNyAtMS4zLDEuMDkzNyAtMi4yOCwwIC05LjUzLC0wLjc5NjkgLTEyLjEzLC0wLjk4NDQgLTAuNzksLTAuMTA5MyAtMS44NywtMC4yMDMxIC0xLjg3LC0yIDAsLTEuMTg3NSAwLjg5LC0xLjE4NzUgMi4zNywtMS4xODc1IDQuNzcsMCA0Ljk3LC0wLjY4NzUgNC45NywtMS42ODc1IGwgLTAuMjksLTEuOTg0MyAtMTQuNDEsLTU3LjIxODggYyAtMC4zOSwtMS4zOTA2IC0wLjM5LC0xLjU5MzcgLTAuMzksLTIuMTg3NSAwLC0yLjI4MTIgMS45OCwtMi43ODEyIDIuODcsLTIuNzgxMiAxLjMsMCAyLjc5LDAuODkwNiAzLjM4LDIuMDkzNyAwLjUsMC44OTA2IDQuOTcsMTkuMjY1NiA1LjU2LDIxLjc1IDMuMzgsLTAuMjk2OSAxMS41MywtMS44OTA2IDExLjUzLC04LjQ1MzEgMCwtMC42ODc1IDAsLTEuMDc4MSAtMC4yOSwtMi4wNzgxIC0wLjIxLC0xLjE4NzUgLTAuNDEsLTIuMzkwNyAtMC40MSwtMy40ODQ0IDAsLTUuODU5NCAzLjk3LC05LjgyODEgOS4xNCwtOS44MjgxIDIuOTgsMCA1LjY2LDEuNTkzNyA3Ljg0LDUuMjY1NiAyLjQ5LDQuMzc1IDMuNTgsOS44MjgxIDMuNTgsMTAuMDMxMiAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEuMDksLTAuNDA2MiAtMS4zOSwtMS43OTY4IC0xLjk4LC03LjI1IC00LjI2LC0xMi4zMTI1IC04LjY0LC0xMi4zMTI1IC0xLjg5LDAgLTMuMTgsMS4wOTM3IC0zLjE4LDQuNjcxOCAwLDEuNjg3NSAwLjQsMy45Njg4IDAuNzksNS41NjI1IDAuNDEsMS42ODc1IDAuNDEsMi4wNzgyIDAuNDEsMy4wNzgyIDAsNi40NTMxIC02LjI3LDkuMzI4MSAtMTQuNywxMC40MjE4IDMuMDcsMS43OTY5IDYuMjUsNC45Njg4IDguNTMsNy4zNTk0IDQuNzgsNS4yNjU2IDkuMzQsOS41MzEzIDE0LjIyLDkuNTMxMyAwLjU5LDAgMC42OCwwIDAuODksLTAuMDkzOCAxLjE4LC0wLjIwMzEgMS4yOCwtMC4yMDMxIDIuMDcsLTAuNzk2OSAwLjIxLC0wLjA5MzcgMC4yMSwtMC4yMDMxIDAuNDEsLTAuMzkwNiAtNC43NiwtMC4zMTI1IC01LjY3LC00LjE3MTkgLTUuNjcsLTUuMzc1IDAsLTEuNTc4MSAxLjA5LC0zLjQ2ODcgMy43OCwtMy40Njg3IDIuNTgsMCA1LjQ3LDIuMTg3NSA1LjQ3LDYuMDYyNSAwLDIuOTY4NyAtMi4zLDYuMjUgLTYuNzcsNi4yNSAtMi43OCwwIC03LjM0LC0wLjc5NjkgLTE0LjUsLTguNzM0NCAtMy4zNywtMy43ODEzIC03LjI1LC03Ljc1IC0xMS4wMywtOS4yNSBsIDEwLjM1LDQxLjkyMTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTU5Ni44NiwxMjAuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTU5MS42Niw4OC43MzQ0IGMgMCw5LjA0NjkgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMxIC02LjYxLC02LjMyODEgMCwtMS43MTg4IDEsLTIuNzM0NCAxLjU4LC0zLjI5NjkgMS40MywtMS4yOTY5IDUuMTcsLTUuMTcxOSA1LjE3LC0xMi42NTYzIDAsLTYuMDMxMiAtOC42MywtMzkuNjQwNiAtMjUuODYsLTM5LjY0MDYgLTguNzcsMCAtMTAuNDksNy4zMjgxIC0xMC40OSwxMi42NDA2IDAsNy4xODc1IDMuMywxNy4yMzQ0IDcuMTksMjcuNTc4MiAyLjMsNS44OTA2IDIuODgsNy4zMjgxIDIuODgsMTAuMjAzMSAwLDYuMDMxMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzOCAtMTguNTMsLTIxLjk4NDQgMCwtMC41NzgxIDAuNTcsLTEuMjk2OSAxLjU3LC0xLjI5NjkgMS4zLDAgMS40NCwwLjU3ODIgMi4wMiwyLjU5MzggMy40NSwxMi4zNDM3IDkuMDUsMTcuODEyNSAxNC41MSwxNy44MTI1IDEuMjksMCAzLjc0LDAgMy43NCwtNC43NSAwLC0zLjczNDQgLTEuNTgsLTcuODkwNiAtMy43NCwtMTMuMzU5NCAtNi45LC0xOC4zOTA2IC02LjksLTIyLjg0MzcgLTYuOSwtMjYuMjgxMiAwLC0zLjE3MTkgMC40NCwtOS4wNDY5IDQuODksLTEzLjA3ODIgNS4xNywtNC40NTMxIDEyLjM2LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA1LDQ2Ljk4NDQgMzIuMDUsNTUuMTcxOSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNjIzLjUyLDgyLjg0MzggYyAwLDAuMTA5MyAwLDEuMDkzNyAtMS4zLDEuMDkzNyAtMi4yOCwwIC05LjUzLC0wLjc5NjkgLTEyLjEzLC0wLjk4NDQgLTAuNzksLTAuMTA5MyAtMS44NywtMC4yMDMxIC0xLjg3LC0yIDAsLTEuMTg3NSAwLjg5LC0xLjE4NzUgMi4zNywtMS4xODc1IDQuNzcsMCA0Ljk3LC0wLjY4NzUgNC45NywtMS42ODc1IGwgLTAuMjksLTEuOTg0MyAtMTQuNDEsLTU3LjIxODggYyAtMC4zOSwtMS4zOTA2IC0wLjM5LC0xLjU5MzcgLTAuMzksLTIuMTg3NSAwLC0yLjI4MTIgMS45OCwtMi43ODEyIDIuODcsLTIuNzgxMiAxLjMsMCAyLjc5LDAuODkwNiAzLjM4LDIuMDkzNyAwLjUsMC44OTA2IDQuOTcsMTkuMjY1NiA1LjU2LDIxLjc1IDMuMzgsLTAuMjk2OSAxMS41MywtMS44OTA2IDExLjUzLC04LjQ1MzEgMCwtMC42ODc1IDAsLTEuMDc4MSAtMC4yOSwtMi4wNzgxIC0wLjIxLC0xLjE4NzUgLTAuNDEsLTIuMzkwNyAtMC40MSwtMy40ODQ0IDAsLTUuODU5NCAzLjk3LC05LjgyODEgOS4xNCwtOS44MjgxIDIuOTgsMCA1LjY2LDEuNTkzNyA3Ljg0LDUuMjY1NiAyLjQ5LDQuMzc1IDMuNTgsOS44MjgxIDMuNTgsMTAuMDMxMiAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEuMDksLTAuNDA2MiAtMS4zOSwtMS43OTY4IC0xLjk4LC03LjI1IC00LjI2LC0xMi4zMTI1IC04LjY0LC0xMi4zMTI1IC0xLjg5LDAgLTMuMTgsMS4wOTM3IC0zLjE4LDQuNjcxOCAwLDEuNjg3NSAwLjQsMy45Njg4IDAuNzksNS41NjI1IDAuNDEsMS42ODc1IDAuNDEsMi4wNzgyIDAuNDEsMy4wNzgyIDAsNi40NTMxIC02LjI3LDkuMzI4MSAtMTQuNywxMC40MjE4IDMuMDcsMS43OTY5IDYuMjUsNC45Njg4IDguNTMsNy4zNTk0IDQuNzgsNS4yNjU2IDkuMzQsOS41MzEzIDE0LjIyLDkuNTMxMyAwLjU5LDAgMC42OCwwIDAuODksLTAuMDkzOCAxLjE4LC0wLjIwMzEgMS4yOCwtMC4yMDMxIDIuMDcsLTAuNzk2OSAwLjIxLC0wLjA5MzcgMC4yMSwtMC4yMDMxIDAuNDEsLTAuMzkwNiAtNC43NiwtMC4zMTI1IC01LjY3LC00LjE3MTkgLTUuNjcsLTUuMzc1IDAsLTEuNTc4MSAxLjA5LC0zLjQ2ODcgMy43OCwtMy40Njg3IDIuNTgsMCA1LjQ3LDIuMTg3NSA1LjQ3LDYuMDYyNSAwLDIuOTY4NyAtMi4zLDYuMjUgLTYuNzcsNi4yNSAtMi43OCwwIC03LjM0LC0wLjc5NjkgLTE0LjUsLTguNzM0NCAtMy4zNywtMy43ODEzIC03LjI1LC03Ljc1IC0xMS4wMywtOS4yNSBsIDEwLjM1LDQxLjkyMTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTY4Mi4wMiwzNC40MjE5IGMgMCw4LjMyODEgLTIuNzQsMTQuNTE1NiAtOC42MywxNC41MTU2IC00LjU5LDAgLTYuODksLTMuNzM0NCAtNi44OSwtNi44OTA2IDAsLTMuMTcxOSAyLjE2LC03LjA0NjkgNy4wMywtNy4wNDY5IDEuODgsMCAzLjQ1LDAuNTc4MSA0Ljc1LDEuODc1IDAuMjgsMC4yODEzIDAuNDIsMC4yODEzIDAuNTgsMC4yODEzIDAuMjgsMCAwLjI4LC0yLjAxNTcgMC4yOCwtMi43MzQ0IDAsLTQuNzM0NCAtMC44NiwtMTQuMDc4MSAtOS4xOSwtMjMuNDA2MyAtMS41OSwtMS43MzQzNSAtMS41OSwtMi4wMTU2IC0xLjU5LC0yLjMxMjQ3IDAsLTAuNzAzMTMgMC43MiwtMS40MjE4OCAxLjQ0LC0xLjQyMTg4IDEuMTUsMCAxMi4yMiwxMC42MjUwNSAxMi4yMiwyNy4xNDA2NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxODgxLjE5LDEzMS4xMDkgYyAwLjE0LDAuNTc5IDAuNDIsMS40MzggMC40MiwyLjE1NyAwLDEuNDM3IC0xLjQ0LDEuNDM3IC0xLjcyLDEuNDM3IC0wLjE0LDAgLTUuMzEsLTAuNDM3IC03LjkxLC0wLjcxOSAtMi40MywtMC4xNTYgLTQuNTksLTAuNDM3IC03LjE3LC0wLjU3OCAtMy40NSwtMC4yODEgLTQuNDUsLTAuNDM3IC00LjQ1LC0zLjAxNSAwLC0xLjQzOCAxLjQ0LC0xLjQzOCAyLjg3LC0xLjQzOCA3LjMyLDAgNy4zMiwtMS4yOTcgNy4zMiwtMi43MzQgMCwtMSAtMS4xNCwtNS4xNzIgLTEuNzIsLTcuNzUgbCAtMy40NSwtMTMuNzk3IGMgLTEuNDMsLTUuNzUwMSAtOS42MywtMzguMzU5NSAtMTAuMTksLTQwLjkzNzYgLTAuNzIsLTMuNTkzOCAtMC43MiwtNi4wMzEzIC0wLjcyLC03LjkwNjMgMCwtMTQuNjU2MiA4LjE5LC0yMi4yNjU2IDE3LjUxLC0yMi4yNjU2IDE2LjY4LDAgMzMuOTEsMjEuNDA2MyAzMy45MSw0Mi4yMzQ0IDAsMTMuMjE4NyAtNy40NywyMi41NjI1IC0xOC4yMywyMi41NjI1IC03LjQ5LDAgLTE0LjI0LC02LjE4NzUgLTE2Ljk2LC05LjA2MjUgbCAxMC40OSw0MS44MTIxIHogbSAtOS4wNSwtOTQuNjcxNSBjIC00LjYxLDAgLTkuNjIsMy40NTMxIC05LjYyLDE0LjY1NjMgMCw0LjczNDMgMC40Miw3LjQ2ODcgMy4wMSwxNy41MTU2IDAuNDIsMS44NzUgMi43MiwxMS4wNjI1IDMuMywxMi45Mzc1IDAuMywxLjE0MDYgOC43NiwxMy45Mzc1IDE4LjUzLDEzLjkzNzUgNi4zMywwIDkuMiwtNi4zMjgxIDkuMiwtMTMuNzk2OSAwLC02Ljg5MDYgLTQuMDMsLTIzLjEyNSAtNy42MiwtMzAuNTkzNyAtMy42LC03Ljc2NTcgLTEwLjE5LC0xNC42NTYzIC0xNi44LC0xNC42NTYzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5MzcuMiw3OC41NzgxIGMgMCwyLjM3NSAwLDIuNTc4MiAtMi4yOCwyLjU3ODIgLTYuMTUsLTYuMzU5NCAtMTQuOSwtNi4zNTk0IC0xOC4wOCwtNi4zNTk0IGwgMCwtMy4wNzgxIGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3ODEgbCAwLC01MS40NTMxIGMgMCwtMy41NzgyIC0wLjMsLTQuNzY1NyAtOS4yNSwtNC43NjU3IGwgLTMuMTcsMCAwLC0zLjA3ODEgYyAzLjQ3LDAuMjk2OSAxMi4xMiwwLjI5NjkgMTYuMDksMC4yOTY5IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk2OSBsIDAsMy4wNzgxIC0zLjE5LDAgYyAtOC45NCwwIC05LjI0LDEuMDkzOCAtOS4yNCw0Ljc2NTcgbCAwLDU1LjczNDMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTk5MS4wMiwzNC40MjE5IGMgMCw4LjMyODEgLTIuNzQsMTQuNTE1NiAtOC42MywxNC41MTU2IC00LjU5LDAgLTYuODksLTMuNzM0NCAtNi44OSwtNi44OTA2IDAsLTMuMTcxOSAyLjE2LC03LjA0NjkgNy4wMywtNy4wNDY5IDEuODgsMCAzLjQ1LDAuNTc4MSA0Ljc1LDEuODc1IDAuMjgsMC4yODEzIDAuNDIsMC4yODEzIDAuNTgsMC4yODEzIDAuMjgsMCAwLjI4LC0yLjAxNTcgMC4yOCwtMi43MzQ0IDAsLTQuNzM0NCAtMC44NiwtMTQuMDc4MSAtOS4xOSwtMjMuNDA2MyAtMS41OSwtMS43MzQzNSAtMS41OSwtMi4wMTU2IC0xLjU5LC0yLjMxMjQ3IDAsLTAuNzAzMTMgMC43MiwtMS40MjE4OCAxLjQ0LC0xLjQyMTg4IDEuMTUsMCAxMi4yMiwxMC42MjUwNSAxMi4yMiwyNy4xNDA2NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMDUzLjQ0LDQxLjg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0NiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMTE2LjQ0LDQxLjg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMTgwLjQ0LDQxLjg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMjQzLjAyLDM0LjQyMTkgYyAwLDguMzI4MSAtMi43NCwxNC41MTU2IC04LjYzLDE0LjUxNTYgLTQuNTksMCAtNi44OSwtMy43MzQ0IC02Ljg5LC02Ljg5MDYgMCwtMy4xNzE5IDIuMTYsLTcuMDQ2OSA3LjAzLC03LjA0NjkgMS44OCwwIDMuNDUsMC41NzgxIDQuNzUsMS44NzUgMC4yOCwwLjI4MTMgMC40MiwwLjI4MTMgMC41OCwwLjI4MTMgMC4yOCwwIDAuMjgsLTIuMDE1NyAwLjI4LC0yLjczNDQgMCwtNC43MzQ0IC0wLjg2LC0xNC4wNzgxIC05LjE5LC0yMy40MDYzIC0xLjU5LC0xLjczNDM1IC0xLjU5LC0yLjAxNTYgLTEuNTksLTIuMzEyNDcgMCwtMC43MDMxMyAwLjcyLC0xLjQyMTg4IDEuNDQsLTEuNDIxODggMS4xNSwwIDEyLjIyLDEwLjYyNTA1IDEyLjIyLDI3LjE0MDY1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTUyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIzMTIuMTksMTMxLjEwOSBjIDAuMTQsMC41NzkgMC40MiwxLjQzOCAwLjQyLDIuMTU3IDAsMS40MzcgLTEuNDQsMS40MzcgLTEuNzIsMS40MzcgLTAuMTQsMCAtNS4zMSwtMC40MzcgLTcuOTEsLTAuNzE5IC0yLjQzLC0wLjE1NiAtNC41OSwtMC40MzcgLTcuMTcsLTAuNTc4IC0zLjQ1LC0wLjI4MSAtNC40NSwtMC40MzcgLTQuNDUsLTMuMDE1IDAsLTEuNDM4IDEuNDQsLTEuNDM4IDIuODcsLTEuNDM4IDcuMzIsMCA3LjMyLC0xLjI5NyA3LjMyLC0yLjczNCAwLC0xIC0xLjE0LC01LjE3MiAtMS43MiwtNy43NSBsIC0zLjQ1LC0xMy43OTcgYyAtMS40MywtNS43NTAxIC05LjYzLC0zOC4zNTk1IC0xMC4xOSwtNDAuOTM3NiAtMC43MiwtMy41OTM4IC0wLjcyLC02LjAzMTMgLTAuNzIsLTcuOTA2MyAwLC0xNC42NTYyIDguMTksLTIyLjI2NTYgMTcuNTEsLTIyLjI2NTYgMTYuNjgsMCAzMy45MSwyMS40MDYzIDMzLjkxLDQyLjIzNDQgMCwxMy4yMTg3IC03LjQ3LDIyLjU2MjUgLTE4LjIzLDIyLjU2MjUgLTcuNDksMCAtMTQuMjQsLTYuMTg3NSAtMTYuOTYsLTkuMDYyNSBsIDEwLjQ5LDQxLjgxMjEgeiBtIC05LjA1LC05NC42NzE1IGMgLTQuNjEsMCAtOS42MiwzLjQ1MzEgLTkuNjIsMTQuNjU2MyAwLDQuNzM0MyAwLjQyLDcuNDY4NyAzLjAxLDE3LjUxNTYgMC40MiwxLjg3NSAyLjcyLDExLjA2MjUgMy4zLDEyLjkzNzUgMC4zLDEuMTQwNiA4Ljc2LDEzLjkzNzUgMTguNTMsMTMuOTM3NSA2LjMzLDAgOS4yLC02LjMyODEgOS4yLC0xMy43OTY5IDAsLTYuODkwNiAtNC4wMywtMjMuMTI1IC03LjYyLC0zMC41OTM3IC0zLjYsLTcuNzY1NyAtMTAuMTksLTE0LjY1NjMgLTE2LjgsLTE0LjY1NjMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjM2Ny41Miw4Mi44NDM4IGMgMCwwLjEwOTMgMCwxLjA5MzcgLTEuMywxLjA5MzcgLTIuMjgsMCAtOS41MywtMC43OTY5IC0xMi4xMywtMC45ODQ0IC0wLjc5LC0wLjEwOTMgLTEuODcsLTAuMjAzMSAtMS44NywtMiAwLC0xLjE4NzUgMC44OSwtMS4xODc1IDIuMzcsLTEuMTg3NSA0Ljc3LDAgNC45NywtMC42ODc1IDQuOTcsLTEuNjg3NSBsIC0wLjI5LC0xLjk4NDMgLTE0LjQxLC01Ny4yMTg4IGMgLTAuMzksLTEuMzkwNiAtMC4zOSwtMS41OTM3IC0wLjM5LC0yLjE4NzUgMCwtMi4yODEyIDEuOTgsLTIuNzgxMiAyLjg3LC0yLjc4MTIgMS4zLDAgMi43OSwwLjg5MDYgMy4zOCwyLjA5MzcgMC41LDAuODkwNiA0Ljk3LDE5LjI2NTYgNS41NiwyMS43NSAzLjM4LC0wLjI5NjkgMTEuNTMsLTEuODkwNiAxMS41MywtOC40NTMxIDAsLTAuNjg3NSAwLC0xLjA3ODEgLTAuMjksLTIuMDc4MSAtMC4yMSwtMS4xODc1IC0wLjQxLC0yLjM5MDcgLTAuNDEsLTMuNDg0NCAwLC01Ljg1OTQgMy45NywtOS44MjgxIDkuMTQsLTkuODI4MSAyLjk4LDAgNS42NiwxLjU5MzcgNy44NCw1LjI2NTYgMi40OSw0LjM3NSAzLjU4LDkuODI4MSAzLjU4LDEwLjAzMTIgMCwxIC0wLjg5LDEgLTEuMTksMSAtMSwwIC0xLjA5LC0wLjQwNjIgLTEuMzksLTEuNzk2OCAtMS45OCwtNy4yNSAtNC4yNiwtMTIuMzEyNSAtOC42NCwtMTIuMzEyNSAtMS44OSwwIC0zLjE4LDEuMDkzNyAtMy4xOCw0LjY3MTggMCwxLjY4NzUgMC40LDMuOTY4OCAwLjc5LDUuNTYyNSAwLjQxLDEuNjg3NSAwLjQxLDIuMDc4MiAwLjQxLDMuMDc4MiAwLDYuNDUzMSAtNi4yNyw5LjMyODEgLTE0LjcsMTAuNDIxOCAzLjA3LDEuNzk2OSA2LjI1LDQuOTY4OCA4LjUzLDcuMzU5NCA0Ljc4LDUuMjY1NiA5LjM0LDkuNTMxMyAxNC4yMiw5LjUzMTMgMC41OSwwIDAuNjgsMCAwLjg5LC0wLjA5MzggMS4xOCwtMC4yMDMxIDEuMjgsLTAuMjAzMSAyLjA3LC0wLjc5NjkgMC4yMSwtMC4wOTM3IDAuMjEsLTAuMjAzMSAwLjQxLC0wLjM5MDYgLTQuNzYsLTAuMzEyNSAtNS42NywtNC4xNzE5IC01LjY3LC01LjM3NSAwLC0xLjU3ODEgMS4wOSwtMy40Njg3IDMuNzgsLTMuNDY4NyAyLjU4LDAgNS40NywyLjE4NzUgNS40Nyw2LjA2MjUgMCwyLjk2ODcgLTIuMyw2LjI1IC02Ljc3LDYuMjUgLTIuNzgsMCAtNy4zNCwtMC43OTY5IC0xNC41LC04LjczNDQgLTMuMzcsLTMuNzgxMyAtNy4yNSwtNy43NSAtMTEuMDMsLTkuMjUgbCAxMC4zNSw0MS45MjE5IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDI1MTUuNzIsNjguMDQ2OSBjIDIuNDUsMCA1LjAzLDAgNS4wMywyLjg3NSAwLDIuODU5NCAtMi41OCwyLjg1OTQgLTUuMDMsMi44NTk0IGwgLTYwLjkxLDAgYyAxLjcyLDE5LjI1IDE4LjI1LDMzLjA0NjcgMzguNSwzMy4wNDY3IGwgMjIuNDEsMCBjIDIuNDUsMCA1LjAzLDAgNS4wMywyLjg3NSAwLDIuODc1IC0yLjU4LDIuODc1IC01LjAzLDIuODc1IGwgLTIyLjY5LDAgYyAtMjQuNTgsMCAtNDQuMTEsLTE4LjY3MTcgLTQ0LjExLC00MS42NTYxIDAsLTIzIDE5LjUzLC00MS42NzE5IDQ0LjExLC00MS42NzE5IGwgMjIuNjksMCBjIDIuNDUsMCA1LjAzLDAgNS4wMywyLjg3NSAwLDIuODc1IC0yLjU4LDIuODc1IC01LjAzLDIuODc1IGwgLTIyLjQxLDAgYyAtMjAuMjUsMCAtMzYuNzgsMTMuNzk2OSAtMzguNSwzMy4wNDY5IGwgNjAuOTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE1OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNjExLjUsODAuMTA5NCA1LjE3LDAgMjEuNTUsLTMzLjMyODEgYyAxLjQ0LC0yLjI5NjkgNC44OSwtNy45MDYzIDYuNDcsLTEwLjA2MjUgQyAyNjQ1LjY5LDM1IDI2NDYuMTMsMzUgMjY0OS40MiwzNSBsIDE5LjgzLDAgYyAyLjU4LDAgNC43MywwIDQuNzMsMi41NzgxIDAsMS4xNTYzIC0wLjg1LDIuMTU2MyAtMi4xNSwyLjQ1MzIgLTUuMzEsMS4xNDA2IC0xMi4zNSwxMC42MjUgLTE1LjgsMTUuMjE4NyAtMSwxLjQzNzUgLTguMTksMTAuOTIxOSAtMTcuODEsMjYuNDM3NSAxMi43OCwyLjI5NjkgMjUuMTQsNy43NjU2IDI1LjE0LDI0Ljg1OTUgMCwxOS45NjkgLTIxLjExLDI2Ljg1OSAtMzguMDYsMjYuODU5IGwgLTQ1LjExLDAgYyAtMi42LDAgLTQuODksMCAtNC44OSwtMi41OTMgMCwtMi40MzggMi43MywtMi40MzggMy44NywtMi40MzggOC4xOSwwIDguOTEsLTEgOC45MSwtOC4xODcgbCAwLC03MS45NjkyIGMgMCwtNy4xODc1IC0wLjcyLC04LjE4NzUgLTguOTEsLTguMTg3NSAtMS4xNCwwIC0zLjg3LDAgLTMuODcsLTIuNDUzMiBDIDI1NzUuMywzNSAyNTc3LjU5LDM1IDI1ODAuMTksMzUgbCAzOS4zNiwwIGMgMi41OCwwIDQuNzMsMCA0LjczLDIuNTc4MSAwLDIuNDUzMiAtMi40NCwyLjQ1MzIgLTQuMDEsMi40NTMyIC04LjE5LDAgLTguNzcsMS4xNDA2IC04Ljc3LDguMTg3NSBsIDAsMzEuODkwNiB6IG0gMjcuNzIsNy4wMzEyIGMgNC4wMyw1LjMyODIgNC40NSwxMi45Mzc0IDQuNDUsMTkuMjUwNCAwLDYuOTA2IC0wLjg2LDE0LjUxNSAtNS40NSwyMC40MDYgNS44OSwtMS4yOTcgMjAuMTEsLTUuNzUgMjAuMTEsLTIwLjI1IDAsLTkuMzQzOSAtNC4zMSwtMTYuNjcyIC0xOS4xMSwtMTkuNDA2NCB6IG0gLTI3LjcyLDMzLjQ4NDQgYyAwLDMuMDE2IDAsNy43NSA4LjkxLDcuNzUgMTIuMjIsMCAxOC4yNSwtNS4wMzEgMTguMjUsLTIxLjk4NCAwLC0xOC41MzE2IC00LjQ2LC0yMS4yNTA0IC0yNy4xNiwtMjEuMjUwNCBsIDAsMzUuNDg0NCB6IG0gLTE5LjUzLC04MC41OTM3IGMgMS4xNCwyLjU3ODEgMS4xNCw2LjYwOTMgMS4xNCw3Ljg5MDYgbCAwLDcyLjU0NzEgYyAwLDEuNDM3IDAsNS4zMjggLTEuMTQsNy45MDYgbCAxNi4zNywwIGMgLTEuODcsLTIuMjk3IC0xLjg3LC01LjE3MiAtMS44NywtNy4zMjggbCAwLC03My4xMjUxIGMgMCwtMS40MjE5IDAsLTUuMzEyNSAxLjE2LC03Ljg5MDYgbCAtMTUuNjYsMCB6IG0gMzAuNTksNDAuMDc4MSBjIDEsMC4xNDA2IDEuNTgsMC4yODEyIDIuNzQsMC4yODEyIDIuMTUsMCA1LjMxLDAuMjk2OSA3LjQ3LDAuNTc4MiAyLjE1LC0zLjQ1MzIgMTcuNjcsLTI5LjAxNTcgMjkuNTksLTQwLjkzNzUgbCAtMTMuOTQsMCAtMjUuODYsNDAuMDc4MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyNzAyLjQ0LDQxLjg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48L2c+PC9nPjwvc3ZnPg==)

 . Если заметить, что
такой вектор всегда равен вектору
. Если заметить, что
такой вектор всегда равен вектору  , то видно, что он лежит в
, то видно, что он лежит в  . И вот теперь мы наконец-то можем уверенно пойти дальше в изучении свойств
линейных пространств.
. И вот теперь мы наконец-то можем уверенно пойти дальше в изучении свойств
линейных пространств.  и умножим на него какой-нибудь вектор
и умножим на него какой-нибудь вектор  . Полученная система
векторов
. Полученная система
векторов  будет базисом
наравне с прежней. Почему? Потому что любой вектор пространства по-прежнему
будет представим в виде линейной комбинации этих векторов, и по-прежнему
единственным образом. Действительно, пусть в старом базисе произвольный
вектор
будет базисом
наравне с прежней. Почему? Потому что любой вектор пространства по-прежнему
будет представим в виде линейной комбинации этих векторов, и по-прежнему
единственным образом. Действительно, пусть в старом базисе произвольный
вектор 

 . И представление это по-прежнему единственно, ведь будь
их два, представлений в исходном базисе тоже было бы два (достаточно было бы
умножить
. И представление это по-прежнему единственно, ведь будь
их два, представлений в исходном базисе тоже было бы два (достаточно было бы
умножить  -е коэффициенты этих двух представлений на
-е коэффициенты этих двух представлений на  , чтобы получить
коэффициенты двух представлений того же самого вектора в старом базисе).
, чтобы получить
коэффициенты двух представлений того же самого вектора в старом базисе).
 (теперь никто не запрещает ему быть нулём,
хотя случай с нулём тривиален и неинтересен) и вместо вектора
(теперь никто не запрещает ему быть нулём,
хотя случай с нулём тривиален и неинтересен) и вместо вектора  , остальные векторы оставив
без изменения. Новая система векторов
, остальные векторы оставив
без изменения. Новая система векторов
 тоже будет базисом.
Проверим это. Пусть какой-либо вектор
тоже будет базисом.
Проверим это. Пусть какой-либо вектор 
 сумму
сумму  ,
раскрыв пару скобок и сократив пару слагаемых. Совершенно аналогично можно
получить представление вектора в прежнем базисе, зная представление в
новом. Значит, представление в новом базисе всегда существует и всегда
единственно, как и представление в прежнем базисе.
,
раскрыв пару скобок и сократив пару слагаемых. Совершенно аналогично можно
получить представление вектора в прежнем базисе, зная представление в
новом. Значит, представление в новом базисе всегда существует и всегда
единственно, как и представление в прежнем базисе.
 , причём для определённости
, причём для определённости  .
Раз
.
Раз ![\begin{array}{cl}\vec{u}_1 &= a_{11}\vec{v}_1+a_{12}\vec{v}_2+…+a_{1n}\vec{v}_n;\\[2mm]
\vec{u}_2&=a_{21}\vec{v}_1+a_{22}\vec{v}_2+…+a_{2n}\vec{v}_n;\\[2mm]\vdots &\\[2mm]
\vec{u}_m&=a_{m1}\vec{v}_1+a_{m2}\vec{v}_2+…+a_{mn}\vec{v}_n.\end{array}](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9Im5vIj8+CjxzdmcKICAgeG1sbnM6ZGM9Imh0dHA6Ly9wdXJsLm9yZy9kYy9lbGVtZW50cy8xLjEvIgogICB4bWxuczpjYz0iaHR0cDovL2NyZWF0aXZlY29tbW9ucy5vcmcvbnMjIgogICB4bWxuczpyZGY9Imh0dHA6Ly93d3cudzMub3JnLzE5OTkvMDIvMjItcmRmLXN5bnRheC1ucyMiCiAgIHhtbG5zOnN2Zz0iaHR0cDovL3d3dy53My5vcmcvMjAwMC9zdmciCiAgIHhtbG5zPSJodHRwOi8vd3d3LnczLm9yZy8yMDAwL3N2ZyIKICAgdmlld0JveD0iMCAwIDIxNyA4NSIKICAgaGVpZ2h0PSI4NSIKICAgd2lkdGg9IjIxNyIKICAgeG1sOnNwYWNlPSJwcmVzZXJ2ZSIKICAgdmVyc2lvbj0iMS4xIgogICBpZD0ic3ZnMiI+PG1ldGFkYXRhCiAgICAgaWQ9Im1ldGFkYXRhOCI+PHJkZjpSREY+PGNjOldvcmsKICAgICAgICAgcmRmOmFib3V0PSIiPjxkYzpmb3JtYXQ+aW1hZ2Uvc3ZnK3htbDwvZGM6Zm9ybWF0PjxkYzp0eXBlCiAgICAgICAgICAgcmRmOnJlc291cmNlPSJodHRwOi8vcHVybC5vcmcvZGMvZGNtaXR5cGUvU3RpbGxJbWFnZSIgLz48L2NjOldvcms+PC9yZGY6UkRGPjwvbWV0YWRhdGE+PGRlZnMKICAgICBpZD0iZGVmczYiIC8+PGcKICAgICB0cmFuc2Zvcm09Im1hdHJpeCgxLDAsMCwtMSwwLDg1KSIKICAgICBpZD0iZzEwIj48ZwogICAgICAgdHJhbnNmb3JtPSJzY2FsZSgwLjEsMC4xKSIKICAgICAgIGlkPSJnMTIiPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gOTQuODU5NCw4MjguNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUxLDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzA5LDYuNjA5IC01LjQ2ODQsOC4zMjggLTAuNDIxOCwxLjE1NiAtMC44NTkzLDIuODc1IC0yLjg1OTMsMi44NzUgLTAuODc1LDAgLTIuNTkzOCwtMC41NjMgLTIuNTkzOCwtMi43MTkgMCwtMS4yOTcgMC44NTk0LC00Ljc1IDMuNTkzOCwtOC42MjUgbCAtNDguMjY1NywwIGMgLTIuNDUzMSwwIC00Ljg5MDYsMCAtNC44OTA2LC0yLjczNCAwLC0yLjU3OCAyLjU5MzgsLTIuNTc4IDQuODkwNiwtMi41NzggbCA0NS45Njg4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2OC45ODQ0LDc1MS4zMjggYyAxLjg3NSwtOC4wNDcgOC43NjU2LC05Ljc2NSAxMi4yMTg3LC05Ljc2NSA0LjU5MzgsMCA4LjA0NjksMy4wMTUgMTAuMzQzOCw3LjkwNiAyLjQzNzUsNS4xNzIgNC4yOTY5LDEzLjY0IDQuMjk2OSwxNC4wNzggMCwwLjcxOSAtMC41NjI1LDEuMjgxIC0xLjQyMTksMS4yODEgLTEuMjk2OSwwIC0xLjQzNzUsLTAuNzAzIC0yLjAxNTYsLTIuODU5IC0yLjU5MzgsLTkuOTIyIC01LjE3MTksLTE3LjUzMSAtMTAuOTIxOSwtMTcuNTMxIC00LjMxMjUsMCAtNC4zMTI1LDQuNzM0IC00LjMxMjUsNi42MDkgMCwzLjI5NyAwLjQzNzUsNC43MzQgMS44NzUsMTAuNzY2IDEsMy44OSAyLDcuNzY1IDIuODc1LDExLjc4MSBsIDUuODkwNiwyMy40MjIgYyAxLDMuNTkzIDEsMy44NzUgMSw0LjMxMiAwLDIuMTU2IC0xLjcxODcsMy41OTQgLTMuODc1LDMuNTk0IC00LjE3MTksMCAtNS4xNzE5LC0zLjU5NCAtNi4wMzEyLC03LjE4OCAtMS40Mzc1LC01LjYwOSAtOS4yMDMyLC0zNi40ODQgLTEwLjIwMzIsLTQxLjUxNSAtMC4xNDA2LDAgLTUuNzUsLTExLjc4MSAtMTYuMjM0MywtMTEuNzgxIC03LjQ2ODgsMCAtOC45MDYzLDYuNDY4IC04LjkwNjMsMTEuNzgxIDAsOC4xODcgNC4wMTU2LDE5LjY3MiA3Ljc1LDI5LjI5NyAxLjczNDQsNC42MDkgMi40NTMxLDYuNDY4IDIuNDUzMSw5LjM0MyAwLDYuMTcyIC00LjQ1MzEsMTEuNSAtMTEuMzU5MywxMS41IC0xMy4yMTg4LDAgLTE4LjUzMTMsLTIwLjg0MyAtMTguNTMxMywtMjEuOTg0IDAsLTAuNTc4IDAuNTc4MSwtMS4yOTcgMS41NzgxLC0xLjI5NyAxLjI5NjksMCAxLjQzNzUsMC41NzggMi4wMTU3LDIuNTk0IDMuNDUzMSwxMi4zNDQgOS4wNDY4LDE3LjgxMiAxNC41MTU2LDE3LjgxMiAxLjQzNzUsMCAzLjczNDQsLTAuMTU2IDMuNzM0NCwtNC43NSAwLC0zLjczNCAtMS41NzgyLC03Ljg5IC0zLjczNDQsLTEzLjM1OSAtNi4zMjgxLC0xNy4wOTQgLTcuMDQ2OSwtMjIuNTQ3IC03LjA0NjksLTI2Ljg1OSAwLC0xNC42NTcgMTEuMDYyNSwtMTYuOTUzIDE2Ljk1MzEsLTE2Ljk1MyA5LjE4NzUsMCAxNC4yMTg4LDYuMzI4IDE3LjA5MzgsOS43NjUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMjkuMjAzLDc4NS41NzggYyAwLDIuMzc1IDAsMi41NzggLTIuMjgxLDIuNTc4IC02LjE1NiwtNi4zNTkgLTE0LjkwNiwtNi4zNTkgLTE4LjA3OCwtNi4zNTkgbCAwLC0zLjA3OCBjIDEuOTg0LDAgNy44NDQsMCAxMy4wMTUsMi41NzggbCAwLC01MS40NTMgYyAwLC0zLjU3OCAtMC4yOTYsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3MSwwIDAsLTMuMDc4IGMgMy40NjgsMC4yOTcgMTIuMTI1LDAuMjk3IDE2LjA5MywwLjI5NyAzLjk2OSwwIDEyLjYxLDAgMTYuMDk0LC0wLjI5NyBsIDAsMy4wNzggLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTQgLTkuMjM1LDQuNzY2IGwgMCw1NS43MzQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAzNjkuOTY5LDc4OS41NDcgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNCAtMi40MzgsMi43MzQgLTQuNTk0LDIuNzM0IGwgLTg0LjYxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4IDAsLTIuNzM0IDIuNDUzLC0yLjczNCA0LjYwOSwtMi43MzQgbCA4NC42MSwwIHogbSAwLC0yNi43MTkgYyAyLjAxNSwwIDQuNTk0LDAgNC41OTQsMi41NzggMCwyLjczNSAtMi40MzgsMi43MzUgLTQuNTk0LDIuNzM1IGwgLTg0LjYxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTk0IDAsLTIuNzE5IDIuNDUzLC0yLjcxOSA0LjYwOSwtMi43MTkgbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNDY1LjIzNCw3NjAuMDk0IGMgLTAuNzE4LC0yLjQzOCAtMC43MTgsLTIuNzM1IC0yLjcxOCwtNS40NTMgLTMuMTcyLC00LjAzMiAtOS40ODUsLTEwLjIwMyAtMTYuMjM1LC0xMC4yMDMgLTUuODksMCAtOS4yMDMsNS4zMTIgLTkuMjAzLDEzLjc5NiAwLDcuODkxIDQuNDUzLDIzLjk4NSA3LjE4OCwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzNCwxNS4yMzQgOS40ODQsMCAxMS4zNTksLTExLjc4MSAxMS4zNTksLTEyLjkzNyAwLC0wLjE0MSAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NyBsIC03LjA0NywtMjguMTU2IHogbSA5LjIwNCwzNi43ODEgYyAtMS41NzksMy43MzQgLTUuNDY5LDkuNDg0IC0xMi45MzgsOS40ODQgLTE2LjIzNCwwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMyOCwtMjIuNTYyIDE4LjA5NCwtMjIuNTYyIDcuOTA2LDAgMTQuNjU2LDYuMTcxIDE4LjY3MiwxMC45MjEgMS40MzcsLTguNDg0IDguMTg3LC0xMC45MjEgMTIuNSwtMTAuOTIxIDQuMzEyLDAgNy43NjUsMi41OTMgMTAuMzQzLDcuNzY1IDIuMjk3LDQuODc1IDQuMzEzLDEzLjY0MSA0LjMxMywxNC4yMTkgMCwwLjcxOSAtMC41NzgsMS4yODEgLTEuNDM4LDEuMjgxIC0xLjI5NiwwIC0xLjQzNywtMC43MDMgLTIuMDE1LC0yLjg1OSAtMi4xNDEsLTguNDg1IC00Ljg3NSwtMTcuNTMxIC0xMC43NjYsLTE3LjUzMSAtNC4xNzIsMCAtNC40NTMsMy43MzQgLTQuNDUzLDYuNjA5IDAsMy4yOTcgMC40MjIsNC44NzUgMS43MTksMTAuNDg0IDEuMDE1LDMuNTk0IDEuNzM0LDYuNzUgMi44NzUsMTAuOTIyIDUuMzEyLDIxLjU0NyA2LjYwOSwyNi43MTkgNi42MDksMjcuNTc4IDAsMi4wMTYgLTEuNTc4LDMuNTk0IC0zLjczNCwzLjU5NCAtNC41OTQsMCAtNS43NSwtNS4wMzEgLTYuMDMxLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTI0LjIwMyw3ODUuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTc1LjIwMyw3ODUuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjcxLjg1OSw4MjguNzY2IGMgLTEuNzM0LC0xLjU3OCAtNy4wNDYsLTYuNjEgLTcuMDQ2LC04LjYyNSAwLC0xLjQzOCAxLjI5NiwtMi43MTkgMi43MzQsLTIuNzE5IDEuMjk3LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMsNC4yOTcgNy4zMjgsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzEsNi42MDkgLTUuNDY4LDguMzI4IC0wLjQyMiwxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44NzUsMCAtMi41OTMsLTAuNTYzIC0yLjU5MywtMi43MTkgMCwtMS4yOTcgMC44NTksLTQuNzUgMy41OTMsLTguNjI1IGwgLTQ4LjI2NSwwIGMgLTIuNDUzLDAgLTQuODkxLDAgLTQuODkxLC0yLjczNCAwLC0yLjU3OCAyLjU5NCwtMi41NzggNC44OTEsLTIuNTc4IGwgNDUuOTY4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgzMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NjYuNjU2LDc5Ni43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDMyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY5OC4yMDMsNzg1LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgxMy4zMTMsNzc2LjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDkzOS4yMzQsNzYwLjA5NCBjIC0wLjcxOCwtMi40MzggLTAuNzE4LC0yLjczNSAtMi43MTgsLTUuNDUzIC0zLjE3MiwtNC4wMzIgLTkuNDg1LC0xMC4yMDMgLTE2LjIzNSwtMTAuMjAzIC01Ljg5LDAgLTkuMjAzLDUuMzEyIC05LjIwMywxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xODgsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMzQsMTUuMjM0IDkuNDg0LDAgMTEuMzU5LC0xMS43ODEgMTEuMzU5LC0xMi45MzcgMCwtMC4xNDEgLTAuNDM3LC0yIC0wLjU3OCwtMi4yOTcgbCAtNy4wNDcsLTI4LjE1NiB6IG0gOS4yMDQsMzYuNzgxIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOTQsLTIyLjU2MiA3LjkwNiwwIDE0LjY1Niw2LjE3MSAxOC42NzIsMTAuOTIxIDEuNDM3LC04LjQ4NCA4LjE4NywtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxMiwwIDcuNzY1LDIuNTkzIDEwLjM0Myw3Ljc2NSAyLjI5Nyw0Ljg3NSA0LjMxMywxMy42NDEgNC4zMTMsMTQuMjE5IDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzOCwxLjI4MSAtMS4yOTYsMCAtMS40MzcsLTAuNzAzIC0yLjAxNSwtMi44NTkgLTIuMTQxLC04LjQ4NSAtNC44NzUsLTE3LjUzMSAtMTAuNzY2LC0xNy41MzEgLTQuMTcyLDAgLTQuNDUzLDMuNzM0IC00LjQ1Myw2LjYwOSAwLDMuMjk3IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NCAxLjAxNSwzLjU5NCAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMiA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDM4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk5OC4yMDMsNzg1LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjA5LDAgMTYuMDk5LC0wLjI5NyBsIDAsMy4wNzggLTMuMTksMCBjIC04Ljk0LDAgLTkuMjM3LDEuMDk0IC05LjIzNyw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTAzMi42MSw3MjkuNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4LC05LjE0IC0xOC41OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTcsLTUuNTYzIDUuMjYsLTUuNTYzIDEuNjksMCA1LjE2LDEuMjA0IDUuMTYsNS4yNjYgMCwyLjU5NCAtMS43OCw1LjE3MiAtNS4yNiw1LjE3MiAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDk0IDIuMjksNi40NTMgNy42NCwxMC4xMjUgMTMuNDEsMTAuMTI1IDkuMDUsMCAxMy4zMSwtOC4wNDcgMTMuMzEsLTE2LjE4NyAwLC03Ljk1MyAtNC45NywtMTUuNzk3IC0xMC40MywtMjEuOTUzIGwgLTE5LjA3LC0yMS4yNjYgYyAtMS4wOSwtMS4wOTQgLTEuMDksLTEuMjgxIC0xLjA5LC0zLjY3MiBsIDM2Ljg2LDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOSwtOC44NDMgLTAuNzEsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40NCwtMC43ODIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExNDUuODYsODI4Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE0MC42Niw3OTYuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE1NS42MSw3MjkuNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4LC05LjE0IC0xOC41OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTcsLTUuNTYzIDUuMjYsLTUuNTYzIDEuNjksMCA1LjE2LDEuMjA0IDUuMTYsNS4yNjYgMCwyLjU5NCAtMS43OCw1LjE3MiAtNS4yNiw1LjE3MiAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDk0IDIuMjksNi40NTMgNy42NCwxMC4xMjUgMTMuNDEsMTAuMTI1IDkuMDUsMCAxMy4zMSwtOC4wNDcgMTMuMzEsLTE2LjE4NyAwLC03Ljk1MyAtNC45NywtMTUuNzk3IC0xMC40MywtMjEuOTUzIGwgLTE5LjA3LC0yMS4yNjYgYyAtMS4wOSwtMS4wOTQgLTEuMDksLTEuMjgxIC0xLjA5LC0zLjY3MiBsIDM2Ljg2LDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOSwtOC44NDMgLTAuNzEsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40NCwtMC43ODIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDQ4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyODcuMzEsNzc2LjE4OCAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4IDAsMi43MzQgLTIuNDMsMi43MzQgLTQuNTksMi43MzQgbCAtMzkuNjYsMCAwLDM5LjY1NiBjIDAsMiAwLDQuNTk0IC0yLjU4LDQuNTk0IC0yLjczLDAgLTIuNzMsLTIuNDUzIC0yLjczLC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQsMCBjIC0yLjAyLDAgLTQuNjEsMCAtNC42MSwtMi41NzggMCwtMi43MzQgMi40NSwtMi43MzQgNC42MSwtMi43MzQgbCAzOS42NCwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OSwtNC41OTMgMi43MiwwIDIuNzIsMi40MzcgMi43Miw0LjU5MyBsIDAsMzkuNjU3IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTM5Ni40NCw3NDkuODkxIGMgMCw0LjE3MiAtMy40Niw3LjA0NyAtNi45MSw3LjA0NyAtNC4xNSwwIC03LjAzLC0zLjQ1NCAtNy4wMywtNi44OTEgMCwtNC4xNzIgMy40NSwtNy4wNDcgNi44OSwtNy4wNDcgNC4xNywwIDcuMDUsMy40NTMgNy4wNSw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDUyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0NjAuNDQsNzQ5Ljg5MSBjIDAsNC4xNzIgLTMuNDYsNy4wNDcgLTYuOTEsNy4wNDcgLTQuMTUsMCAtNy4wMywtMy40NTQgLTcuMDMsLTYuODkxIDAsLTQuMTcyIDMuNDUsLTcuMDQ3IDYuODksLTcuMDQ3IDQuMTcsMCA3LjA1LDMuNDUzIDcuMDUsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNTIzLjQ0LDc0OS44OTEgYyAwLDQuMTcyIC0zLjQ2LDcuMDQ3IC02LjkxLDcuMDQ3IC00LjE1LDAgLTcuMDMsLTMuNDU0IC03LjAzLC02Ljg5MSAwLC00LjE3MiAzLjQ1LC03LjA0NyA2Ljg5LC03LjA0NyA0LjE3LDAgNy4wNSwzLjQ1MyA3LjA1LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTYyNC4zMSw3NzYuMTg4IDM5LjY2LDAgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDM5LjY0LDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5LC00LjU5MyAyLjcyLDAgMi43MiwyLjQzNyAyLjcyLDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg1OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNzUxLjIzLDc2MC4wOTQgYyAtMC43MSwtMi40MzggLTAuNzEsLTIuNzM1IC0yLjcxLC01LjQ1MyAtMy4xOCwtNC4wMzIgLTkuNDksLTEwLjIwMyAtMTYuMjQsLTEwLjIwMyAtNS44OSwwIC05LjIsNS4zMTIgLTkuMiwxMy43OTYgMCw3Ljg5MSA0LjQ1LDIzLjk4NSA3LjE5LDMwLjAxNiA0Ljg5LDEwLjA2MyAxMS42NCwxNS4yMzQgMTcuMjMsMTUuMjM0IDkuNDgsMCAxMS4zNiwtMTEuNzgxIDExLjM2LC0xMi45MzcgMCwtMC4xNDEgLTAuNDQsLTIgLTAuNTgsLTIuMjk3IGwgLTcuMDUsLTI4LjE1NiB6IG0gOS4yMSwzNi43ODEgYyAtMS41OCwzLjczNCAtNS40Nyw5LjQ4NCAtMTIuOTQsOS40ODQgLTE2LjIzLDAgLTMzLjc1LC0yMC45ODQgLTMzLjc1LC00Mi4yMzQgMCwtMTQuMjM0IDguMzMsLTIyLjU2MiAxOC4wOSwtMjIuNTYyIDcuOTEsMCAxNC42Niw2LjE3MSAxOC42OCwxMC45MjEgMS40MywtOC40ODQgOC4xOCwtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxLDAgNy43NiwyLjU5MyAxMC4zNCw3Ljc2NSAyLjMsNC44NzUgNC4zMSwxMy42NDEgNC4zMSwxNC4yMTkgMCwwLjcxOSAtMC41OCwxLjI4MSAtMS40NCwxLjI4MSAtMS4yOSwwIC0xLjQzLC0wLjcwMyAtMi4wMSwtMi44NTkgLTIuMTQsLTguNDg1IC00Ljg4LC0xNy41MzEgLTEwLjc3LC0xNy41MzEgLTQuMTcsMCAtNC40NSwzLjczNCAtNC40NSw2LjYwOSAwLDMuMjk3IDAuNDIsNC44NzUgMS43MiwxMC40ODQgMS4wMSwzLjU5NCAxLjczLDYuNzUgMi44NywxMC45MjIgNS4zMiwyMS41NDcgNi42MSwyNi43MTkgNi42MSwyNy41NzggMCwyLjAxNiAtMS41NywzLjU5NCAtMy43MywzLjU5NCAtNC41OSwwIC01Ljc1LC01LjAzMSAtNi4wMywtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDYwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4MTEuMiw3ODUuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4LDIuNTc4IC02LjE1LC02LjM1OSAtMTQuOSwtNi4zNTkgLTE4LjA4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45OSwwIDcuODUsMCAxMy4wMiwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjMsLTQuNzY2IC05LjI1LC00Ljc2NiBsIC0zLjE3LDAgMCwtMy4wNzggYyAzLjQ3LDAuMjk3IDEyLjEyLDAuMjk3IDE2LjA5LDAuMjk3IDMuOTcsMCAxMi42MSwwIDE2LjEsLTAuMjk3IGwgMCwzLjA3OCAtMy4xOSwwIGMgLTguOTQsMCAtOS4yNCwxLjA5NCAtOS4yNCw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNjIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTg0MC43Myw3MjcuODU5IGMgLTAuMjksLTEuNDg0IC0wLjg5LC0zLjc2NSAtMC44OSwtNC4yNjUgMCwtMS43OTcgMS4zOSwtMi42ODggMi44OSwtMi42ODggMS4xOSwwIDIuOTcsMC43OTcgMy42OCwyLjc4MiAwLjA5LDAuMjAzIDEuMjgsNC44NzUgMS44OSw3LjM1OSBsIDIuMTgsOC45MzcgYyAwLjYsMi4xODggMS4xOSw0LjM2IDEuNjksNi42NTcgMC4zOSwxLjY4NyAxLjE5LDQuNTYyIDEuMjgsNC45NjggMS41LDMuMDc5IDYuNzcsMTIuMTEgMTYuMjEsMTIuMTEgNC40NywwIDUuMzYsLTMuNjcyIDUuMzYsLTYuOTUzIDAsLTYuMTU3IC00Ljg4LC0xOC44NzUgLTYuNDYsLTIzLjE0MSAtMC45LC0yLjI4MSAtMSwtMy40ODQgLTEsLTQuNTc4IDAsLTQuNjU2IDMuNDksLTguMTQxIDguMTQsLTguMTQxIDkuMzUsMCAxMy4wMiwxNC41IDEzLjAyLDE1LjI5NyAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEsLTAuMjk3IC0xLjQ4LC0xLjc5NyAtMiwtNi43NSAtNS4yNywtMTIuMzEyIC0xMC4xNCwtMTIuMzEyIC0xLjY5LDAgLTIuMzksMSAtMi4zOSwzLjI4MSAwLDIuNDg0IDAuOSw0Ljg1OSAxLjc5LDcuMDQ3IDEuODksNS4yNjYgNi4wNywxNi4xODcgNi4wNywyMS44NTkgMCw2LjY1NyAtNC4yOSwxMC42MjUgLTExLjQzLDEwLjYyNSAtOC45NSwwIC0xMy44MSwtNi4zNTkgLTE1LjUsLTguNjQgLTAuNSw1LjU2MiAtNC41Nyw4LjY0IC05LjE0LDguNjQgLTQuNTgsMCAtNi40NSwtMy44NzUgLTcuNDUsLTUuNjU2IC0xLjU5LC0zLjM3NSAtMi45OCwtOS4yNSAtMi45OCwtOS42NDEgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjExIDEuNjksMi4yOTcgMS42OCw3LjA0NyAzLjY3LDExLjgxMyA3LjI1LDExLjgxMyAxLjk4LDAgMy4wNywtMS4yODEgMy4wNywtNC41NjMgMCwtMi4wOTMgLTAuMjksLTMuMTg3IC0xLjU5LC04LjM0MyBsIC01Ljc3LC0yMi45NTQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg2NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTY3Ljg2LDgyOC43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5NjIuNjYsNzk2LjczNCBjIDAsOS4wNDcgLTQuNjEsOS42MjUgLTUuNzUsOS42MjUgLTMuNDYsMCAtNi42MSwtMy40NTMgLTYuNjEsLTYuMzI4IDAsLTEuNzE4IDEsLTIuNzM0IDEuNTgsLTMuMjk3IDEuNDMsLTEuMjk2IDUuMTcsLTUuMTcxIDUuMTcsLTEyLjY1NiAwLC02LjAzMSAtOC42MywtMzkuNjQgLTI1Ljg2LC0zOS42NCAtOC43NywwIC0xMC40OSw3LjMyOCAtMTAuNDksMTIuNjQgMCw3LjE4OCAzLjMsMTcuMjM1IDcuMTksMjcuNTc4IDIuMyw1Ljg5MSAyLjg4LDcuMzI4IDIuODgsMTAuMjAzIDAsNi4wMzIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MyAtMTguNTMsLTIxLjk4NCAwLC0wLjU3OCAwLjU3LC0xLjI5NyAxLjU3LC0xLjI5NyAxLjMsMCAxLjQ0LDAuNTc4IDIuMDIsMi41OTQgMy40NSwxMi4zNDQgOS4wNSwxNy44MTIgMTQuNTEsMTcuODEyIDEuMjksMCAzLjc0LDAgMy43NCwtNC43NSAwLC0zLjczNCAtMS41OCwtNy44OSAtMy43NCwtMTMuMzU5IC02LjksLTE4LjM5MSAtNi45LC0yMi44NDQgLTYuOSwtMjYuMjgxIDAsLTMuMTcyIDAuNDQsLTkuMDQ3IDQuODksLTEzLjA3OCA1LjE3LC00LjQ1MyAxMi4zNiwtNC40NTMgMTMuNjQsLTQuNDUzIDIzLjg2LDAgMzIuMDUsNDYuOTg0IDMyLjA1LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDY4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE5NzMuNzMsNzI3Ljg1OSBjIC0wLjI5LC0xLjQ4NCAtMC44OSwtMy43NjUgLTAuODksLTQuMjY1IDAsLTEuNzk3IDEuMzksLTIuNjg4IDIuODksLTIuNjg4IDEuMTksMCAyLjk3LDAuNzk3IDMuNjgsMi43ODIgMC4wOSwwLjIwMyAxLjI4LDQuODc1IDEuODksNy4zNTkgbCAyLjE4LDguOTM3IGMgMC42LDIuMTg4IDEuMTksNC4zNiAxLjY5LDYuNjU3IDAuMzksMS42ODcgMS4xOSw0LjU2MiAxLjI4LDQuOTY4IDEuNSwzLjA3OSA2Ljc3LDEyLjExIDE2LjIxLDEyLjExIDQuNDcsMCA1LjM2LC0zLjY3MiA1LjM2LC02Ljk1MyAwLC02LjE1NyAtNC44OCwtMTguODc1IC02LjQ2LC0yMy4xNDEgLTAuOSwtMi4yODEgLTEsLTMuNDg0IC0xLC00LjU3OCAwLC00LjY1NiAzLjQ5LC04LjE0MSA4LjE0LC04LjE0MSA5LjM1LDAgMTMuMDIsMTQuNSAxMy4wMiwxNS4yOTcgMCwxIC0wLjg5LDEgLTEuMTksMSAtMSwwIC0xLC0wLjI5NyAtMS40OCwtMS43OTcgLTIsLTYuNzUgLTUuMjcsLTEyLjMxMiAtMTAuMTQsLTEyLjMxMiAtMS42OSwwIC0yLjM5LDEgLTIuMzksMy4yODEgMCwyLjQ4NCAwLjksNC44NTkgMS43OSw3LjA0NyAxLjg5LDUuMjY2IDYuMDcsMTYuMTg3IDYuMDcsMjEuODU5IDAsNi42NTcgLTQuMjksMTAuNjI1IC0xMS40MywxMC42MjUgLTguOTUsMCAtMTMuODEsLTYuMzU5IC0xNS41LC04LjY0IC0wLjUsNS41NjIgLTQuNTcsOC42NCAtOS4xNCw4LjY0IC00LjU4LDAgLTYuNDUsLTMuODc1IC03LjQ1LC01LjY1NiAtMS41OSwtMy4zNzUgLTIuOTgsLTkuMjUgLTIuOTgsLTkuNjQxIDAsLTEgMSwtMSAxLjIsLTEgMC45OCwwIDEuMDksMC4xMSAxLjY5LDIuMjk3IDEuNjgsNy4wNDcgMy42NywxMS44MTMgNy4yNSwxMS44MTMgMS45OCwwIDMuMDcsLTEuMjgxIDMuMDcsLTQuNTYzIDAsLTIuMDkzIC0wLjI5LC0zLjE4NyAtMS41OSwtOC4zNDMgbCAtNS43NywtMjIuOTU0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA1NS40NCw3OTguMDE2IGMgMCwzLjg5IC0zLjMxLDYuOTA2IC02LjkxLDYuOTA2IC00LjE1LDAgLTcuMDMsLTMuMzEzIC03LjAzLC02LjkwNiAwLC00LjMxMyAzLjU5LC03LjAzMiA2Ljg5LC03LjAzMiAzLjg4LDAgNy4wNSwzLjAxNiA3LjA1LDcuMDMyIHogbSAtMi40NiwtNTMuNTc4IGMgMCwtNS4wMzIgMCwtMTUuMjM1IC04Ljc1LC0yNiAtMC44NywtMS4xNTcgLTAuODcsLTEuNDM4IC0wLjg3LC0xLjczNSAwLC0wLjcwMyAwLjcyLC0xLjQyMiAxLjQ0LC0xLjQyMiAxLjAxLDAgMTEuMDYsMTAuNjI1IDExLjA2LDI3LjQzOCAwLDUuMzEyIC0wLjQyLDE0LjIxOSAtNy40NywxNC4yMTkgLTQuMTYsMCAtNi44OSwtMy4xNTcgLTYuODksLTYuODkxIDAsLTMuODkxIDIuNzMsLTcuMDQ3IDcuMDMsLTcuMDQ3IDIuNzQsMCAzLjc0LDAuODU5IDQuNDUsMS40MzgiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg3MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA5NC44NTk0LDYwMi43NjYgYyAtMS43MzQ0LC0xLjU3OCAtNy4wNDY5LC02LjYxIC03LjA0NjksLTguNjI1IDAsLTEuNDM4IDEuMjk2OSwtMi43MTkgMi43MzQ0LC0yLjcxOSAxLjI5NjksMCAxLjg3NSwwLjg1OSAyLjg3NSwyLjI5NyAzLjQ1MzEsNC4yOTcgNy4zMjgxLDcuMDMxIDEwLjYyNTEsOC45MDYgMS40MzcsMC44NTkgMi40NTMsMS4yODEgMi40NTMsMi44NzUgMCwxLjI4MSAtMS4xNTYsMiAtMi4wMTYsMi43MTkgLTQuMDMxLDIuNzM0IC01LjAzMDksNi42MDkgLTUuNDY4NCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY4Ljk4NDQsNTI1LjMyOCBjIDEuODc1LC04LjA0NyA4Ljc2NTYsLTkuNzY1IDEyLjIxODcsLTkuNzY1IDQuNTkzOCwwIDguMDQ2OSwzLjAxNSAxMC4zNDM4LDcuOTA2IDIuNDM3NSw1LjE3MiA0LjI5NjksMTMuNjQgNC4yOTY5LDE0LjA3OCAwLDAuNzE5IC0wLjU2MjUsMS4yODEgLTEuNDIxOSwxLjI4MSAtMS4yOTY5LDAgLTEuNDM3NSwtMC43MDMgLTIuMDE1NiwtMi44NTkgLTIuNTkzOCwtOS45MjIgLTUuMTcxOSwtMTcuNTMxIC0xMC45MjE5LC0xNy41MzEgLTQuMzEyNSwwIC00LjMxMjUsNC43MzQgLTQuMzEyNSw2LjYwOSAwLDMuMjk3IDAuNDM3NSw0LjczNCAxLjg3NSwxMC43NjYgMSwzLjg5IDIsNy43NjUgMi44NzUsMTEuNzgxIGwgNS44OTA2LDIzLjQyMiBjIDEsMy41OTMgMSwzLjg3NSAxLDQuMzEyIDAsMi4xNTYgLTEuNzE4NywzLjU5NCAtMy44NzUsMy41OTQgLTQuMTcxOSwwIC01LjE3MTksLTMuNTk0IC02LjAzMTIsLTcuMTg4IC0xLjQzNzUsLTUuNjA5IC05LjIwMzIsLTM2LjQ4NCAtMTAuMjAzMiwtNDEuNTE1IC0wLjE0MDYsMCAtNS43NSwtMTEuNzgxIC0xNi4yMzQzLC0xMS43ODEgLTcuNDY4OCwwIC04LjkwNjMsNi40NjggLTguOTA2MywxMS43ODEgMCw4LjE4NyA0LjAxNTYsMTkuNjcyIDcuNzUsMjkuMjk3IDEuNzM0NCw0LjYwOSAyLjQ1MzEsNi40NjggMi40NTMxLDkuMzQzIDAsNi4xNzIgLTQuNDUzMSwxMS41IC0xMS4zNTkzLDExLjUgLTEzLjIxODgsMCAtMTguNTMxMywtMjAuODQzIC0xOC41MzEzLC0yMS45ODQgMCwtMC41NzggMC41NzgxLC0xLjI5NyAxLjU3ODEsLTEuMjk3IDEuMjk2OSwwIDEuNDM3NSwwLjU3OCAyLjAxNTcsMi41OTQgMy40NTMxLDEyLjM0NCA5LjA0NjgsMTcuODEyIDE0LjUxNTYsMTcuODEyIDEuNDM3NSwwIDMuNzM0NCwtMC4xNTYgMy43MzQ0LC00Ljc1IDAsLTMuNzM0IC0xLjU3ODIsLTcuODkgLTMuNzM0NCwtMTMuMzU5IC02LjMyODEsLTE3LjA5NCAtNy4wNDY5LC0yMi41NDcgLTcuMDQ2OSwtMjYuODU5IDAsLTE0LjY1NyAxMS4wNjI1LC0xNi45NTMgMTYuOTUzMSwtMTYuOTUzIDkuMTg3NSwwIDE0LjIxODgsNi4zMjggMTcuMDkzOCw5Ljc2NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExMi42MDksNTAzLjY1NiAxMC41MzIsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDY4LDE5LjA3OCAyMS40NjgsMjkuMDE2IDAsMTEuMzI4IC04Ljk1MywxOS4yNjUgLTIxLjA2MiwxOS4yNjUgLTExLjIzNCwwIC0xOC41NzgsLTkuMTQgLTE4LjU3OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTY5LC01LjU2MyA1LjI2NSwtNS41NjMgMS42ODgsMCA1LjE1NywxLjIwNCA1LjE1Nyw1LjI2NiAwLDIuNTk0IC0xLjc4Miw1LjE3MiAtNS4yNjYsNS4xNzIgLTAuNzgxLDAgLTAuOTg0LDAgLTEuMjgxLC0wLjA5NCAyLjI4MSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MDYsMTAuMTI1IDkuMDQ3LDAgMTMuMzEzLC04LjA0NyAxMy4zMTMsLTE2LjE4NyAwLC03Ljk1MyAtNC45NjksLTE1Ljc5NyAtMTAuNDM4LC0yMS45NTMgbCAtMTkuMDYyLC0yMS4yNjYgYyAtMS4wOTQsLTEuMDk0IC0xLjA5NCwtMS4yODEgLTEuMDk0LC0zLjY3MiBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MSAtMi40ODQsMCBjIC0wLjUsLTIuOTg0IC0xLjIwMywtNy4zNDMgLTIuMTg3LC04Ljg0MyAtMC43MDQsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40MzgsLTAuNzgyIGwgLTE3Ljg5MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoNzgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzY5Ljk2OSw1NjMuNTQ3IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzQgLTIuNDM4LDIuNzM0IC00LjU5NCwyLjczNCBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU3OCAwLC0yLjczNCAyLjQ1MywtMi43MzQgNC42MDksLTIuNzM0IGwgODQuNjEsMCB6IG0gMCwtMjYuNzE5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4IDAsMi43MzUgLTIuNDM4LDIuNzM1IC00LjU5NCwyLjczNSBsIC04NC42MSwwIGMgLTIuMDE1LDAgLTQuNjA5LDAgLTQuNjA5LC0yLjU5NCAwLC0yLjcxOSAyLjQ1MywtMi43MTkgNC42MDksLTIuNzE5IGwgODQuNjEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ2NS4yMzQsNTM0LjA5NCBjIC0wLjcxOCwtMi40MzggLTAuNzE4LC0yLjczNSAtMi43MTgsLTUuNDUzIC0zLjE3MiwtNC4wMzIgLTkuNDg1LC0xMC4yMDMgLTE2LjIzNSwtMTAuMjAzIC01Ljg5LDAgLTkuMjAzLDUuMzEyIC05LjIwMywxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xODgsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMzQsMTUuMjM0IDkuNDg0LDAgMTEuMzU5LC0xMS43ODEgMTEuMzU5LC0xMi45MzcgMCwtMC4xNDEgLTAuNDM3LC0yIC0wLjU3OCwtMi4yOTcgbCAtNy4wNDcsLTI4LjE1NiB6IG0gOS4yMDQsMzYuNzgxIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOTQsLTIyLjU2MiA3LjkwNiwwIDE0LjY1Niw2LjE3MSAxOC42NzIsMTAuOTIxIDEuNDM3LC04LjQ4NCA4LjE4NywtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxMiwwIDcuNzY1LDIuNTkzIDEwLjM0Myw3Ljc2NSAyLjI5Nyw0Ljg3NSA0LjMxMywxMy42NDEgNC4zMTMsMTQuMjE5IDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzOCwxLjI4MSAtMS4yOTYsMCAtMS40MzcsLTAuNzAzIC0yLjAxNSwtMi44NTkgLTIuMTQxLC04LjQ4NSAtNC44NzUsLTE3LjUzMSAtMTAuNzY2LC0xNy41MzEgLTQuMTcyLDAgLTQuNDUzLDMuNzM0IC00LjQ1Myw2LjYwOSAwLDMuMjk3IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NCAxLjAxNSwzLjU5NCAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMiA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDgyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDUwNy42MDksNTAzLjY1NiAxMC41MzIsMTAuMjE5IGMgMTUuNSwxMy43MTkgMjEuNDY4LDE5LjA3OCAyMS40NjgsMjkuMDE2IDAsMTEuMzI4IC04Ljk1MywxOS4yNjUgLTIxLjA2MiwxOS4yNjUgLTExLjIzNCwwIC0xOC41NzgsLTkuMTQgLTE4LjU3OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTY5LC01LjU2MyA1LjI2NSwtNS41NjMgMS42ODgsMCA1LjE1NywxLjIwNCA1LjE1Nyw1LjI2NiAwLDIuNTk0IC0xLjc4Miw1LjE3MiAtNS4yNjYsNS4xNzIgLTAuNzgxLDAgLTAuOTg0LDAgLTEuMjgxLC0wLjA5NCAyLjI4MSw2LjQ1MyA3LjY0LDEwLjEyNSAxMy40MDYsMTAuMTI1IDkuMDQ3LDAgMTMuMzEzLC04LjA0NyAxMy4zMTMsLTE2LjE4NyAwLC03Ljk1MyAtNC45NjksLTE1Ljc5NyAtMTAuNDM4LC0yMS45NTMgbCAtMTkuMDYyLC0yMS4yNjYgYyAtMS4wOTQsLTEuMDk0IC0xLjA5NCwtMS4yODEgLTEuMDk0LC0zLjY3MiBsIDM2Ljg1OSwwIDIuNzgxLDE3LjI4MSAtMi40ODQsMCBjIC0wLjUsLTIuOTg0IC0xLjIwMywtNy4zNDMgLTIuMTg3LC04Ljg0MyAtMC43MDQsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40MzgsLTAuNzgyIGwgLTE3Ljg5MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTc1LjIwMyw1NTkuNTc4IGMgMCwyLjM3NSAwLDIuNTc4IC0yLjI4MSwyLjU3OCAtNi4xNTYsLTYuMzU5IC0xNC45MDYsLTYuMzU5IC0xOC4wNzgsLTYuMzU5IGwgMCwtMy4wNzggYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4IGwgMCwtNTEuNDUzIGMgMCwtMy41NzggLTAuMjk2LC00Ljc2NiAtOS4yNSwtNC43NjYgbCAtMy4xNzEsMCAwLC0zLjA3OCBjIDMuNDY4LDAuMjk3IDEyLjEyNSwwLjI5NyAxNi4wOTMsMC4yOTcgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTcgbCAwLDMuMDc4IC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDk0IC05LjIzNSw0Ljc2NiBsIDAsNTUuNzM0IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoODYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjcxLjg1OSw2MDIuNzY2IGMgLTEuNzM0LC0xLjU3OCAtNy4wNDYsLTYuNjEgLTcuMDQ2LC04LjYyNSAwLC0xLjQzOCAxLjI5NiwtMi43MTkgMi43MzQsLTIuNzE5IDEuMjk3LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMsNC4yOTcgNy4zMjgsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzEsNi42MDkgLTUuNDY4LDguMzI4IC0wLjQyMiwxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44NzUsMCAtMi41OTMsLTAuNTYzIC0yLjU5MywtMi43MTkgMCwtMS4yOTcgMC44NTksLTQuNzUgMy41OTMsLTguNjI1IGwgLTQ4LjI2NSwwIGMgLTIuNDUzLDAgLTQuODkxLDAgLTQuODkxLC0yLjczNCAwLC0yLjU3OCAyLjU5NCwtMi41NzggNC44OTEsLTIuNTc4IGwgNDUuOTY4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGg4OCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA2NjYuNjU2LDU3MC43MzQgYyAwLDkuMDQ3IC00LjYwOSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NTMsMCAtNi42MDksLTMuNDUzIC02LjYwOSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41NzgsLTMuMjk3IDEuNDM4LC0xLjI5NiA1LjE3MiwtNS4xNzEgNS4xNzIsLTEyLjY1NiAwLC02LjAzMSAtOC42MjUsLTM5LjY0IC0yNS44NTksLTM5LjY0IC04Ljc2NiwwIC0xMC40ODUsNy4zMjggLTEwLjQ4NSwxMi42NCAwLDcuMTg4IDMuMjk3LDE3LjIzNSA3LjE4OCwyNy41NzggMi4yOTcsNS44OTEgMi44NzUsNy4zMjggMi44NzUsMTAuMjAzIDAsNi4wMzIgLTQuMzEzLDExLjUgLTExLjM2LDExLjUgLTEzLjIxOCwwIC0xOC41MzEsLTIwLjg0MyAtMTguNTMxLC0yMS45ODQgMCwtMC41NzggMC41NzgsLTEuMjk3IDEuNTc4LC0xLjI5NyAxLjI5NywwIDEuNDM4LDAuNTc4IDIuMDE2LDIuNTk0IDMuNDUzLDEyLjM0NCA5LjA0NywxNy44MTIgMTQuNTE1LDE3LjgxMiAxLjI4MiwwIDMuNzM1LDAgMy43MzUsLTQuNzUgMCwtMy43MzQgLTEuNTc4LC03Ljg5IC0zLjczNSwtMTMuMzU5IC02LjkwNiwtMTguMzkxIC02LjkwNiwtMjIuODQ0IC02LjkwNiwtMjYuMjgxIDAsLTMuMTcyIDAuNDM4LC05LjA0NyA0Ljg5MSwtMTMuMDc4IDUuMTcyLC00LjQ1MyAxMi4zNTksLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA0Nyw0Ni45ODQgMzIuMDQ3LDU1LjE3MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDY5OC4yMDMsNTU5LjU3OCBjIDAsMi4zNzUgMCwyLjU3OCAtMi4yODEsMi41NzggLTYuMTU2LC02LjM1OSAtMTQuOTA2LC02LjM1OSAtMTguMDc4LC02LjM1OSBsIDAsLTMuMDc4IGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3OCBsIDAsLTUxLjQ1MyBjIDAsLTMuNTc4IC0wLjI5NiwtNC43NjYgLTkuMjUsLTQuNzY2IGwgLTMuMTcxLDAgMCwtMy4wNzggYyAzLjQ2OCwwLjI5NyAxMi4xMjUsMC4yOTcgMTYuMDkzLDAuMjk3IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk3IGwgMCwzLjA3OCAtMy4xODcsMCBjIC04LjkzOCwwIC05LjIzNSwxLjA5NCAtOS4yMzUsNC43NjYgbCAwLDU1LjczNCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDkyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDgxMy4zMTMsNTUwLjE4OCAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3OCAwLDIuNzM0IC0yLjQzOCwyLjczNCAtNC41OTQsMi43MzQgbCAtMzkuNjU2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41NzksNC41OTQgLTIuNzM0LDAgLTIuNzM0LC0yLjQ1MyAtMi43MzQsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NDEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzggMCwtMi43MzQgMi40NTMsLTIuNzM0IDQuNjA5LC0yLjczNCBsIDM5LjY0MSwwIDAsLTM5LjY1NyBjIDAsLTIgMCwtNC41OTMgMi41OTQsLTQuNTkzIDIuNzE5LDAgMi43MTksMi40MzcgMi43MTksNC41OTMgbCAwLDM5LjY1NyIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDkzOS4yMzQsNTM0LjA5NCBjIC0wLjcxOCwtMi40MzggLTAuNzE4LC0yLjczNSAtMi43MTgsLTUuNDUzIC0zLjE3MiwtNC4wMzIgLTkuNDg1LC0xMC4yMDMgLTE2LjIzNSwtMTAuMjAzIC01Ljg5LDAgLTkuMjAzLDUuMzEyIC05LjIwMywxMy43OTYgMCw3Ljg5MSA0LjQ1MywyMy45ODUgNy4xODgsMzAuMDE2IDQuODksMTAuMDYzIDExLjY0LDE1LjIzNCAxNy4yMzQsMTUuMjM0IDkuNDg0LDAgMTEuMzU5LC0xMS43ODEgMTEuMzU5LC0xMi45MzcgMCwtMC4xNDEgLTAuNDM3LC0yIC0wLjU3OCwtMi4yOTcgbCAtNy4wNDcsLTI4LjE1NiB6IG0gOS4yMDQsMzYuNzgxIGMgLTEuNTc5LDMuNzM0IC01LjQ2OSw5LjQ4NCAtMTIuOTM4LDkuNDg0IC0xNi4yMzQsMCAtMzMuNzUsLTIwLjk4NCAtMzMuNzUsLTQyLjIzNCAwLC0xNC4yMzQgOC4zMjgsLTIyLjU2MiAxOC4wOTQsLTIyLjU2MiA3LjkwNiwwIDE0LjY1Niw2LjE3MSAxOC42NzIsMTAuOTIxIDEuNDM3LC04LjQ4NCA4LjE4NywtMTAuOTIxIDEyLjUsLTEwLjkyMSA0LjMxMiwwIDcuNzY1LDIuNTkzIDEwLjM0Myw3Ljc2NSAyLjI5Nyw0Ljg3NSA0LjMxMywxMy42NDEgNC4zMTMsMTQuMjE5IDAsMC43MTkgLTAuNTc4LDEuMjgxIC0xLjQzOCwxLjI4MSAtMS4yOTYsMCAtMS40MzcsLTAuNzAzIC0yLjAxNSwtMi44NTkgLTIuMTQxLC04LjQ4NSAtNC44NzUsLTE3LjUzMSAtMTAuNzY2LC0xNy41MzEgLTQuMTcyLDAgLTQuNDUzLDMuNzM0IC00LjQ1Myw2LjYwOSAwLDMuMjk3IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NCAxLjAxNSwzLjU5NCAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMiA1LjMxMiwyMS41NDcgNi42MDksMjYuNzE5IDYuNjA5LDI3LjU3OCAwLDIuMDE2IC0xLjU3OCwzLjU5NCAtMy43MzQsMy41OTQgLTQuNTk0LDAgLTUuNzUsLTUuMDMxIC02LjAzMSwtNi43NSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk4MS42MDksNTAzLjY1NiAxMC41MzIsMTAuMjE5IGMgMTUuNDk5LDEzLjcxOSAyMS40NjksMTkuMDc4IDIxLjQ2OSwyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNjMsMTkuMjY1IC0xMS4yMzQsMCAtMTguNTc4LC05LjE0IC0xOC41NzgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk2OSwtNS41NjMgNS4yNjUsLTUuNTYzIDEuNjg4LDAgNS4xNTcsMS4yMDQgNS4xNTcsNS4yNjYgMCwyLjU5NCAtMS43ODIsNS4xNzIgLTUuMjY2LDUuMTcyIC0wLjc4MSwwIC0wLjk4NCwwIC0xLjI4MSwtMC4wOTQgMi4yODEsNi40NTMgNy42NCwxMC4xMjUgMTMuNDA2LDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTY2LC0xNS43OTcgLTEwLjQzNSwtMjEuOTUzIGwgLTE5LjA2MiwtMjEuMjY2IGMgLTEuMDk0LC0xLjA5NCAtMS4wOTQsLTEuMjgxIC0xLjA5NCwtMy42NzIgbCAzNi44NjEsMCAyLjc4LDE3LjI4MSAtMi40OCwwIGMgLTAuNSwtMi45ODQgLTEuMjEsLTcuMzQzIC0yLjE5LC04Ljg0MyAtMC43MSwtMC43ODIgLTcuMjUsLTAuNzgyIC05LjQ0LC0wLjc4MiBsIC0xNy44OTEsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDk4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMzIuNjEsNTAzLjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE0NS44Niw2MDIuNzY2IGMgLTEuNzMsLTEuNTc4IC03LjA1LC02LjYxIC03LjA1LC04LjYyNSAwLC0xLjQzOCAxLjMsLTIuNzE5IDIuNzQsLTIuNzE5IDEuMjksMCAxLjg3LDAuODU5IDIuODcsMi4yOTcgMy40Niw0LjI5NyA3LjMzLDcuMDMxIDEwLjYzLDguOTA2IDEuNDMsMC44NTkgMi40NSwxLjI4MSAyLjQ1LDIuODc1IDAsMS4yODEgLTEuMTYsMiAtMi4wMiwyLjcxOSAtNC4wMywyLjczNCAtNS4wMyw2LjYwOSAtNS40Niw4LjMyOCAtMC40MywxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44OCwwIC0yLjYsLTAuNTYzIC0yLjYsLTIuNzE5IDAsLTEuMjk3IDAuODYsLTQuNzUgMy42LC04LjYyNSBsIC00OC4yNywwIGMgLTIuNDUsMCAtNC44OSwwIC00Ljg5LC0yLjczNCAwLC0yLjU3OCAyLjU5LC0yLjU3OCA0Ljg5LC0yLjU3OCBsIDQ1Ljk3LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTE0MC42Niw1NzAuNzM0IGMgMCw5LjA0NyAtNC42MSw5LjYyNSAtNS43NSw5LjYyNSAtMy40NiwwIC02LjYxLC0zLjQ1MyAtNi42MSwtNi4zMjggMCwtMS43MTggMSwtMi43MzQgMS41OCwtMy4yOTcgMS40MywtMS4yOTYgNS4xNywtNS4xNzEgNS4xNywtMTIuNjU2IDAsLTYuMDMxIC04LjYzLC0zOS42NCAtMjUuODYsLTM5LjY0IC04Ljc3LDAgLTEwLjQ5LDcuMzI4IC0xMC40OSwxMi42NCAwLDcuMTg4IDMuMywxNy4yMzUgNy4xOSwyNy41NzggMi4zLDUuODkxIDIuODgsNy4zMjggMi44OCwxMC4yMDMgMCw2LjAzMiAtNC4zMiwxMS41IC0xMS4zNiwxMS41IC0xMy4yMiwwIC0xOC41MywtMjAuODQzIC0xOC41MywtMjEuOTg0IDAsLTAuNTc4IDAuNTcsLTEuMjk3IDEuNTcsLTEuMjk3IDEuMywwIDEuNDQsMC41NzggMi4wMiwyLjU5NCAzLjQ1LDEyLjM0NCA5LjA1LDE3LjgxMiAxNC41MSwxNy44MTIgMS4yOSwwIDMuNzQsMCAzLjc0LC00Ljc1IDAsLTMuNzM0IC0xLjU4LC03Ljg5IC0zLjc0LC0xMy4zNTkgLTYuOSwtMTguMzkxIC02LjksLTIyLjg0NCAtNi45LC0yNi4yODEgMCwtMy4xNzIgMC40NCwtOS4wNDcgNC44OSwtMTMuMDc4IDUuMTcsLTQuNDUzIDEyLjM2LC00LjQ1MyAxMy42NCwtNC40NTMgMjMuODYsMCAzMi4wNSw0Ni45ODQgMzIuMDUsNTUuMTcxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTA0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDExNTUuNjEsNTAzLjY1NiAxMC41MywxMC4yMTkgYyAxNS41LDEzLjcxOSAyMS40NywxOS4wNzggMjEuNDcsMjkuMDE2IDAsMTEuMzI4IC04Ljk1LDE5LjI2NSAtMjEuMDYsMTkuMjY1IC0xMS4yNCwwIC0xOC41OCwtOS4xNCAtMTguNTgsLTE3Ljk4NCAwLC01LjU2MyA0Ljk3LC01LjU2MyA1LjI2LC01LjU2MyAxLjY5LDAgNS4xNiwxLjIwNCA1LjE2LDUuMjY2IDAsMi41OTQgLTEuNzgsNS4xNzIgLTUuMjYsNS4xNzIgLTAuNzksMCAtMC45OSwwIC0xLjI5LC0wLjA5NCAyLjI5LDYuNDUzIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ3IDEzLjMxLC0xNi4xODcgMCwtNy45NTMgLTQuOTcsLTE1Ljc5NyAtMTAuNDMsLTIxLjk1MyBsIC0xOS4wNywtMjEuMjY2IGMgLTEuMDksLTEuMDk0IC0xLjA5LC0xLjI4MSAtMS4wOSwtMy42NzIgbCAzNi44NiwwIDIuNzgsMTcuMjgxIC0yLjQ4LDAgYyAtMC41LC0yLjk4NCAtMS4yMSwtNy4zNDMgLTIuMTksLTguODQzIC0wLjcxLC0wLjc4MiAtNy4yNSwtMC43ODIgLTkuNDQsLTAuNzgyIGwgLTE3Ljg5LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTI4Ny4zMSw1NTAuMTg4IDM5LjY2LDAgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDM5LjY0LDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5LC00LjU5MyAyLjcyLDAgMi43MiwyLjQzNyAyLjcyLDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTM5Ni40NCw1MjMuODkxIGMgMCw0LjE3MiAtMy40Niw3LjA0NyAtNi45MSw3LjA0NyAtNC4xNSwwIC03LjAzLC0zLjQ1NCAtNy4wMywtNi44OTEgMCwtNC4xNzIgMy40NSwtNy4wNDcgNi44OSwtNy4wNDcgNC4xNywwIDcuMDUsMy40NTMgNy4wNSw2Ljg5MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDExMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxNDYwLjQ0LDUyMy44OTEgYyAwLDQuMTcyIC0zLjQ2LDcuMDQ3IC02LjkxLDcuMDQ3IC00LjE1LDAgLTcuMDMsLTMuNDU0IC03LjAzLC02Ljg5MSAwLC00LjE3MiAzLjQ1LC03LjA0NyA2Ljg5LC03LjA0NyA0LjE3LDAgNy4wNSwzLjQ1MyA3LjA1LDYuODkxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTEyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE1MjMuNDQsNTIzLjg5MSBjIDAsNC4xNzIgLTMuNDYsNy4wNDcgLTYuOTEsNy4wNDcgLTQuMTUsMCAtNy4wMywtMy40NTQgLTcuMDMsLTYuODkxIDAsLTQuMTcyIDMuNDUsLTcuMDQ3IDYuODksLTcuMDQ3IDQuMTcsMCA3LjA1LDMuNDUzIDcuMDUsNi44OTEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTQiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTYyNC4zMSw1NTAuMTg4IDM5LjY2LDAgYyAyLjAxLDAgNC41OSwwIDQuNTksMi41NzggMCwyLjczNCAtMi40MywyLjczNCAtNC41OSwyLjczNCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3OCAwLC0yLjczNCAyLjQ1LC0yLjczNCA0LjYxLC0yLjczNCBsIDM5LjY0LDAgMCwtMzkuNjU3IGMgMCwtMiAwLC00LjU5MyAyLjU5LC00LjU5MyAyLjcyLDAgMi43MiwyLjQzNyAyLjcyLDQuNTkzIGwgMCwzOS42NTciIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTc1MS4yMyw1MzQuMDk0IGMgLTAuNzEsLTIuNDM4IC0wLjcxLC0yLjczNSAtMi43MSwtNS40NTMgLTMuMTgsLTQuMDMyIC05LjQ5LC0xMC4yMDMgLTE2LjI0LC0xMC4yMDMgLTUuODksMCAtOS4yLDUuMzEyIC05LjIsMTMuNzk2IDAsNy44OTEgNC40NSwyMy45ODUgNy4xOSwzMC4wMTYgNC44OSwxMC4wNjMgMTEuNjQsMTUuMjM0IDE3LjIzLDE1LjIzNCA5LjQ4LDAgMTEuMzYsLTExLjc4MSAxMS4zNiwtMTIuOTM3IDAsLTAuMTQxIC0wLjQ0LC0yIC0wLjU4LC0yLjI5NyBsIC03LjA1LC0yOC4xNTYgeiBtIDkuMjEsMzYuNzgxIGMgLTEuNTgsMy43MzQgLTUuNDcsOS40ODQgLTEyLjk0LDkuNDg0IC0xNi4yMywwIC0zMy43NSwtMjAuOTg0IC0zMy43NSwtNDIuMjM0IDAsLTE0LjIzNCA4LjMzLC0yMi41NjIgMTguMDksLTIyLjU2MiA3LjkxLDAgMTQuNjYsNi4xNzEgMTguNjgsMTAuOTIxIDEuNDMsLTguNDg0IDguMTgsLTEwLjkyMSAxMi41LC0xMC45MjEgNC4zMSwwIDcuNzYsMi41OTMgMTAuMzQsNy43NjUgMi4zLDQuODc1IDQuMzEsMTMuNjQxIDQuMzEsMTQuMjE5IDAsMC43MTkgLTAuNTgsMS4yODEgLTEuNDQsMS4yODEgLTEuMjksMCAtMS40MywtMC43MDMgLTIuMDEsLTIuODU5IC0yLjE0LC04LjQ4NSAtNC44OCwtMTcuNTMxIC0xMC43NywtMTcuNTMxIC00LjE3LDAgLTQuNDUsMy43MzQgLTQuNDUsNi42MDkgMCwzLjI5NyAwLjQyLDQuODc1IDEuNzIsMTAuNDg0IDEuMDEsMy41OTQgMS43Myw2Ljc1IDIuODcsMTAuOTIyIDUuMzIsMjEuNTQ3IDYuNjEsMjYuNzE5IDYuNjEsMjcuNTc4IDAsMi4wMTYgLTEuNTcsMy41OTQgLTMuNzMsMy41OTQgLTQuNTksMCAtNS43NSwtNS4wMzEgLTYuMDMsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMTgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTc5NC42MSw1MDMuNjU2IDEwLjUzLDEwLjIxOSBjIDE1LjUsMTMuNzE5IDIxLjQ3LDE5LjA3OCAyMS40NywyOS4wMTYgMCwxMS4zMjggLTguOTUsMTkuMjY1IC0yMS4wNiwxOS4yNjUgLTExLjI0LDAgLTE4LjU4LC05LjE0IC0xOC41OCwtMTcuOTg0IDAsLTUuNTYzIDQuOTcsLTUuNTYzIDUuMjYsLTUuNTYzIDEuNjksMCA1LjE2LDEuMjA0IDUuMTYsNS4yNjYgMCwyLjU5NCAtMS43OCw1LjE3MiAtNS4yNiw1LjE3MiAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDk0IDIuMjksNi40NTMgNy42NCwxMC4xMjUgMTMuNDEsMTAuMTI1IDkuMDUsMCAxMy4zMSwtOC4wNDcgMTMuMzEsLTE2LjE4NyAwLC03Ljk1MyAtNC45NywtMTUuNzk3IC0xMC40MywtMjEuOTUzIGwgLTE5LjA3LC0yMS4yNjYgYyAtMS4wOSwtMS4wOTQgLTEuMDksLTEuMjgxIC0xLjA5LC0zLjY3MiBsIDM2Ljg2LDAgMi43OCwxNy4yODEgLTIuNDgsMCBjIC0wLjUsLTIuOTg0IC0xLjIxLC03LjM0MyAtMi4xOSwtOC44NDMgLTAuNzEsLTAuNzgyIC03LjI1LC0wLjc4MiAtOS40NCwtMC43ODIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyMCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxODQwLjczLDUwMS44NTkgYyAtMC4yOSwtMS40ODQgLTAuODksLTMuNzY1IC0wLjg5LC00LjI2NSAwLC0xLjc5NyAxLjM5LC0yLjY4OCAyLjg5LC0yLjY4OCAxLjE5LDAgMi45NywwLjc5NyAzLjY4LDIuNzgyIDAuMDksMC4yMDMgMS4yOCw0Ljg3NSAxLjg5LDcuMzU5IGwgMi4xOCw4LjkzNyBjIDAuNiwyLjE4OCAxLjE5LDQuMzYgMS42OSw2LjY1NyAwLjM5LDEuNjg3IDEuMTksNC41NjIgMS4yOCw0Ljk2OCAxLjUsMy4wNzkgNi43NywxMi4xMSAxNi4yMSwxMi4xMSA0LjQ3LDAgNS4zNiwtMy42NzIgNS4zNiwtNi45NTMgMCwtNi4xNTcgLTQuODgsLTE4Ljg3NSAtNi40NiwtMjMuMTQxIC0wLjksLTIuMjgxIC0xLC0zLjQ4NCAtMSwtNC41NzggMCwtNC42NTYgMy40OSwtOC4xNDEgOC4xNCwtOC4xNDEgOS4zNSwwIDEzLjAyLDE0LjUgMTMuMDIsMTUuMjk3IDAsMSAtMC44OSwxIC0xLjE5LDEgLTEsMCAtMSwtMC4yOTcgLTEuNDgsLTEuNzk3IC0yLC02Ljc1IC01LjI3LC0xMi4zMTIgLTEwLjE0LC0xMi4zMTIgLTEuNjksMCAtMi4zOSwxIC0yLjM5LDMuMjgxIDAsMi40ODQgMC45LDQuODU5IDEuNzksNy4wNDcgMS44OSw1LjI2NiA2LjA3LDE2LjE4NyA2LjA3LDIxLjg1OSAwLDYuNjU3IC00LjI5LDEwLjYyNSAtMTEuNDMsMTAuNjI1IC04Ljk1LDAgLTEzLjgxLC02LjM1OSAtMTUuNSwtOC42NCAtMC41LDUuNTYyIC00LjU3LDguNjQgLTkuMTQsOC42NCAtNC41OCwwIC02LjQ1LC0zLjg3NSAtNy40NSwtNS42NTYgLTEuNTksLTMuMzc1IC0yLjk4LC05LjI1IC0yLjk4LC05LjY0MSAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMTEgMS42OSwyLjI5NyAxLjY4LDcuMDQ3IDMuNjcsMTEuODEzIDcuMjUsMTEuODEzIDEuOTgsMCAzLjA3LC0xLjI4MSAzLjA3LC00LjU2MyAwLC0yLjA5MyAtMC4yOSwtMy4xODcgLTEuNTksLTguMzQzIGwgLTUuNzcsLTIyLjk1NCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyMiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTY3Ljg2LDYwMi43NjYgYyAtMS43MywtMS41NzggLTcuMDUsLTYuNjEgLTcuMDUsLTguNjI1IDAsLTEuNDM4IDEuMywtMi43MTkgMi43NCwtMi43MTkgMS4yOSwwIDEuODcsMC44NTkgMi44NywyLjI5NyAzLjQ2LDQuMjk3IDcuMzMsNy4wMzEgMTAuNjMsOC45MDYgMS40MywwLjg1OSAyLjQ1LDEuMjgxIDIuNDUsMi44NzUgMCwxLjI4MSAtMS4xNiwyIC0yLjAyLDIuNzE5IC00LjAzLDIuNzM0IC01LjAzLDYuNjA5IC01LjQ2LDguMzI4IC0wLjQzLDEuMTU2IC0wLjg2LDIuODc1IC0yLjg2LDIuODc1IC0wLjg4LDAgLTIuNiwtMC41NjMgLTIuNiwtMi43MTkgMCwtMS4yOTcgMC44NiwtNC43NSAzLjYsLTguNjI1IGwgLTQ4LjI3LDAgYyAtMi40NSwwIC00Ljg5LDAgLTQuODksLTIuNzM0IDAsLTIuNTc4IDIuNTksLTIuNTc4IDQuODksLTIuNTc4IGwgNDUuOTcsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEyNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTYyLjY2LDU3MC43MzQgYyAwLDkuMDQ3IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzIC02LjYxLC02LjMyOCAwLC0xLjcxOCAxLC0yLjczNCAxLjU4LC0zLjI5NyAxLjQzLC0xLjI5NiA1LjE3LC01LjE3MSA1LjE3LC0xMi42NTYgMCwtNi4wMzEgLTguNjMsLTM5LjY0IC0yNS44NiwtMzkuNjQgLTguNzcsMCAtMTAuNDksNy4zMjggLTEwLjQ5LDEyLjY0IDAsNy4xODggMy4zLDE3LjIzNSA3LjE5LDI3LjU3OCAyLjMsNS44OTEgMi44OCw3LjMyOCAyLjg4LDEwLjIwMyAwLDYuMDMyIC00LjMyLDExLjUgLTExLjM2LDExLjUgLTEzLjIyLDAgLTE4LjUzLC0yMC44NDMgLTE4LjUzLC0yMS45ODQgMCwtMC41NzggMC41NywtMS4yOTcgMS41NywtMS4yOTcgMS4zLDAgMS40NCwwLjU3OCAyLjAyLDIuNTk0IDMuNDUsMTIuMzQ0IDkuMDUsMTcuODEyIDE0LjUxLDE3LjgxMiAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQgLTEuNTgsLTcuODkgLTMuNzQsLTEzLjM1OSAtNi45LC0xOC4zOTEgLTYuOSwtMjIuODQ0IC02LjksLTI2LjI4MSAwLC0zLjE3MiAwLjQ0LC05LjA0NyA0Ljg5LC0xMy4wNzggNS4xNywtNC40NTMgMTIuMzYsLTQuNDUzIDEzLjY0LC00LjQ1MyAyMy44NiwwIDMyLjA1LDQ2Ljk4NCAzMi4wNSw1NS4xNzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTk3My43Myw1MDEuODU5IGMgLTAuMjksLTEuNDg0IC0wLjg5LC0zLjc2NSAtMC44OSwtNC4yNjUgMCwtMS43OTcgMS4zOSwtMi42ODggMi44OSwtMi42ODggMS4xOSwwIDIuOTcsMC43OTcgMy42OCwyLjc4MiAwLjA5LDAuMjAzIDEuMjgsNC44NzUgMS44OSw3LjM1OSBsIDIuMTgsOC45MzcgYyAwLjYsMi4xODggMS4xOSw0LjM2IDEuNjksNi42NTcgMC4zOSwxLjY4NyAxLjE5LDQuNTYyIDEuMjgsNC45NjggMS41LDMuMDc5IDYuNzcsMTIuMTEgMTYuMjEsMTIuMTEgNC40NywwIDUuMzYsLTMuNjcyIDUuMzYsLTYuOTUzIDAsLTYuMTU3IC00Ljg4LC0xOC44NzUgLTYuNDYsLTIzLjE0MSAtMC45LC0yLjI4MSAtMSwtMy40ODQgLTEsLTQuNTc4IDAsLTQuNjU2IDMuNDksLTguMTQxIDguMTQsLTguMTQxIDkuMzUsMCAxMy4wMiwxNC41IDEzLjAyLDE1LjI5NyAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEsLTAuMjk3IC0xLjQ4LC0xLjc5NyAtMiwtNi43NSAtNS4yNywtMTIuMzEyIC0xMC4xNCwtMTIuMzEyIC0xLjY5LDAgLTIuMzksMSAtMi4zOSwzLjI4MSAwLDIuNDg0IDAuOSw0Ljg1OSAxLjc5LDcuMDQ3IDEuODksNS4yNjYgNi4wNywxNi4xODcgNi4wNywyMS44NTkgMCw2LjY1NyAtNC4yOSwxMC42MjUgLTExLjQzLDEwLjYyNSAtOC45NSwwIC0xMy44MSwtNi4zNTkgLTE1LjUsLTguNjQgLTAuNSw1LjU2MiAtNC41Nyw4LjY0IC05LjE0LDguNjQgLTQuNTgsMCAtNi40NSwtMy44NzUgLTcuNDUsLTUuNjU2IC0xLjU5LC0zLjM3NSAtMi45OCwtOS4yNSAtMi45OCwtOS42NDEgMCwtMSAxLC0xIDEuMiwtMSAwLjk4LDAgMS4wOSwwLjExIDEuNjksMi4yOTcgMS42OCw3LjA0NyAzLjY3LDExLjgxMyA3LjI1LDExLjgxMyAxLjk4LDAgMy4wNywtMS4yODEgMy4wNywtNC41NjMgMCwtMi4wOTMgLTAuMjksLTMuMTg3IC0xLjU5LC04LjM0MyBsIC01Ljc3LC0yMi45NTQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA1NS40NCw1NzIuMDE2IGMgMCwzLjg5IC0zLjMxLDYuOTA2IC02LjkxLDYuOTA2IC00LjE1LDAgLTcuMDMsLTMuMzEzIC03LjAzLC02LjkwNiAwLC00LjMxMyAzLjU5LC03LjAzMiA2Ljg5LC03LjAzMiAzLjg4LDAgNy4wNSwzLjAxNiA3LjA1LDcuMDMyIHogbSAtMi40NiwtNTMuNTc4IGMgMCwtNS4wMzIgMCwtMTUuMjM1IC04Ljc1LC0yNiAtMC44NywtMS4xNTcgLTAuODcsLTEuNDM4IC0wLjg3LC0xLjczNSAwLC0wLjcwMyAwLjcyLC0xLjQyMiAxLjQ0LC0xLjQyMiAxLjAxLDAgMTEuMDYsMTAuNjI1IDExLjA2LDI3LjQzOCAwLDUuMzEyIC0wLjQyLDE0LjIxOSAtNy40NywxNC4yMTkgLTQuMTYsMCAtNi44OSwtMy4xNTcgLTYuODksLTYuODkxIDAsLTMuODkxIDIuNzMsLTcuMDQ3IDcuMDMsLTcuMDQ3IDIuNzQsMCAzLjc0LDAuODU5IDQuNDUsMS40MzgiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Ik0gODUuODEyNSwzNDkuNzgxIEMgODIuNjU2MywzNDkuMjAzIDgwLjUsMzQ2LjQ4NCA4MC41LDM0My42MDkgYyAwLC0zLjMxMiAyLjczNDQsLTYuNDY4IDYuMzEyNSwtNi40NjggMy41OTM4LDAgNi40Njg4LDIuODc1IDYuNDY4OCw2LjMyOCAwLDMuMjk3IC0yLjczNDQsNi40NTMgLTYuMzEyNSw2LjQ1MyAtMC40Mzc1LDAgLTAuNzE4OCwwIC0xLjE1NjMsLTAuMTQxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTMyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJNIDg1LjgxMjUsMzA5Ljc4MSBDIDgyLjY1NjMsMzA5LjIwMyA4MC41LDMwNi40ODQgODAuNSwzMDMuNjA5IGMgMCwtMy4zMTIgMi43MzQ0LC02LjQ2OCA2LjMxMjUsLTYuNDY4IDMuNTkzOCwwIDYuNDY4OCwyLjg3NSA2LjQ2ODgsNi4zMjggMCwzLjI5NyAtMi43MzQ0LDYuNDUzIC02LjMxMjUsNi40NTMgLTAuNDM3NSwwIC0wLjcxODgsMCAtMS4xNTYzLC0wLjE0MSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzNCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0iTSA4NS44MTI1LDI2OS43ODEgQyA4Mi42NTYzLDI2OS4yMDMgODAuNSwyNjYuNDg0IDgwLjUsMjYzLjYwOSBjIDAsLTMuMzEyIDIuNzM0NCwtNi40NjggNi4zMTI1LC02LjQ2OCAzLjU5MzgsMCA2LjQ2ODgsMi44NzUgNi40Njg4LDYuMzI4IDAsMy4yOTcgLTIuNzM0NCw2LjQ1MyAtNi4zMTI1LDYuNDUzIC0wLjQzNzUsMCAtMC43MTg4LDAgLTEuMTU2MywtMC4xNDEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxMzYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzQuODU5NCwxMTcuNzY2IGMgLTEuNzM0NCwtMS41NzggLTcuMDQ2OSwtNi42MSAtNy4wNDY5LC04LjYyNSAwLC0xLjQzOCAxLjI5NjksLTIuNzE5IDIuNzM0NCwtMi43MTkgMS4yOTY5LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMxLDQuMjk3IDcuMzI4MSw3LjAzMSAxMC42MjUsOC45MDYgMS40Mzc1LDAuODU5IDIuNDUzMSwxLjI4MSAyLjQ1MzEsMi44NzUgMCwxLjI4MSAtMS4xNTYyLDIgLTIuMDE1NiwyLjcxOSAtNC4wMzEzLDIuNzM0IC01LjAzMTMsNi42MDkgLTUuNDY4OCw4LjMyOCAtMC40MjE4LDEuMTU2IC0wLjg1OTMsMi44NzUgLTIuODU5MywyLjg3NSAtMC44NzUsMCAtMi41OTM4LC0wLjU2MyAtMi41OTM4LC0yLjcxOSAwLC0xLjI5NyAwLjg1OTQsLTQuNzUgMy41OTM4LC04LjYyNSBsIC00OC4yNjU3LDAgYyAtMi40NTMxLDAgLTQuODkwNiwwIC00Ljg5MDYsLTIuNzM0IDAsLTIuNTc4IDIuNTkzOCwtMi41NzggNC44OTA2LC0yLjU3OCBsIDQ1Ljk2ODgsMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDEzOCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA0OS45ODQ0LDQwLjMyODEgYyAxLjg3NSwtOC4wNDY4IDguNzY1NiwtOS43NjU2IDEyLjIxODcsLTkuNzY1NiA0LjU5MzgsMCA4LjA0NjksMy4wMTU2IDEwLjM0MzgsNy45MDYzIDIuNDM3NSw1LjE3MTggNC4yOTY5LDEzLjY0MDYgNC4yOTY5LDE0LjA3ODEgMCwwLjcxODcgLTAuNTYyNSwxLjI4MTIgLTEuNDIxOSwxLjI4MTIgLTEuMjk2OSwwIC0xLjQzNzUsLTAuNzAzMSAtMi4wMTU2LC0yLjg1OTMgLTIuNTkzOCwtOS45MjE5IC01LjE3MTksLTE3LjUzMTMgLTEwLjkyMTksLTE3LjUzMTMgLTQuMzEyNSwwIC00LjMxMjUsNC43MzQ0IC00LjMxMjUsNi42MDk0IDAsMy4yOTY5IDAuNDM3NSw0LjczNDQgMS44NzUsMTAuNzY1NiAxLDMuODkwNiAyLDcuNzY1NiAyLjg3NSwxMS43ODEzIGwgNS44OTA2LDIzLjQyMTggYyAxLDMuNTkzOCAxLDMuODc1IDEsNC4zMTI1IDAsMi4xNTYzIC0xLjcxODcsMy41OTM4IC0zLjg3NSwzLjU5MzggLTQuMTcxOSwwIC01LjE3MTksLTMuNTkzOCAtNi4wMzEyLC03LjE4NzUgQyA1OC40Njg4LDgxLjEyNSA1MC43MDMxLDUwLjI1IDQ5LjcwMzEsNDUuMjE4OCBjIC0wLjE0MDYsMCAtNS43NSwtMTEuNzgxMyAtMTYuMjM0MywtMTEuNzgxMyAtNy40Njg4LDAgLTguOTA2Myw2LjQ2ODggLTguOTA2MywxMS43ODEzIDAsOC4xODc1IDQuMDE1NiwxOS42NzE4IDcuNzUsMjkuMjk2OCAxLjczNDQsNC42MDk0IDIuNDUzMSw2LjQ2ODggMi40NTMxLDkuMzQzOCAwLDYuMTcxOSAtNC40NTMxLDExLjUgLTExLjM1OTMsMTEuNSAtMTMuMjE4OCwwIC0xOC41MzEzLC0yMC44NDM4IC0xOC41MzEzLC0yMS45ODQ0IDAsLTAuNTc4MSAwLjU3ODEzLC0xLjI5NjkgMS41NzgxMywtMS4yOTY5IDEuMjk2ODcsMCAxLjQzNzUsMC41NzgyIDIuMDE1NjIsMi41OTM4IDMuNDUzMTUsMTIuMzQzNyA5LjA0Njg1LDE3LjgxMjUgMTQuNTE1NjUsMTcuODEyNSAxLjQzNzUsMCAzLjczNDQsLTAuMTU2MyAzLjczNDQsLTQuNzUgQyAyNi43MTg4LDg0IDI1LjE0MDYsNzkuODQzOCAyMi45ODQ0LDc0LjM3NSAxNi42NTYzLDU3LjI4MTMgMTUuOTM3NSw1MS44MjgxIDE1LjkzNzUsNDcuNTE1NiAxNS45Mzc1LDMyLjg1OTQgMjcsMzAuNTYyNSAzMi44OTA2LDMwLjU2MjUgYyA5LjE4NzUsMCAxNC4yMTg4LDYuMzI4MSAxNy4wOTM4LDkuNzY1NiIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE0MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSA4OS43MzQ0LDE1Ljg1OTQgYyAtMC4yOTY5LC0xLjQ4NDQgLTAuODkwNiwtMy43NjU2IC0wLjg5MDYsLTQuMjY1NiAwLC0xLjc5NjkyIDEuMzkwNiwtMi42ODc1NSAyLjg5MDYsLTIuNjg3NTUgMS4xODc1LDAgMi45Njg3LDAuNzk2ODggMy42NzE5LDIuNzgxMjUgMC4wOTM3LDAuMjAzMSAxLjI4MTIsNC44NzUgMS44OTA2LDcuMzU5NCBsIDIuMTg3NSw4LjkzNzUgYyAwLjU5MzYsMi4xODc1IDEuMTg3Niw0LjM1OTQgMS42ODc2LDYuNjU2MiAwLjM5MSwxLjY4NzUgMS4xODcsNC41NjI1IDEuMjgxLDQuOTY4OCAxLjUsMy4wNzgxIDYuNzY2LDEyLjEwOTQgMTYuMjAzLDEyLjEwOTQgNC40NjksMCA1LjM2LC0zLjY3MTkgNS4zNiwtNi45NTMyIDAsLTIuNDg0MyAtMC43MDMsLTUuMjY1NiAtMS41LC04LjI1IEwgMTE5LjczNCwyNSAxMTcuNzUsMTcuNDUzMSBjIC0wLjM5MSwtMS45ODQzIC0xLjI4MSwtNS4zNTkzIC0xLjI4MSwtNS44NTkzIDAsLTEuNzk2OTIgMS4zOSwtMi42ODc1NSAyLjg3NSwtMi42ODc1NSAzLjA3OCwwIDMuNjcyLDIuNDg0MzUgNC40NjksNS42NTYyNSAxLjM5LDUuNTYyNSA1LjA2MiwyMC4wNzgxIDUuOTY4LDIzLjk1MzEgMC4yOTcsMS4yODEzIDUuNTYzLDEzLjIwMzIgMTYuMzkxLDEzLjIwMzIgNC4yNjYsMCA1LjM1OSwtMy4zNzUgNS4zNTksLTYuOTUzMiAwLC01LjY1NjIgLTQuMTcyLC0xNi45ODQzIC02LjE1NiwtMjIuMjUgLTAuOTA2LC0yLjM5MDYgLTEuMjk3LC0zLjQ2ODcgLTEuMjk3LC01LjQ2ODcgMCwtNC42NTYzIDMuNDg1LC04LjE0MDY1IDguMTQxLC04LjE0MDY1IDkuMzQ0LDAgMTMuMDE1LDE0LjUwMDA1IDEzLjAxNSwxNS4yOTY4NSAwLDEgLTAuODksMSAtMS4xODcsMSAtMSwwIC0xLC0wLjI5NjggLTEuNDg0LC0xLjc5NjggLTEuNSwtNS4yNjU3IC00LjY3MiwtMTIuMzEyNSAtMTAuMTQxLC0xMi4zMTI1IC0xLjY4OCwwIC0yLjM3NSwxIC0yLjM3NSwzLjI4MTIgMCwyLjQ4NDQgMC44OTEsNC44NTk0IDEuNzgxLDcuMDQ2OSAxLjg5MSw1LjE3MTkgNi4wNjMsMTYuMTg3NSA2LjA2MywyMS44NTk0IDAsNi40NTMxIC0zLjk4NSwxMC42MjUgLTExLjQyMiwxMC42MjUgLTcuNDUzLDAgLTEyLjUxNiwtNC4zNzUgLTE2LjIwMywtOS42NDA3IC0wLjA5NCwxLjI5NjkgLTAuMzkxLDQuNjcxOSAtMy4xNzIsNy4wNjI1IC0yLjQ4NSwyLjA3ODIgLTUuNjU2LDIuNTc4MiAtOC4xNDEsMi41NzgyIC04Ljk1MywwIC0xMy44MTIsLTYuMzU5NCAtMTUuNSwtOC42NDA3IC0wLjUsNS42NTYzIC00LjY3MTcsOC42NDA3IC05LjE0MDUsOC42NDA3IC00LjU3ODEsMCAtNi40NTMxLC0zLjg3NSAtNy4zNTk0LC01LjY1NjMgLTEuNzgxMiwtMy40ODQ0IC0zLjA3ODEsLTkuMzQzNyAtMy4wNzgxLC05LjY0MDYgMCwtMSAxLC0xIDEuMjAzMSwtMSAwLjk4NDQsMCAxLjA5MzgsMC4xMDk0IDEuNjg3NSwyLjI5NjkgMS42ODc1LDcuMDQ2OCAzLjY3MTksMTEuODEyNSA3LjI1LDExLjgxMjUgMS41OTM4LDAgMy4wNzgyLC0wLjc5NjkgMy4wNzgyLC00LjU2MjUgMCwtMi4wOTM4IC0wLjI5NjksLTMuMTg3NSAtMS41OTM4LC04LjM0MzggTCA4OS43MzQ0LDE1Ljg1OTQiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMzY5Ljk2OSw3OC41NDY5IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4MSAwLDIuNzM0NCAtMi40MzgsMi43MzQ0IC00LjU5NCwyLjczNDQgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41NzgxIDAsLTIuNzM0NCAyLjQ1MywtMi43MzQ0IDQuNjA5LC0yLjczNDQgbCA4NC42MSwwIHogbSAwLC0yNi43MTg4IGMgMi4wMTUsMCA0LjU5NCwwIDQuNTk0LDIuNTc4MiAwLDIuNzM0MyAtMi40MzgsMi43MzQzIC00LjU5NCwyLjczNDMgbCAtODQuNjEsMCBjIC0yLjAxNSwwIC00LjYwOSwwIC00LjYwOSwtMi41OTM3IDAsLTIuNzE4OCAyLjQ1MywtMi43MTg4IDQuNjA5LC0yLjcxODggbCA4NC42MSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTQ0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDQ2NS4yMzQsNDkuMDkzOCBjIC0wLjcxOCwtMi40Mzc1IC0wLjcxOCwtMi43MzQ0IC0yLjcxOCwtNS40NTMyIC0zLjE3MiwtNC4wMzEyIC05LjQ4NSwtMTAuMjAzMSAtMTYuMjM1LC0xMC4yMDMxIC01Ljg5LDAgLTkuMjAzLDUuMzEyNSAtOS4yMDMsMTMuNzk2OSAwLDcuODkwNiA0LjQ1MywyMy45ODQ0IDcuMTg4LDMwLjAxNTYgNC44OSwxMC4wNjI1IDExLjY0LDE1LjIzNDQgMTcuMjM0LDE1LjIzNDQgOS40ODQsMCAxMS4zNTksLTExLjc4MTMgMTEuMzU5LC0xMi45Mzc1IDAsLTAuMTQwNiAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NjkgbCAtNy4wNDcsLTI4LjE1NjIgeiBtIDkuMjA0LDM2Ljc4MTIgYyAtMS41NzksMy43MzQ0IC01LjQ2OSw5LjQ4NDQgLTEyLjkzOCw5LjQ4NDQgLTE2LjIzNCwwIC0zMy43NSwtMjAuOTg0NCAtMzMuNzUsLTQyLjIzNDQgMCwtMTQuMjM0NCA4LjMyOCwtMjIuNTYyNSAxOC4wOTQsLTIyLjU2MjUgNy45MDYsMCAxNC42NTYsNi4xNzE5IDE4LjY3MiwxMC45MjE5IDEuNDM3LC04LjQ4NDQgOC4xODcsLTEwLjkyMTkgMTIuNSwtMTAuOTIxOSA0LjMxMiwwIDcuNzY1LDIuNTkzOCAxMC4zNDMsNy43NjU2IDIuMjk3LDQuODc1IDQuMzEzLDEzLjY0MDcgNC4zMTMsMTQuMjE4OCAwLDAuNzE4NyAtMC41NzgsMS4yODEyIC0xLjQzOCwxLjI4MTIgLTEuMjk2LDAgLTEuNDM3LC0wLjcwMzEgLTIuMDE1LC0yLjg1OTMgLTIuMTQxLC04LjQ4NDQgLTQuODc1LC0xNy41MzEzIC0xMC43NjYsLTE3LjUzMTMgLTQuMTcyLDAgLTQuNDUzLDMuNzM0NCAtNC40NTMsNi42MDk0IDAsMy4yOTY5IDAuNDIyLDQuODc1IDEuNzE5LDEwLjQ4NDQgMS4wMTUsMy41OTM3IDEuNzM0LDYuNzUgMi44NzUsMTAuOTIxOCA1LjMxMiwyMS41NDY5IDYuNjA5LDI2LjcxODggNi42MDksMjcuNTc4MiAwLDIuMDE1NiAtMS41NzgsMy41OTM3IC0zLjczNCwzLjU5MzcgLTQuNTk0LDAgLTUuNzUsLTUuMDMxMiAtNi4wMzEsLTYuNzUiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDYiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNTAzLjczNCwxNS44NTk0IGMgLTAuMjk2LC0xLjQ4NDQgLTAuODksLTMuNzY1NiAtMC44OSwtNC4yNjU2IDAsLTEuNzk2OTIgMS4zOSwtMi42ODc1NSAyLjg5LC0yLjY4NzU1IDEuMTg4LDAgMi45NjksMC43OTY4OCAzLjY3MiwyLjc4MTI1IDAuMDk0LDAuMjAzMSAxLjI4Miw0Ljg3NSAxLjg5MSw3LjM1OTQgbCAyLjE4Nyw4LjkzNzUgYyAwLjU5NCwyLjE4NzUgMS4xODgsNC4zNTk0IDEuNjg4LDYuNjU2MiAwLjM5MSwxLjY4NzUgMS4xODcsNC41NjI1IDEuMjgxLDQuOTY4OCAxLjUsMy4wNzgxIDYuNzY2LDEyLjEwOTQgMTYuMjAzLDEyLjEwOTQgNC40NjksMCA1LjM2LC0zLjY3MTkgNS4zNiwtNi45NTMyIDAsLTIuNDg0MyAtMC43MDMsLTUuMjY1NiAtMS41LC04LjI1IEwgNTMzLjczNCwyNSA1MzEuNzUsMTcuNDUzMSBjIC0wLjM5MSwtMS45ODQzIC0xLjI4MSwtNS4zNTkzIC0xLjI4MSwtNS44NTkzIDAsLTEuNzk2OTIgMS4zOSwtMi42ODc1NSAyLjg3NSwtMi42ODc1NSAzLjA3OCwwIDMuNjcyLDIuNDg0MzUgNC40NjksNS42NTYyNSAxLjM5LDUuNTYyNSA1LjA2MiwyMC4wNzgxIDUuOTY4LDIzLjk1MzEgMC4yOTcsMS4yODEzIDUuNTYzLDEzLjIwMzIgMTYuMzkxLDEzLjIwMzIgNC4yNjYsMCA1LjM1OSwtMy4zNzUgNS4zNTksLTYuOTUzMiAwLC01LjY1NjIgLTQuMTcyLC0xNi45ODQzIC02LjE1NiwtMjIuMjUgLTAuOTA2LC0yLjM5MDYgLTEuMjk3LC0zLjQ2ODcgLTEuMjk3LC01LjQ2ODcgMCwtNC42NTYzIDMuNDg1LC04LjE0MDY1IDguMTQxLC04LjE0MDY1IDkuMzQ0LDAgMTMuMDE1LDE0LjUwMDA1IDEzLjAxNSwxNS4yOTY4NSAwLDEgLTAuODksMSAtMS4xODcsMSAtMSwwIC0xLC0wLjI5NjggLTEuNDg0LC0xLjc5NjggLTEuNSwtNS4yNjU3IC00LjY3MiwtMTIuMzEyNSAtMTAuMTQxLC0xMi4zMTI1IC0xLjY4OCwwIC0yLjM3NSwxIC0yLjM3NSwzLjI4MTIgMCwyLjQ4NDQgMC44OTEsNC44NTk0IDEuNzgxLDcuMDQ2OSAxLjg5MSw1LjE3MTkgNi4wNjMsMTYuMTg3NSA2LjA2MywyMS44NTk0IDAsNi40NTMxIC0zLjk4NSwxMC42MjUgLTExLjQyMiwxMC42MjUgLTcuNDUzLDAgLTEyLjUxNiwtNC4zNzUgLTE2LjIwMywtOS42NDA3IC0wLjA5NCwxLjI5NjkgLTAuMzkxLDQuNjcxOSAtMy4xNzIsNy4wNjI1IC0yLjQ4NSwyLjA3ODIgLTUuNjU2LDIuNTc4MiAtOC4xNDEsMi41NzgyIC04Ljk1MywwIC0xMy44MTIsLTYuMzU5NCAtMTUuNSwtOC42NDA3IC0wLjUsNS42NTYzIC00LjY3Miw4LjY0MDcgLTkuMTQsOC42NDA3IC00LjU3OSwwIC02LjQ1NCwtMy44NzUgLTcuMzYsLTUuNjU2MyAtMS43ODEsLTMuNDg0NCAtMy4wNzgsLTkuMzQzNyAtMy4wNzgsLTkuNjQwNiAwLC0xIDEsLTEgMS4yMDMsLTEgMC45ODUsMCAxLjA5NCwwLjEwOTQgMS42ODgsMi4yOTY5IDEuNjg3LDcuMDQ2OCAzLjY3MiwxMS44MTI1IDcuMjUsMTEuODEyNSAxLjU5MywwIDMuMDc4LC0wLjc5NjkgMy4wNzgsLTQuNTYyNSAwLC0yLjA5MzggLTAuMjk3LC0zLjE4NzUgLTEuNTk0LC04LjM0MzggbCAtNS43NjYsLTIyLjk1MzEiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNDgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNjEyLjIwMyw3My41NzgxIGMgMCwyLjM3NSAwLDIuNTc4MiAtMi4yODEsMi41NzgyIC02LjE1NiwtNi4zNTk0IC0xNC45MDYsLTYuMzU5NCAtMTguMDc4LC02LjM1OTQgbCAwLC0zLjA3ODEgYyAxLjk4NCwwIDcuODQ0LDAgMTMuMDE1LDIuNTc4MSBsIDAsLTUxLjQ1MzEgYyAwLC0zLjU3ODIgLTAuMjk2LC00Ljc2NTcgLTkuMjUsLTQuNzY1NyBsIC0zLjE3MSwwIDAsLTMuMDc4MSBjIDMuNDY4LDAuMjk2OSAxMi4xMjUsMC4yOTY5IDE2LjA5MywwLjI5NjkgMy45NjksMCAxMi42MSwwIDE2LjA5NCwtMC4yOTY5IGwgMCwzLjA3ODEgLTMuMTg3LDAgYyAtOC45MzgsMCAtOS4yMzUsMS4wOTM4IC05LjIzNSw0Ljc2NTcgbCAwLDU1LjczNDMiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNTAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzA4Ljg1OSwxMTcuNzY2IGMgLTEuNzM0LC0xLjU3OCAtNy4wNDYsLTYuNjEgLTcuMDQ2LC04LjYyNSAwLC0xLjQzOCAxLjI5NiwtMi43MTkgMi43MzQsLTIuNzE5IDEuMjk3LDAgMS44NzUsMC44NTkgMi44NzUsMi4yOTcgMy40NTMsNC4yOTcgNy4zMjgsNy4wMzEgMTAuNjI1LDguOTA2IDEuNDM3LDAuODU5IDIuNDUzLDEuMjgxIDIuNDUzLDIuODc1IDAsMS4yODEgLTEuMTU2LDIgLTIuMDE2LDIuNzE5IC00LjAzMSwyLjczNCAtNS4wMzEsNi42MDkgLTUuNDY4LDguMzI4IC0wLjQyMiwxLjE1NiAtMC44NiwyLjg3NSAtMi44NiwyLjg3NSAtMC44NzUsMCAtMi41OTMsLTAuNTYzIC0yLjU5MywtMi43MTkgMCwtMS4yOTcgMC44NTksLTQuNzUgMy41OTMsLTguNjI1IGwgLTQ4LjI2NSwwIGMgLTIuNDUzLDAgLTQuODkxLDAgLTQuODkxLC0yLjczNCAwLC0yLjU3OCAyLjU5NCwtMi41NzggNC44OTEsLTIuNTc4IGwgNDUuOTY4LDAiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNTIiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gNzAzLjY1Niw4NS43MzQ0IGMgMCw5LjA0NjkgLTQuNjA5LDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ1MywwIC02LjYwOSwtMy40NTMxIC02LjYwOSwtNi4zMjgxIDAsLTEuNzE4OCAxLC0yLjczNDQgMS41NzgsLTMuMjk2OSAxLjQzOCwtMS4yOTY5IDUuMTcyLC01LjE3MTkgNS4xNzIsLTEyLjY1NjMgMCwtNi4wMzEyIC04LjYyNSwtMzkuNjQwNiAtMjUuODU5LC0zOS42NDA2IC04Ljc2NiwwIC0xMC40ODUsNy4zMjgxIC0xMC40ODUsMTIuNjQwNiAwLDcuMTg3NSAzLjI5NywxNy4yMzQ0IDcuMTg4LDI3LjU3ODIgMi4yOTcsNS44OTA2IDIuODc1LDcuMzI4MSAyLjg3NSwxMC4yMDMxIDAsNi4wMzEyIC00LjMxMywxMS41IC0xMS4zNiwxMS41IC0xMy4yMTgsMCAtMTguNTMxLC0yMC44NDM4IC0xOC41MzEsLTIxLjk4NDQgMCwtMC41NzgxIDAuNTc4LC0xLjI5NjkgMS41NzgsLTEuMjk2OSAxLjI5NywwIDEuNDM4LDAuNTc4MiAyLjAxNiwyLjU5MzggMy40NTMsMTIuMzQzNyA5LjA0NywxNy44MTI1IDE0LjUxNSwxNy44MTI1IDEuMjgyLDAgMy43MzUsMCAzLjczNSwtNC43NSAwLC0zLjczNDQgLTEuNTc4LC03Ljg5MDYgLTMuNzM1LC0xMy4zNTk0IC02LjkwNiwtMTguMzkwNiAtNi45MDYsLTIyLjg0MzcgLTYuOTA2LC0yNi4yODEyIDAsLTMuMTcxOSAwLjQzOCwtOS4wNDY5IDQuODkxLC0xMy4wNzgyIDUuMTcyLC00LjQ1MzEgMTIuMzU5LC00LjQ1MzEgMTMuNjQsLTQuNDUzMSAyMy44NiwwIDMyLjA0Nyw0Ni45ODQ0IDMyLjA0Nyw1NS4xNzE5IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDczNS4yMDMsNzMuNTc4MSBjIDAsMi4zNzUgMCwyLjU3ODIgLTIuMjgxLDIuNTc4MiAtNi4xNTYsLTYuMzU5NCAtMTQuOTA2LC02LjM1OTQgLTE4LjA3OCwtNi4zNTk0IGwgMCwtMy4wNzgxIGMgMS45ODQsMCA3Ljg0NCwwIDEzLjAxNSwyLjU3ODEgbCAwLC01MS40NTMxIGMgMCwtMy41NzgyIC0wLjI5NiwtNC43NjU3IC05LjI1LC00Ljc2NTcgbCAtMy4xNzEsMCAwLC0zLjA3ODEgYyAzLjQ2OCwwLjI5NjkgMTIuMTI1LDAuMjk2OSAxNi4wOTMsMC4yOTY5IDMuOTY5LDAgMTIuNjEsMCAxNi4wOTQsLTAuMjk2OSBsIDAsMy4wNzgxIC0zLjE4NywwIGMgLTguOTM4LDAgLTkuMjM1LDEuMDkzOCAtOS4yMzUsNC43NjU3IGwgMCw1NS43MzQzIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDg1MC4zMTMsNjUuMTg3NSAzOS42NTYsMCBjIDIuMDE1LDAgNC41OTQsMCA0LjU5NCwyLjU3ODEgMCwyLjczNDQgLTIuNDM4LDIuNzM0NCAtNC41OTQsMi43MzQ0IGwgLTM5LjY1NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTc5LDQuNTk0IC0yLjczNCwwIC0yLjczNCwtMi40NTMgLTIuNzM0LC00LjU5NCBsIDAsLTM5LjY1NiAtMzkuNjQxLDAgYyAtMi4wMTUsMCAtNC42MDksMCAtNC42MDksLTIuNTc4MSAwLC0yLjczNDQgMi40NTMsLTIuNzM0NCA0LjYwOSwtMi43MzQ0IGwgMzkuNjQxLDAgMCwtMzkuNjU2MiBjIDAsLTIgMCwtNC41OTM4IDIuNTk0LC00LjU5MzggMi43MTksMCAyLjcxOSwyLjQzNzUgMi43MTksNC41OTM4IGwgMCwzOS42NTYyIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTU4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDk3Ny4yMzQsNDkuMDkzOCBjIC0wLjcxOCwtMi40Mzc1IC0wLjcxOCwtMi43MzQ0IC0yLjcxOCwtNS40NTMyIC0zLjE3MiwtNC4wMzEyIC05LjQ4NSwtMTAuMjAzMSAtMTYuMjM1LC0xMC4yMDMxIC01Ljg5LDAgLTkuMjAzLDUuMzEyNSAtOS4yMDMsMTMuNzk2OSAwLDcuODkwNiA0LjQ1MywyMy45ODQ0IDcuMTg4LDMwLjAxNTYgNC44OSwxMC4wNjI1IDExLjY0LDE1LjIzNDQgMTcuMjM0LDE1LjIzNDQgOS40ODQsMCAxMS4zNTksLTExLjc4MTMgMTEuMzU5LC0xMi45Mzc1IDAsLTAuMTQwNiAtMC40MzcsLTIgLTAuNTc4LC0yLjI5NjkgbCAtNy4wNDcsLTI4LjE1NjIgeiBtIDkuMjA0LDM2Ljc4MTIgYyAtMS41NzksMy43MzQ0IC01LjQ2OSw5LjQ4NDQgLTEyLjkzOCw5LjQ4NDQgLTE2LjIzNCwwIC0zMy43NSwtMjAuOTg0NCAtMzMuNzUsLTQyLjIzNDQgMCwtMTQuMjM0NCA4LjMyOCwtMjIuNTYyNSAxOC4wOTQsLTIyLjU2MjUgNy45MDYsMCAxNC42NTYsNi4xNzE5IDE4LjY3MiwxMC45MjE5IDEuNDM3LC04LjQ4NDQgOC4xODcsLTEwLjkyMTkgMTIuNSwtMTAuOTIxOSA0LjMxMiwwIDcuNzY1LDIuNTkzOCAxMC4zNDMsNy43NjU2IDIuMzAxLDQuODc1IDQuMzExLDEzLjY0MDcgNC4zMTEsMTQuMjE4OCAwLDAuNzE4NyAtMC41OCwxLjI4MTIgLTEuNDQsMS4yODEyIC0xLjI5LDAgLTEuNDMsLTAuNzAzMSAtMi4wMSwtMi44NTkzIC0yLjE0MiwtOC40ODQ0IC00Ljg3NiwtMTcuNTMxMyAtMTAuNzY3LC0xNy41MzEzIC00LjE3MiwwIC00LjQ1MywzLjczNDQgLTQuNDUzLDYuNjA5NCAwLDMuMjk2OSAwLjQyMiw0Ljg3NSAxLjcxOSwxMC40ODQ0IDEuMDE1LDMuNTkzNyAxLjczNCw2Ljc1IDIuODc1LDEwLjkyMTggNS4zMTIsMjEuNTQ2OSA2LjYwOSwyNi43MTg4IDYuNjA5LDI3LjU3ODIgMCwyLjAxNTYgLTEuNTc4LDMuNTkzNyAtMy43MzQsMy41OTM3IC00LjU5NCwwIC01Ljc1LC01LjAzMTIgLTYuMDMxLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTYwIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEwMTYuNzMsMTUuODU5NCBjIC0wLjI5LC0xLjQ4NDQgLTAuODksLTMuNzY1NiAtMC44OSwtNC4yNjU2IDAsLTEuNzk2OTIgMS4zOSwtMi42ODc1NSAyLjg5LC0yLjY4NzU1IDEuMTksMCAyLjk3LDAuNzk2ODggMy42OCwyLjc4MTI1IDAuMDksMC4yMDMxIDEuMjgsNC44NzUgMS44OSw3LjM1OTQgbCAyLjE4LDguOTM3NSBjIDAuNiwyLjE4NzUgMS4xOSw0LjM1OTQgMS42OSw2LjY1NjIgMC4zOSwxLjY4NzUgMS4xOSw0LjU2MjUgMS4yOCw0Ljk2ODggMS41LDMuMDc4MSA2Ljc3LDEyLjEwOTQgMTYuMjEsMTIuMTA5NCA0LjQ3LDAgNS4zNiwtMy42NzE5IDUuMzYsLTYuOTUzMiAwLC0yLjQ4NDMgLTAuNzEsLTUuMjY1NiAtMS41LC04LjI1IEwgMTA0Ni43MywyNSBsIC0xLjk4LC03LjU0NjkgYyAtMC4zOSwtMS45ODQzIC0xLjI4LC01LjM1OTMgLTEuMjgsLTUuODU5MyAwLC0xLjc5NjkyIDEuMzksLTIuNjg3NTUgMi44NywtMi42ODc1NSAzLjA4LDAgMy42OCwyLjQ4NDM1IDQuNDcsNS42NTYyNSAxLjM5LDUuNTYyNSA1LjA3LDIwLjA3ODEgNS45NywyMy45NTMxIDAuMywxLjI4MTMgNS41NiwxMy4yMDMyIDE2LjM5LDEzLjIwMzIgNC4yNywwIDUuMzYsLTMuMzc1IDUuMzYsLTYuOTUzMiAwLC01LjY1NjIgLTQuMTcsLTE2Ljk4NDMgLTYuMTUsLTIyLjI1IC0wLjkxLC0yLjM5MDYgLTEuMywtMy40Njg3IC0xLjMsLTUuNDY4NyAwLC00LjY1NjMgMy40OCwtOC4xNDA2NSA4LjE0LC04LjE0MDY1IDkuMzQsMCAxMy4wMSwxNC41MDAwNSAxMy4wMSwxNS4yOTY4NSAwLDEgLTAuODksMSAtMS4xOCwxIC0xLDAgLTEsLTAuMjk2OCAtMS40OSwtMS43OTY4IC0xLjUsLTUuMjY1NyAtNC42NywtMTIuMzEyNSAtMTAuMTQsLTEyLjMxMjUgLTEuNjksMCAtMi4zNywxIC0yLjM3LDMuMjgxMiAwLDIuNDg0NCAwLjg5LDQuODU5NCAxLjc4LDcuMDQ2OSAxLjg5LDUuMTcxOSA2LjA2LDE2LjE4NzUgNi4wNiwyMS44NTk0IDAsNi40NTMxIC0zLjk4LDEwLjYyNSAtMTEuNDIsMTAuNjI1IC03LjQ1LDAgLTEyLjUyLC00LjM3NSAtMTYuMiwtOS42NDA3IC0wLjEsMS4yOTY5IC0wLjM5LDQuNjcxOSAtMy4xOCw3LjA2MjUgLTIuNDgsMi4wNzgyIC01LjY1LDIuNTc4MiAtOC4xNCwyLjU3ODIgLTguOTUsMCAtMTMuODEsLTYuMzU5NCAtMTUuNSwtOC42NDA3IC0wLjUsNS42NTYzIC00LjY3LDguNjQwNyAtOS4xNCw4LjY0MDcgLTQuNTgsMCAtNi40NSwtMy44NzUgLTcuMzYsLTUuNjU2MyAtMS43OCwtMy40ODQ0IC0zLjA3LC05LjM0MzcgLTMuMDcsLTkuNjQwNiAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMTA5NCAxLjY5LDIuMjk2OSAxLjY4LDcuMDQ2OCAzLjY3LDExLjgxMjUgNy4yNSwxMS44MTI1IDEuNTksMCAzLjA3LC0wLjc5NjkgMy4wNywtNC41NjI1IDAsLTIuMDkzOCAtMC4yOSwtMy4xODc1IC0xLjU5LC04LjM0MzggbCAtNS43NywtMjIuOTUzMSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE2MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMTA3LjYxLDE3LjY1NjMgMTAuNTMsMTAuMjE4NyBjIDE1LjUsMTMuNzE4OCAyMS40NywxOS4wNzgxIDIxLjQ3LDI5LjAxNTYgMCwxMS4zMjgyIC04Ljk1LDE5LjI2NTcgLTIxLjA2LDE5LjI2NTcgLTExLjI0LDAgLTE4LjU4LC05LjE0MDcgLTE4LjU4LC0xNy45ODQ0IDAsLTUuNTYyNSA0Ljk3LC01LjU2MjUgNS4yNiwtNS41NjI1IDEuNjksMCA1LjE2LDEuMjAzMSA1LjE2LDUuMjY1NiAwLDIuNTkzOCAtMS43OCw1LjE3MTkgLTUuMjYsNS4xNzE5IC0wLjc5LDAgLTAuOTksMCAtMS4yOSwtMC4wOTM4IDIuMjksNi40NTMyIDcuNjQsMTAuMTI1IDEzLjQxLDEwLjEyNSA5LjA1LDAgMTMuMzEsLTguMDQ2OCAxMy4zMSwtMTYuMTg3NSAwLC03Ljk1MzEgLTQuOTcsLTE1Ljc5NjggLTEwLjQzLC0yMS45NTMxIGwgLTE5LjA3LC0yMS4yNjU2IGMgLTEuMDksLTEuMDkzOCAtMS4wOSwtMS4yODEzIC0xLjA5LC0zLjY3MTkgbCAzNi44NiwwIDIuNzgsMTcuMjgxMyAtMi40OCwwIGMgLTAuNSwtMi45ODQ0IC0xLjIxLC03LjM0MzggLTIuMTksLTguODQzOCAtMC43MSwtMC43ODEyIC03LjI1LC0wLjc4MTIgLTkuNDQsLTAuNzgxMiBsIC0xNy44OSwwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTY0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMjAuODYsMTE3Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTY2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDEyMTUuNjYsODUuNzM0NCBjIDAsOS4wNDY5IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzMSAtNi42MSwtNi4zMjgxIDAsLTEuNzE4OCAxLC0yLjczNDQgMS41OCwtMy4yOTY5IDEuNDMsLTEuMjk2OSA1LjE3LC01LjE3MTkgNS4xNywtMTIuNjU2MyAwLC02LjAzMTIgLTguNjMsLTM5LjY0MDYgLTI1Ljg2LC0zOS42NDA2IC04Ljc3LDAgLTEwLjQ5LDcuMzI4MSAtMTAuNDksMTIuNjQwNiAwLDcuMTg3NSAzLjMsMTcuMjM0NCA3LjE5LDI3LjU3ODIgMi4zLDUuODkwNiAyLjg4LDcuMzI4MSAyLjg4LDEwLjIwMzEgMCw2LjAzMTIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MzggLTE4LjUzLC0yMS45ODQ0IDAsLTAuNTc4MSAwLjU3LC0xLjI5NjkgMS41NywtMS4yOTY5IDEuMywwIDEuNDQsMC41NzgyIDIuMDIsMi41OTM4IDMuNDUsMTIuMzQzNyA5LjA1LDE3LjgxMjUgMTQuNTEsMTcuODEyNSAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQ0IC0xLjU4LC03Ljg5MDYgLTMuNzQsLTEzLjM1OTQgLTYuOSwtMTguMzkwNiAtNi45LC0yMi44NDM3IC02LjksLTI2LjI4MTIgMCwtMy4xNzE5IDAuNDQsLTkuMDQ2OSA0Ljg5LC0xMy4wNzgyIDUuMTcsLTQuNDUzMSAxMi4zNiwtNC40NTMxIDEzLjY0LC00LjQ1MzEgMjMuODYsMCAzMi4wNSw0Ni45ODQ0IDMyLjA1LDU1LjE3MTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxNjgiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTIzMS42MSwxNy42NTYzIDEwLjUzLDEwLjIxODcgYyAxNS41LDEzLjcxODggMjEuNDcsMTkuMDc4MSAyMS40NywyOS4wMTU2IDAsMTEuMzI4MiAtOC45NSwxOS4yNjU3IC0yMS4wNiwxOS4yNjU3IC0xMS4yNCwwIC0xOC41OCwtOS4xNDA3IC0xOC41OCwtMTcuOTg0NCAwLC01LjU2MjUgNC45NywtNS41NjI1IDUuMjYsLTUuNTYyNSAxLjY5LDAgNS4xNiwxLjIwMzEgNS4xNiw1LjI2NTYgMCwyLjU5MzggLTEuNzgsNS4xNzE5IC01LjI2LDUuMTcxOSAtMC43OSwwIC0wLjk5LDAgLTEuMjksLTAuMDkzOCAyLjI5LDYuNDUzMiA3LjY0LDEwLjEyNSAxMy40MSwxMC4xMjUgOS4wNSwwIDEzLjMxLC04LjA0NjggMTMuMzEsLTE2LjE4NzUgMCwtNy45NTMxIC00Ljk3LC0xNS43OTY4IC0xMC40MywtMjEuOTUzMSBsIC0xOS4wNywtMjEuMjY1NiBjIC0xLjA5LC0xLjA5MzggLTEuMDksLTEuMjgxMyAtMS4wOSwtMy42NzE5IGwgMzYuODYsMCAyLjc4LDE3LjI4MTMgLTIuNDgsMCBjIC0wLjUsLTIuOTg0NCAtMS4yMSwtNy4zNDM4IC0yLjE5LC04Ljg0MzggLTAuNzEsLTAuNzgxMiAtNy4yNSwtMC43ODEyIC05LjQ0LC0wLjc4MTIgbCAtMTcuODksMCIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE3MCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxMzYyLjMxLDY1LjE4NzUgMzkuNjYsMCBjIDIuMDEsMCA0LjU5LDAgNC41OSwyLjU3ODEgMCwyLjczNDQgLTIuNDMsMi43MzQ0IC00LjU5LDIuNzM0NCBsIC0zOS42NiwwIDAsMzkuNjU2IGMgMCwyIDAsNC41OTQgLTIuNTgsNC41OTQgLTIuNzMsMCAtMi43MywtMi40NTMgLTIuNzMsLTQuNTk0IGwgMCwtMzkuNjU2IC0zOS42NCwwIGMgLTIuMDIsMCAtNC42MSwwIC00LjYxLC0yLjU3ODEgMCwtMi43MzQ0IDIuNDUsLTIuNzM0NCA0LjYxLC0yLjczNDQgbCAzOS42NCwwIDAsLTM5LjY1NjIgYyAwLC0yIDAsLTQuNTkzOCAyLjU5LC00LjU5MzggMi43MiwwIDIuNzIsMi40Mzc1IDIuNzIsNC41OTM4IGwgMCwzOS42NTYyIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTcyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE0NzIuNDQsMzguODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc0IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE1MzUuNDQsMzguODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE1OTkuNDQsMzguODkwNiBjIDAsNC4xNzE5IC0zLjQ2LDcuMDQ2OSAtNi45MSw3LjA0NjkgLTQuMTUsMCAtNy4wMywtMy40NTMxIC03LjAzLC02Ljg5MDYgMCwtNC4xNzE5IDMuNDUsLTcuMDQ2OSA2Ljg5LC03LjA0NjkgNC4xNywwIDcuMDUsMy40NTMxIDcuMDUsNi44OTA2IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTc4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE2OTkuMzEsNjUuMTg3NSAzOS42NiwwIGMgMi4wMSwwIDQuNTksMCA0LjU5LDIuNTc4MSAwLDIuNzM0NCAtMi40MywyLjczNDQgLTQuNTksMi43MzQ0IGwgLTM5LjY2LDAgMCwzOS42NTYgYyAwLDIgMCw0LjU5NCAtMi41OCw0LjU5NCAtMi43MywwIC0yLjczLC0yLjQ1MyAtMi43MywtNC41OTQgbCAwLC0zOS42NTYgLTM5LjY0LDAgYyAtMi4wMiwwIC00LjYxLDAgLTQuNjEsLTIuNTc4MSAwLC0yLjczNDQgMi40NSwtMi43MzQ0IDQuNjEsLTIuNzM0NCBsIDM5LjY0LDAgMCwtMzkuNjU2MiBjIDAsLTIgMCwtNC41OTM4IDIuNTksLTQuNTkzOCAyLjcyLDAgMi43MiwyLjQzNzUgMi43Miw0LjU5MzggbCAwLDM5LjY1NjIiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxODAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMTgyNy4yMyw0OS4wOTM4IGMgLTAuNzEsLTIuNDM3NSAtMC43MSwtMi43MzQ0IC0yLjcxLC01LjQ1MzIgLTMuMTgsLTQuMDMxMiAtOS40OSwtMTAuMjAzMSAtMTYuMjQsLTEwLjIwMzEgLTUuODksMCAtOS4yLDUuMzEyNSAtOS4yLDEzLjc5NjkgMCw3Ljg5MDYgNC40NSwyMy45ODQ0IDcuMTksMzAuMDE1NiA0Ljg5LDEwLjA2MjUgMTEuNjQsMTUuMjM0NCAxNy4yMywxNS4yMzQ0IDkuNDgsMCAxMS4zNiwtMTEuNzgxMyAxMS4zNiwtMTIuOTM3NSAwLC0wLjE0MDYgLTAuNDQsLTIgLTAuNTgsLTIuMjk2OSBsIC03LjA1LC0yOC4xNTYyIHogbSA5LjIxLDM2Ljc4MTIgYyAtMS41OCwzLjczNDQgLTUuNDcsOS40ODQ0IC0xMi45NCw5LjQ4NDQgLTE2LjIzLDAgLTMzLjc1LC0yMC45ODQ0IC0zMy43NSwtNDIuMjM0NCAwLC0xNC4yMzQ0IDguMzMsLTIyLjU2MjUgMTguMDksLTIyLjU2MjUgNy45MSwwIDE0LjY2LDYuMTcxOSAxOC42OCwxMC45MjE5IDEuNDMsLTguNDg0NCA4LjE4LC0xMC45MjE5IDEyLjUsLTEwLjkyMTkgNC4zMSwwIDcuNzYsMi41OTM4IDEwLjM0LDcuNzY1NiAyLjMsNC44NzUgNC4zMSwxMy42NDA3IDQuMzEsMTQuMjE4OCAwLDAuNzE4NyAtMC41OCwxLjI4MTIgLTEuNDQsMS4yODEyIC0xLjI5LDAgLTEuNDMsLTAuNzAzMSAtMi4wMSwtMi44NTkzIC0yLjE0LC04LjQ4NDQgLTQuODgsLTE3LjUzMTMgLTEwLjc3LC0xNy41MzEzIC00LjE3LDAgLTQuNDUsMy43MzQ0IC00LjQ1LDYuNjA5NCAwLDMuMjk2OSAwLjQyLDQuODc1IDEuNzIsMTAuNDg0NCAxLjAxLDMuNTkzNyAxLjczLDYuNzUgMi44NywxMC45MjE4IDUuMzIsMjEuNTQ2OSA2LjYxLDI2LjcxODggNi42MSwyNy41NzgyIDAsMi4wMTU2IC0xLjU3LDMuNTkzNyAtMy43MywzLjU5MzcgLTQuNTksMCAtNS43NSwtNS4wMzEyIC02LjAzLC02Ljc1IiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTgyIgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDE4NjUuNzMsMTUuODU5NCBjIC0wLjI5LC0xLjQ4NDQgLTAuODksLTMuNzY1NiAtMC44OSwtNC4yNjU2IDAsLTEuNzk2OTIgMS4zOSwtMi42ODc1NSAyLjg5LC0yLjY4NzU1IDEuMTksMCAyLjk3LDAuNzk2ODggMy42OCwyLjc4MTI1IDAuMDksMC4yMDMxIDEuMjgsNC44NzUgMS44OSw3LjM1OTQgbCAyLjE4LDguOTM3NSBjIDAuNiwyLjE4NzUgMS4xOSw0LjM1OTQgMS42OSw2LjY1NjIgMC4zOSwxLjY4NzUgMS4xOSw0LjU2MjUgMS4yOCw0Ljk2ODggMS41LDMuMDc4MSA2Ljc3LDEyLjEwOTQgMTYuMjEsMTIuMTA5NCA0LjQ3LDAgNS4zNiwtMy42NzE5IDUuMzYsLTYuOTUzMiAwLC0yLjQ4NDMgLTAuNzEsLTUuMjY1NiAtMS41LC04LjI1IEwgMTg5NS43MywyNSBsIC0xLjk4LC03LjU0NjkgYyAtMC4zOSwtMS45ODQzIC0xLjI4LC01LjM1OTMgLTEuMjgsLTUuODU5MyAwLC0xLjc5NjkyIDEuMzksLTIuNjg3NTUgMi44NywtMi42ODc1NSAzLjA4LDAgMy42OCwyLjQ4NDM1IDQuNDcsNS42NTYyNSAxLjM5LDUuNTYyNSA1LjA3LDIwLjA3ODEgNS45NywyMy45NTMxIDAuMywxLjI4MTMgNS41NiwxMy4yMDMyIDE2LjM5LDEzLjIwMzIgNC4yNywwIDUuMzYsLTMuMzc1IDUuMzYsLTYuOTUzMiAwLC01LjY1NjIgLTQuMTcsLTE2Ljk4NDMgLTYuMTUsLTIyLjI1IC0wLjkxLC0yLjM5MDYgLTEuMywtMy40Njg3IC0xLjMsLTUuNDY4NyAwLC00LjY1NjMgMy40OCwtOC4xNDA2NSA4LjE0LC04LjE0MDY1IDkuMzQsMCAxMy4wMSwxNC41MDAwNSAxMy4wMSwxNS4yOTY4NSAwLDEgLTAuODksMSAtMS4xOCwxIC0xLDAgLTEsLTAuMjk2OCAtMS40OSwtMS43OTY4IC0xLjUsLTUuMjY1NyAtNC42NywtMTIuMzEyNSAtMTAuMTQsLTEyLjMxMjUgLTEuNjksMCAtMi4zNywxIC0yLjM3LDMuMjgxMiAwLDIuNDg0NCAwLjg5LDQuODU5NCAxLjc4LDcuMDQ2OSAxLjg5LDUuMTcxOSA2LjA2LDE2LjE4NzUgNi4wNiwyMS44NTk0IDAsNi40NTMxIC0zLjk4LDEwLjYyNSAtMTEuNDIsMTAuNjI1IC03LjQ1LDAgLTEyLjUyLC00LjM3NSAtMTYuMiwtOS42NDA3IC0wLjEsMS4yOTY5IC0wLjM5LDQuNjcxOSAtMy4xOCw3LjA2MjUgLTIuNDgsMi4wNzgyIC01LjY1LDIuNTc4MiAtOC4xNCwyLjU3ODIgLTguOTUsMCAtMTMuODEsLTYuMzU5NCAtMTUuNSwtOC42NDA3IC0wLjUsNS42NTYzIC00LjY3LDguNjQwNyAtOS4xNCw4LjY0MDcgLTQuNTgsMCAtNi40NSwtMy44NzUgLTcuMzYsLTUuNjU2MyAtMS43OCwtMy40ODQ0IC0zLjA3LC05LjM0MzcgLTMuMDcsLTkuNjQwNiAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMTA5NCAxLjY5LDIuMjk2OSAxLjY4LDcuMDQ2OCAzLjY3LDExLjgxMjUgNy4yNSwxMS44MTI1IDEuNTksMCAzLjA3LC0wLjc5NjkgMy4wNywtNC41NjI1IDAsLTIuMDkzOCAtMC4yOSwtMy4xODc1IC0xLjU5LC04LjM0MzggbCAtNS43NywtMjIuOTUzMSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE4NCIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAxOTUzLjczLDE1Ljg1OTQgYyAtMC4yOSwtMS40ODQ0IC0wLjg5LC0zLjc2NTYgLTAuODksLTQuMjY1NiAwLC0xLjc5NjkyIDEuMzksLTIuNjg3NTUgMi44OSwtMi42ODc1NSAxLjE5LDAgMi45NywwLjc5Njg4IDMuNjgsMi43ODEyNSAwLjA5LDAuMjAzMSAxLjI4LDQuODc1IDEuODksNy4zNTk0IGwgMi4xOCw4LjkzNzUgYyAwLjYsMi4xODc1IDEuMTksNC4zNTk0IDEuNjksNi42NTYyIDAuMzksMS42ODc1IDEuMTksNC41NjI1IDEuMjgsNC45Njg4IDEuNSwzLjA3ODEgNi43NywxMi4xMDk0IDE2LjIxLDEyLjEwOTQgNC40NywwIDUuMzYsLTMuNjcxOSA1LjM2LC02Ljk1MzIgMCwtNi4xNTYyIC00Ljg4LC0xOC44NzUgLTYuNDYsLTIzLjE0MDYgLTAuOSwtMi4yODEyIC0xLC0zLjQ4NDQgLTEsLTQuNTc4MSAwLC00LjY1NjMgMy40OSwtOC4xNDA2NSA4LjE0LC04LjE0MDY1IDkuMzUsMCAxMy4wMiwxNC41MDAwNSAxMy4wMiwxNS4yOTY4NSAwLDEgLTAuODksMSAtMS4xOSwxIC0xLDAgLTEsLTAuMjk2OCAtMS40OCwtMS43OTY4IC0yLC02Ljc1IC01LjI3LC0xMi4zMTI1IC0xMC4xNCwtMTIuMzEyNSAtMS42OSwwIC0yLjM5LDEgLTIuMzksMy4yODEyIDAsMi40ODQ0IDAuOSw0Ljg1OTQgMS43OSw3LjA0NjkgMS44OSw1LjI2NTYgNi4wNywxNi4xODc1IDYuMDcsMjEuODU5NCAwLDYuNjU2MiAtNC4yOSwxMC42MjUgLTExLjQzLDEwLjYyNSAtOC45NSwwIC0xMy44MSwtNi4zNTk0IC0xNS41LC04LjY0MDcgLTAuNSw1LjU2MjUgLTQuNTcsOC42NDA3IC05LjE0LDguNjQwNyAtNC41OCwwIC02LjQ1LC0zLjg3NSAtNy40NSwtNS42NTYzIC0xLjU5LC0zLjM3NSAtMi45OCwtOS4yNSAtMi45OCwtOS42NDA2IDAsLTEgMSwtMSAxLjIsLTEgMC45OCwwIDEuMDksMC4xMDk0IDEuNjksMi4yOTY5IDEuNjgsNy4wNDY4IDMuNjcsMTEuODEyNSA3LjI1LDExLjgxMjUgMS45OCwwIDMuMDcsLTEuMjgxMyAzLjA3LC00LjU2MjUgMCwtMi4wOTM4IC0wLjI5LC0zLjE4NzUgLTEuNTksLTguMzQzOCBsIC01Ljc3LC0yMi45NTMxIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTg2IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwODAuODYsMTE3Ljc2NiBjIC0xLjczLC0xLjU3OCAtNy4wNSwtNi42MSAtNy4wNSwtOC42MjUgMCwtMS40MzggMS4zLC0yLjcxOSAyLjc0LC0yLjcxOSAxLjI5LDAgMS44NywwLjg1OSAyLjg3LDIuMjk3IDMuNDYsNC4yOTcgNy4zMyw3LjAzMSAxMC42Myw4LjkwNiAxLjQzLDAuODU5IDIuNDUsMS4yODEgMi40NSwyLjg3NSAwLDEuMjgxIC0xLjE2LDIgLTIuMDIsMi43MTkgLTQuMDMsMi43MzQgLTUuMDMsNi42MDkgLTUuNDYsOC4zMjggLTAuNDMsMS4xNTYgLTAuODYsMi44NzUgLTIuODYsMi44NzUgLTAuODgsMCAtMi42LC0wLjU2MyAtMi42LC0yLjcxOSAwLC0xLjI5NyAwLjg2LC00Ljc1IDMuNiwtOC42MjUgbCAtNDguMjcsMCBjIC0yLjQ1LDAgLTQuODksMCAtNC44OSwtMi43MzQgMCwtMi41NzggMi41OSwtMi41NzggNC44OSwtMi41NzggbCA0NS45NywwIiAvPjxwYXRoCiAgICAgICAgIGlkPSJwYXRoMTg4IgogICAgICAgICBzdHlsZT0iZmlsbDojMDAwMDAwO2ZpbGwtb3BhY2l0eToxO2ZpbGwtcnVsZTpub256ZXJvO3N0cm9rZTpub25lIgogICAgICAgICBkPSJtIDIwNzUuNjYsODUuNzM0NCBjIDAsOS4wNDY5IC00LjYxLDkuNjI1IC01Ljc1LDkuNjI1IC0zLjQ2LDAgLTYuNjEsLTMuNDUzMSAtNi42MSwtNi4zMjgxIDAsLTEuNzE4OCAxLC0yLjczNDQgMS41OCwtMy4yOTY5IDEuNDMsLTEuMjk2OSA1LjE3LC01LjE3MTkgNS4xNywtMTIuNjU2MyAwLC02LjAzMTIgLTguNjMsLTM5LjY0MDYgLTI1Ljg2LC0zOS42NDA2IC04Ljc3LDAgLTEwLjQ5LDcuMzI4MSAtMTAuNDksMTIuNjQwNiAwLDcuMTg3NSAzLjMsMTcuMjM0NCA3LjE5LDI3LjU3ODIgMi4zLDUuODkwNiAyLjg4LDcuMzI4MSAyLjg4LDEwLjIwMzEgMCw2LjAzMTIgLTQuMzIsMTEuNSAtMTEuMzYsMTEuNSAtMTMuMjIsMCAtMTguNTMsLTIwLjg0MzggLTE4LjUzLC0yMS45ODQ0IDAsLTAuNTc4MSAwLjU3LC0xLjI5NjkgMS41NywtMS4yOTY5IDEuMywwIDEuNDQsMC41NzgyIDIuMDIsMi41OTM4IDMuNDUsMTIuMzQzNyA5LjA1LDE3LjgxMjUgMTQuNTEsMTcuODEyNSAxLjI5LDAgMy43NCwwIDMuNzQsLTQuNzUgMCwtMy43MzQ0IC0xLjU4LC03Ljg5MDYgLTMuNzQsLTEzLjM1OTQgLTYuOSwtMTguMzkwNiAtNi45LC0yMi44NDM3IC02LjksLTI2LjI4MTIgMCwtMy4xNzE5IDAuNDQsLTkuMDQ2OSA0Ljg5LC0xMy4wNzgyIDUuMTcsLTQuNDUzMSAxMi4zNiwtNC40NTMxIDEzLjY0LC00LjQ1MzEgMjMuODYsMCAzMi4wNSw0Ni45ODQ0IDMyLjA1LDU1LjE3MTkiIC8+PHBhdGgKICAgICAgICAgaWQ9InBhdGgxOTAiCiAgICAgICAgIHN0eWxlPSJmaWxsOiMwMDAwMDA7ZmlsbC1vcGFjaXR5OjE7ZmlsbC1ydWxlOm5vbnplcm87c3Ryb2tlOm5vbmUiCiAgICAgICAgIGQ9Im0gMjA4Ni43MywxNS44NTk0IGMgLTAuMjksLTEuNDg0NCAtMC44OSwtMy43NjU2IC0wLjg5LC00LjI2NTYgMCwtMS43OTY5MiAxLjM5LC0yLjY4NzU1IDIuODksLTIuNjg3NTUgMS4xOSwwIDIuOTcsMC43OTY4OCAzLjY4LDIuNzgxMjUgMC4wOSwwLjIwMzEgMS4yOCw0Ljg3NSAxLjg5LDcuMzU5NCBsIDIuMTgsOC45Mzc1IGMgMC42LDIuMTg3NSAxLjE5LDQuMzU5NCAxLjY5LDYuNjU2MiAwLjM5LDEuNjg3NSAxLjE5LDQuNTYyNSAxLjI4LDQuOTY4OCAxLjUsMy4wNzgxIDYuNzcsMTIuMTA5NCAxNi4yMSwxMi4xMDk0IDQuNDcsMCA1LjM2LC0zLjY3MTkgNS4zNiwtNi45NTMyIDAsLTYuMTU2MiAtNC44OCwtMTguODc1IC02LjQ2LC0yMy4xNDA2IC0wLjksLTIuMjgxMiAtMSwtMy40ODQ0IC0xLC00LjU3ODEgMCwtNC42NTYzIDMuNDksLTguMTQwNjUgOC4xNCwtOC4xNDA2NSA5LjM1LDAgMTMuMDIsMTQuNTAwMDUgMTMuMDIsMTUuMjk2ODUgMCwxIC0wLjg5LDEgLTEuMTksMSAtMSwwIC0xLC0wLjI5NjggLTEuNDgsLTEuNzk2OCAtMiwtNi43NSAtNS4yNywtMTIuMzEyNSAtMTAuMTQsLTEyLjMxMjUgLTEuNjksMCAtMi4zOSwxIC0yLjM5LDMuMjgxMiAwLDIuNDg0NCAwLjksNC44NTk0IDEuNzksNy4wNDY5IDEuODksNS4yNjU2IDYuMDcsMTYuMTg3NSA2LjA3LDIxLjg1OTQgMCw2LjY1NjIgLTQuMjksMTAuNjI1IC0xMS40MywxMC42MjUgLTguOTUsMCAtMTMuODEsLTYuMzU5NCAtMTUuNSwtOC42NDA3IC0wLjUsNS41NjI1IC00LjU3LDguNjQwNyAtOS4xNCw4LjY0MDcgLTQuNTgsMCAtNi40NSwtMy44NzUgLTcuNDUsLTUuNjU2MyAtMS41OSwtMy4zNzUgLTIuOTgsLTkuMjUgLTIuOTgsLTkuNjQwNiAwLC0xIDEsLTEgMS4yLC0xIDAuOTgsMCAxLjA5LDAuMTA5NCAxLjY5LDIuMjk2OSAxLjY4LDcuMDQ2OCAzLjY3LDExLjgxMjUgNy4yNSwxMS44MTI1IDEuOTgsMCAzLjA3LC0xLjI4MTMgMy4wNywtNC41NjI1IDAsLTIuMDkzOCAtMC4yOSwtMy4xODc1IC0xLjU5LC04LjM0MzggbCAtNS43NywtMjIuOTUzMSIgLz48cGF0aAogICAgICAgICBpZD0icGF0aDE5MiIKICAgICAgICAgc3R5bGU9ImZpbGw6IzAwMDAwMDtmaWxsLW9wYWNpdHk6MTtmaWxsLXJ1bGU6bm9uemVybztzdHJva2U6bm9uZSIKICAgICAgICAgZD0ibSAyMTY5LjQ0LDM4Ljg5MDYgYyAwLDQuMTcxOSAtMy40Niw3LjA0NjkgLTYuOTEsNy4wNDY5IC00LjE1LDAgLTcuMDMsLTMuNDUzMSAtNy4wMywtNi44OTA2IDAsLTQuMTcxOSAzLjQ1LC03LjA0NjkgNi44OSwtNy4wNDY5IDQuMTcsMCA3LjA1LDMuNDUzMSA3LjA1LDYuODkwNiIgLz48L2c+PC9nPjwvc3ZnPg==)

 в базисе
в базисе  (потому что как их ни складывай, а коэффициент при
(потому что как их ни складывай, а коэффициент при 

 (деления на ноль не возникнет, так уж мы
выбирали
(деления на ноль не возникнет, так уж мы
выбирали  ) и получим матрицу
) и получим матрицу

 для
каждой
для
каждой  -й строки и получим матрицу вида
-й строки и получим матрицу вида

 , и мы приходим к искомому противоречию.Так что пусть ненулевой элемент нашёлся. Если он нашёлся в какой-то строчке,
которая ниже первой, то поставим её на место второй: получаем матрицу
, и мы приходим к искомому противоречию.Так что пусть ненулевой элемент нашёлся. Если он нашёлся в какой-то строчке,
которая ниже первой, то поставим её на место второй: получаем матрицу

 . Проделав всё это, получим матрицу вида
. Проделав всё это, получим матрицу вида


 векторов нашего нового базиса —
нулевые! Получается, что мы взяли некоторый базис и, используя только
преобразования, которые заведомо оставляют его базисом, пришли к странной
системе векторов, среди которых даже есть нулевые и которая поэтому
совершенно точно не способна быть базисом. Это противоречит тому, что
исходная система векторов
векторов нашего нового базиса —
нулевые! Получается, что мы взяли некоторый базис и, используя только
преобразования, которые заведомо оставляют его базисом, пришли к странной
системе векторов, среди которых даже есть нулевые и которая поэтому
совершенно точно не способна быть базисом. Это противоречит тому, что
исходная система векторов  .Кроме того, если в
.Кроме того, если в